一种停车场防跟车尾随交通控制系统的制作方法
- 国知局
- 2024-10-21 14:44:38
本发明涉及交通控制,具体涉及一种停车场防跟车尾随交通控制系统。
背景技术:
1、现有的车库如小区的地下车库、商场的车库进入口出均布置有闸机,闸机是专门用于道路上限制机动车行驶通道的出入口管理设备,现在广泛应用于各种商场停车场出入口,小区停车场出入口等,用于管理车辆的出入。
2、现有的闸机的挡车杆配置有信号传感模块以及防砸车感应模块,在车辆经过一定距离后,在检测区域处未发现有车辆时,挡车杆才会下落,这就会造成一个时间差,如果在使用过程中,当前一辆车通过门禁道闸后,后一辆车若紧跟前车尾驶出,导致挡车杆无法准确下落,出现车辆尾随逃费的情况,影响了停车场的交通秩序和车辆的收费管理效率,有待改进。
技术实现思路
1、基于上述表述,本发明提供了一种停车场防跟车尾随交通控制系统,以解决现有停车场会出现跟车尾随逃费的问题。
2、本发明解决上述技术问题的技术方案如下:
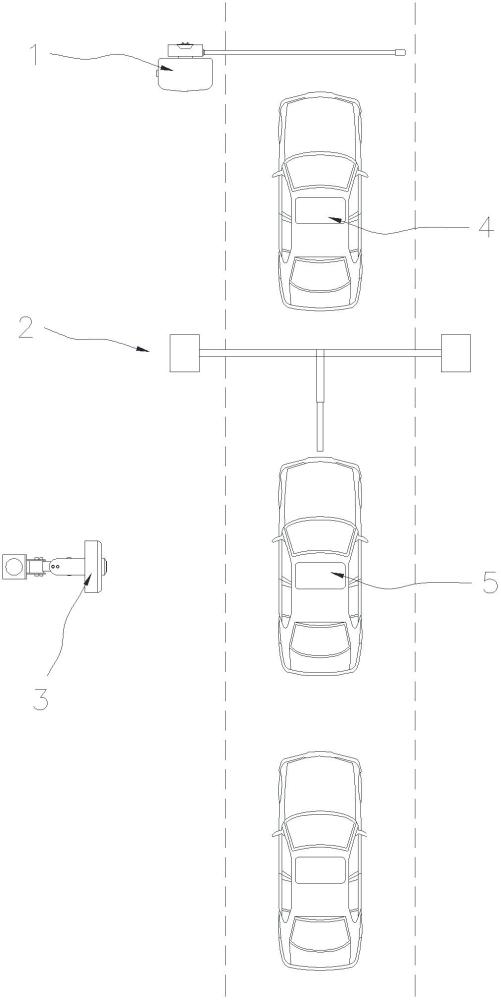
3、一种停车场防跟车尾随交通控制系统,包括设置于停车场出口处的闸机,还包括设置于闸机后方的阻拦装置以及设置于阻拦装置后方的图像拍摄装置;所述阻拦装置为横跨道路的“门”形结构,所述阻拦装置包括一对竖向间隔设置的立柱,所述立柱的底部通过底座与地面固定,在立柱内侧设置有竖直的第一丝杆,第一丝杆的上端与立柱的上端转动连接,在第一丝杆的下端设置有第一电机,所述第一电机的壳体与立柱固定连接,所述第一电机的输出轴与丝杆的下端同轴连接,两立柱之间设置有横梁,在横梁的端部设置有螺纹孔,所述第一丝杆穿过螺纹孔并与螺纹孔适配;所述横梁上安装有用于后方的车辆图像的摄像头模块;所述阻拦装置还包括设置于横梁上方的测距机构,测距机构向横梁的后方伸出,在测距机构的后端安装有距离传感器,所述距离传感器朝向下方地面,用于检测下方的车辆;该系统还包括用于控制第一电机的控制器,所述距离传感器与控制器电连接;
4、当闸机拍摄到驶出区域有出场车辆,且距离传感器感知到跟行车辆时,判断跟行车辆有尾随出场意图;与此同时摄像头模块拍摄到跟行车辆正面的图像并将图像数据传输至控制器,控制器对图像中车辆的车牌号进行识别,识别成功后控制器向停车计费系统发送验证信息,停车计费系统接收到验证信息后查询跟行车辆的出场缴费记录,若发现跟行车辆还未缴费,则停车计费系统向控制器发送“未缴费”信号,若跟行车辆已缴费,则停车计费系统向控制器发送“已缴费”信号;与此同时图像拍摄装置拍摄跟行车辆的图像,且控制器通过对图像处理得到跟行车辆的三个特征点的实际高度,三个特征点分别为a、b、c,其中a点为车辆上最靠前的点;b点为车辆前机盖与前挡风玻璃之间的转折点;c点为车辆顶棚前边缘点;
5、当主控模块判断出跟行车辆有尾随出场意图,并得到跟行车辆的三个特征点,且主控模块收到停车计费系统的“未缴费”信号时,此时主控模块选取b点和c点作为参考点位,计算出拦截高度h=0.5×(hb+ hc),式中hb代表b点的高度、hc为c点的高度;当主控模块判断出跟行车辆有尾随出场意图,并得到跟行车辆的三个特征点,且主控模块收到停车计费系统的“未缴费”信号时,此时主控模块选取a点和b点作为参考点位,计算出拦截高度h=0.5×(ha+ hb),式中ha代表a点的高度、hb为b点的高度;
6、控制器计算出拦截高度后,控制柜第一电机所需的转动角度,将横梁调节至所需拦截高度;
7、待出场车辆驶出后且闸机挡车杆开始回落时,闸机控制系统向控制器输出一反馈信号,控制器接收到该反馈信号后控制横梁回复初始高度。
8、作为优选方案:所述测距机构包括中空的支撑筒和中空的伸缩杆,所述伸缩杆活动设置于支撑筒内,所述支撑筒的前端通过连接柱与横梁固定连接,所述伸缩杆的前端伸入到支撑筒内;所述距离传感器安装在伸缩杆的后端;所述支撑筒内的前端安装有第二电机,并在支撑筒内设置有第二丝杆,所述第二丝杆沿支撑筒的长度方向设置,所述伸缩杆的前端安装有螺纹套,所述第二丝杆的前端与第二电机的输出轴同轴连接,所述第二丝杆的后端穿过螺纹套并与螺纹套适配,所述第二丝杆的后端伸入到伸缩杆内,所述第二电机与控制器连接并受控制器控制;当摄像头模块拍摄到横梁后方的图像后,控制器对图像中的车辆特征进行识别,以识别并统计横梁后方排队等待出场的车辆数量;系统预先对排队等待车辆的数量区间与尾随判断距离的值进行标定,当控制器识别到排队车辆数量时,控制器判断数量落在哪一数量区间,再调取该数量区间对应的尾随判断距离的值,据此换算出距离传感器需要移动的行程,进而换算出第二电机所需的转动角度,接着控制器控制第二电机转动所需角度,从而将尾随判断距离调节至所需值。
9、作为优选方案:对图像处理得到跟行车辆的三个特征点的实际高度的过程为,先将图像进行二值化处理,进行二值化处理后可以使车辆轮廓线清洗显现;随后对二值化图像中车辆上表面轮廓线的a、b、c三个特征点进行识别;对识别出三个特征点后对每个特征点进行标记;随后将标记后的二值化图像进行坐标化处理,图像的左下角即为坐标系的原点,再读取各个被标记的特征点的纵坐标值;最后根据拍摄装置拍摄图像的实际覆盖范围的高度和纵坐标值换算出三个特征点的实际高度。
10、作为优选方案:所述控制器包括主控模块、第一驱动模块、第二驱动模块、存储模块、通信模块以及电源模块;其中第一驱动模块的输入端与主控模块的控制信号输出端连接,第一驱动模块的输出端与第一电机的控制端连接;第二驱动模块的输入端与主控模块的控制信号输出端连接,第二驱动模块的输出端与第二电机的控制端连接;存储模块与主控模块的数据读写端口连接;通信模块与主控模块的收发端口连接;摄像头模块的输出端与主控模块的数据端口连接;距离传感器与主控模块的信号采样端口连接;电源模块与各个模块和器件连接,用于供电。
11、作为优选方案:还包括声光报警器,所述声光报警器与主控模块的控制信号输出端连接。
12、作为优选方案:所述电源模块为ups电源。
13、作为优选方案:所述通信模块为rj45通信模块、wifi模块或物联卡通信模块。
14、与现有技术相比,本申请的技术方案具有以下有益技术效果:该系统依据横梁与跟行车辆之间的水平距离来判断跟行车辆是否有尾随出场意图,在判断出跟行车辆有尾随意图且识别到跟行车辆未缴费时,认为其有较大概率尾随出场逃费,此时系统自动将横梁调节至低于跟行车辆前挡风玻璃的高度,对跟行车辆进行拦截,使其尽量远离驶出车辆;在判断出跟行车辆有尾随意图且识别到跟行车辆已缴费时,为了避免跟车距离过近导致闸机无法拍摄到跟行车辆导致后期无法查询到该车辆的出场记录,此时系统自动将横梁调节至高于跟行车辆前机盖的高度且低于其前挡风玻璃上边缘的高度,对跟行车辆施加一定程度的拦截,又不会使其与前车距离过远而影响到通行效率。通过该系统可以有效解决停车场车辆出场尾随逃费的情况,提高停车场的管理水平。
技术特征:1.一种停车场防跟车尾随交通控制系统,包括设置于停车场出口处的闸机,其特征是:还包括设置于闸机后方的阻拦装置以及设置于阻拦装置后方的图像拍摄装置;所述阻拦装置为横跨道路的“门”形结构,所述阻拦装置包括一对竖向间隔设置的立柱,所述立柱的底部通过底座与地面固定,在立柱内侧设置有竖直的第一丝杆,第一丝杆的上端与立柱的上端转动连接,在第一丝杆的下端设置有第一电机,所述第一电机的壳体与立柱固定连接,所述第一电机的输出轴与丝杆的下端同轴连接,两立柱之间设置有横梁,在横梁的端部设置有螺纹孔,所述第一丝杆穿过螺纹孔并与螺纹孔适配;所述横梁上安装有用于后方的车辆图像的摄像头模块;所述阻拦装置还包括设置于横梁上方的测距机构,测距机构向横梁的后方伸出,在测距机构的后端安装有距离传感器,所述距离传感器朝向下方地面,用于检测下方的车辆;该系统还包括用于控制第一电机的控制器,所述距离传感器与控制器电连接;
2.根据权利要求1所述的停车场防跟车尾随交通控制系统,其特征是:所述测距机构包括中空的支撑筒和中空的伸缩杆,所述伸缩杆活动设置于支撑筒内,所述支撑筒的前端通过连接柱与横梁固定连接,所述伸缩杆的前端伸入到支撑筒内;所述距离传感器安装在伸缩杆的后端;所述支撑筒内的前端安装有第二电机,并在支撑筒内设置有第二丝杆,所述第二丝杆沿支撑筒的长度方向设置,所述伸缩杆的前端安装有螺纹套,所述第二丝杆的前端与第二电机的输出轴同轴连接,所述第二丝杆的后端穿过螺纹套并与螺纹套适配,所述第二丝杆的后端伸入到伸缩杆内,所述第二电机与控制器连接并受控制器控制;当摄像头模块拍摄到横梁后方的图像后,控制器对图像中的车辆特征进行识别,以识别并统计横梁后方排队等待出场的车辆数量;系统预先对排队等待车辆的数量区间与尾随判断距离的值进行标定,当控制器识别到排队车辆数量时,控制器判断数量落在哪一数量区间,再调取该数量区间对应的尾随判断距离的值,据此换算出距离传感器需要移动的行程,进而换算出第二电机所需的转动角度,接着控制器控制第二电机转动所需角度,从而将尾随判断距离调节至所需值。
3.根据权利要求1所述的停车场防跟车尾随交通控制系统,其特征是:对图像处理得到跟行车辆的三个特征点的实际高度的过程为,先将图像进行二值化处理,进行二值化处理后可以使车辆轮廓线清洗显现;随后对二值化图像中车辆上表面轮廓线的a、b、c三个特征点进行识别;对识别出三个特征点后对每个特征点进行标记;随后将标记后的二值化图像进行坐标化处理,图像的左下角即为坐标系的原点,再读取各个被标记的特征点的纵坐标值;最后根据拍摄装置拍摄图像的实际覆盖范围的高度和纵坐标值换算出三个特征点的实际高度。
4.根据权利要求2所述的停车场防跟车尾随交通控制系统,其特征是:所述控制器包括主控模块、第一驱动模块、第二驱动模块、存储模块、通信模块以及电源模块;其中第一驱动模块的输入端与主控模块的控制信号输出端连接,第一驱动模块的输出端与第一电机的控制端连接;第二驱动模块的输入端与主控模块的控制信号输出端连接,第二驱动模块的输出端与第二电机的控制端连接;存储模块与主控模块的数据读写端口连接;通信模块与主控模块的收发端口连接;摄像头模块的输出端与主控模块的数据端口连接;距离传感器与主控模块的信号采样端口连接;电源模块与各个模块和器件连接,用于供电。
5.根据权利要求4所述的停车场防跟车尾随交通控制系统,其特征是:还包括声光报警器,所述声光报警器与主控模块的控制信号输出端连接。
6.根据权利要求4所述的停车场防跟车尾随交通控制系统,其特征是:所述电源模块为ups电源。
7.根据权利要求4所述的停车场防跟车尾随交通控制系统,其特征是:所述通信模块为rj45通信模块、wifi模块或物联卡通信模块。
技术总结本发明涉及一种停车场防跟车尾随交通控制系统,该系统依据横梁与跟行车辆之间的水平距离来判断跟行车辆是否有尾随出场意图,在判断出跟行车辆有尾随意图且识别到跟行车辆未缴费时,认为其有较大概率尾随出场逃费,此时系统自动将横梁调节至低于跟行车辆前挡风玻璃的高度,对跟行车辆进行拦截,使其尽量远离驶出车辆;在判断出跟行车辆有尾随意图且识别到跟行车辆已缴费时,为了避免跟车距离过近导致闸机无法拍摄到跟行车辆导致后期无法查询到该车辆的出场记录,此时系统自动将横梁调节至高于跟行车辆前机盖的高度且低于其前挡风玻璃上边缘的高度,对跟行车辆施加一定程度的拦截,又不会使其与前车距离过远而影响到通行效率。通过该系统可以有效解决停车场车辆出场尾随逃费的情况,提高停车场的管理水平。技术研发人员:颜国顺,胡俊华受保护的技术使用者:武汉无线飞翔科技有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/319142.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表