一种用于刹车片的检测模型、分拣系统及分拣方法
- 国知局
- 2024-11-21 11:33:36
本发明属于工业产品识别分拣,具体是一种用于刹车片的检测模型、分拣系统及分拣方法。
背景技术:
1、随着我国经济和产业的迅速发展,人民生活水平也在不断提高,汽车已成为人们日常出行最常使用的交通工具。汽车产业高速化发展对刹车片的需求量也越来越大。在工业生产中,“高效准确快速生产”是一个很重要的话题,而人工产品识别及分拣容易受到疲劳、主观判断等因素的影响,从而影响生产效率。
2、目前,大多公司的生产线对刹车片的识别分拣还采用人工流水线检测,这样不仅仅会造成最终的分拣效率低,而且随着人工成本的上升,大量的人工流水线也会大大增加生产成本。
技术实现思路
1、为解决现有技术的不足,本发明提供一种用于刹车片的检测模型、分拣系统及分拣方法。本发明设计的检测模型为改进的yolov8-obb神经网络模型,提高检测速度和检测准确率。本发明设计的用于刹车片的分拣系统及分拣方法,基于检测模型,可以实现刹车片的快速分拣,提高刹车片的识别及分拣的效率。
2、本发明解决所述技术问题采用如下的技术方案:设计一种用于刹车片的检测模型,其特征在于,该检测模型基于改进的yolov8-obb神经网络模型,该检测模型的获得方法具体包括如下步骤:
3、第一步:获取含有c个类别的刹车片图像,首先对其进行尺寸归一化处理,然后利用标注工具进行人工标注标签,得到数据集;然后将此数据集中的每个类别中的图像按照预设数量比例分别划分到训练集和验证集;人工标注的标签包括刹车片的类别和位置信息,其中类别标签为从1到c的正整数,每一个数字对应一个类别,合计有c个类别;位置信息包括刹车片在图像中的中心点坐标和刹车片的宽度、高度以及旋转角度;
4、第二步:设计基于改进的yolov8-obb神经网络模型的检测模型构架
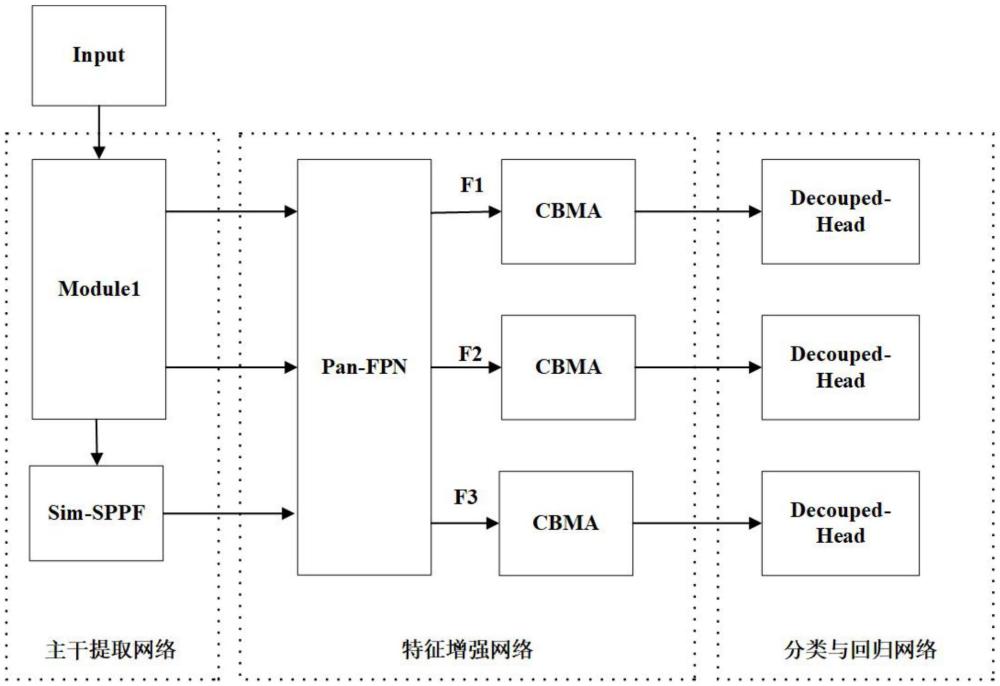
5、该检测模型的基本构架与yolov8-obb神经网络模型相同,均包括主干提取网络、特征增强网络和分类与回归网络三个部分,每个部分的基本构成也类似,区别点在于,检测模型的主干提取网络为将yolov8-obb神经网络模型的主干提取网络的sppf模块替换为sim-sppf模块而得,其余部分均相同,输入图像经过检测模型的主干提取网络,输出三个有效特征,其中两个有效特征的输出端口与yolov8-obb神经网络模型的主干提取网络的输出端口相同,第三个有效特征的输出端口为sim-sppf模块;
6、检测模型的主干提取网络输出的三个有效特征,输入到检测模型的特征增强网络;检测模型的特征增强网络为由yolov8-obb神经网络模型的特征增强网络部分的结构外加三个cbam模块所形成的结构,其中,检测模型的特征增强网络的数据输入端口与yolov8-obb神经网络模型的特征增强网络部分的数据输入端口相同,在yolov8-obb神经网络模型的特征增强网络部分的三个数据输出端口上再各连接一个cbam模块,即形成检测模型的特征增强网络;该三个cbam模块的输出即为检测模型的特征增强网络的三个输出;检测模型的分类与回归网络与yolov8-obb神经网络模型的分类与回归网络的结构相同;
7、sim-sppf模块为把yolov8-obb神经网络模型中的sppf模块的silu激活函数改为relu激活函数而得;
8、cbam模块是将通道注意力模块跟空间注意力模块进行串联而成的卷积注意力模块;cbam模块的具体工作流程如下:
9、输入到cbam模块中的特征f,首先输入到通道注意力模块中,分别经过全局最大池化和全局平均池化后,得到的结果再分别经过mlp处后,得到的两个结果再进行相加,然后对相加得到的特征通过sigmoid激活函数映射处理,得到通道注意力图mc,将其与特征f进行逐元素相乘得到特征f';
10、然后将特征f'输入到空间注意力模块中,分别经过全局最大池化和全局平均池化处理,将全局最大池化和全局平均池化处理的结果在通道维度拼接,再经过一个7×7的卷积及sigmoid激活函数映射处理,得到空间注意力图ms,将其与特征f'进行逐元素相乘,得到最终的卷积注意力图f”;具体计算公式如下:
11、
12、
13、
14、
15、其中,w0、w1分别表示mlp的两层权重,σ表示sigmoid激活函数,f7×7表示7×7的卷积操作,表示逐元素相乘;与avgpool(f)的含义相同,表示特征f经过通道注意力模块中的全局最大池化的处理结果,与maxpool(f)的含义相同,表示特征f经过通道注意力模块中的全局平均池化的处理结果;与avgpool(f')的含义相同,表示特征f'经过空间注意力模块中的全局最大池化的处理结果,与maxpool(f')的含义相同,表示特征f'经过空间注意力模块中的全局平均池化的处理结果;表示将与在通道维度进行拼接;
16、第三步:训练检测模型
17、针对第二步中的基于改进的yolov8-obb神经网络模型的检测模型构架,加载预训练权重参数文件,并采用随机赋值法初始化偏置参数,设置批处理大小设置为16,初始学习率设置为1×10-2,使用sgd优化器;epochs设置为500轮;将第一步中的训练集中的一个批次的刹车片图像输入到检测模型中,根据每张刹车片图像输出三个回归输出的特征和三个种类输出的特征,分别对其平铺堆叠,获得一个总的回归输出和一个总的种类输出;基于回归输出和种类输出,通过计算得到某类别预测框的置信度得分;对包含置信度得分的预测框,进行初始得分筛选以及非极大抑制处理,所得到的结果用于绘制最终的预测框,得到最终的刹车片的位置信息和类别信息;
18、利用一个批次的刹车片图像的训练损失的均值来更新一次检测模型的权重和偏置,完成一个批次的刹车片图片的的训练;将上一个批次训练完成时的网络参数作为下一个批次训练时的初始网络参数,不断重复,直至完成一个训练集中最后一个批次的刹车片图像的训练,完成一个轮次的训练;每完成一个轮次的训练,将第一步中的验证集中的刹车片图像依次输入到检测模型中,根据检测模型的输出计算完成本轮次训练时的检测模型对验证集中的刹车片图像的训练损失的均值;将上一个轮次训练完成时的网络参数作为下一个轮次训练时的初始参数,不断重复,直至连续10个轮次的验证集中的刹车片图像的训练损失的均值不变或者训练轮次达到最大值,则检测模型的训练完成,保存检测模型,即得用于刹车片的检测模型;
19、一张刹车片图像的训练损失的损失函数采用bbox_loss和cls_loss之和:
20、
21、其中,(x1,y1)为预测的刹车片中心点坐标;(x,y)为真实的刹车片中心点坐标;w1、h1为预测的刹车片宽度和高度;x、h为真实的刹车片宽度和高度;pc为真实类别概率分布,zc为检测模型在类别c上的原始输出值;λcooed是一个权重系数;zi是检测模型在i类上的输出值,i的取值范围为为1到c的正整数。
22、进一步的,设计一种用于刹车片的分拣系统,其特征在于,该分拣系统包括检测装置、物体传送装置、动作执行装置、上料设备;检测装置包含拍摄组件、显示装置,以及内部部署有如上所述的用于刹车片的检测模型的控制系统;拍摄组件包括工业相机和光源;控制系统与工业相机通信连接,用于获取工业相机采集的刹车片图像;显示装置与控制系统通信连接,用于显示对刹车片检测后得到的位置信息与类别信息;
23、物体传送装置是包含传送带和传送带驱动电机的设备,刹车片放置在传送带上;传送带在电机驱动下运动,从而将刹车片依次送到图像采集区域、动作执行区域;传送带驱动电机通过电机驱动器与控制系统通信连接;
24、动作执行装置是包括带有夹爪的并联机器人以及用于驱动该并联机器人的电机的装置;当刹车片到达动作执行区域时,并联机器人在电机驱动下运动,从而根据指令执行抓取、放置的操作;动作执行装置的电机通过电机驱动器与控制系统通信相连,用于根据控制系统的指令执行抓取、放置操作;
25、上料设备用于将刹车片放置在传送带上;其中,上料设备为带有夹爪的并联机器人和用于驱动该并联机器人的电机,夹爪用于抓取刹车片,并联机器人在电机的带动下将刹车片放置在传送带上;上料设备的电机通过电机驱动器与控制系统通信相连;
26、物体传送装置的传送带的长度方向的左、右两侧分别为刹车片的上料端与分拣端,上料设备与动作执行装置分别设置于上料端与分拣端,拍摄组件设置于传送带的靠近其上料端的一侧的后方,且工业相机的摄像头朝向传送带的一侧设置,位于工业相机的摄像头的正前方的传送带部分在工业相机的摄像头的拍摄视野范围内;
27、上料设备的上料落点位于传送带上,传送带的与工业相机的摄像头正对的区域为图像采集区域,传送带的与动作执行装置的夹爪正对的区域为动作执行区域,上料设备的上料落点与图像采集区域的中心点以及动作执行区域的中心点之间的水平距离为预设值。
28、进一步的,设计一种用于刹车片的分拣方法,该分捡方法通过如上所述的分拣系统实现,具体包括以下步骤:
29、步骤1:采集刹车片图像
30、利用上料设备将一块刹车片运送到上料落点,然后关停上料设备;根据传送带驱动电机的转速,得到一块刹车片到达工业相机的摄像头的中心点的正前方的时间,当刹车片到达工业相机的摄像头的中心点的正前方时,关停传送带驱动电机,工业相机对该刹车片进行拍摄,获得刹车片图像;
31、步骤2:获取检测结果
32、工业相机将步骤1中的刹车片图像发送给控制系统,控制系统利用其内部部署的用于刹车片的检测模型对该刹车片图像进行处理,得到该刹车片当前的位置信息和类别信息;
33、步骤3:分拣刹车片
34、开启传送带驱动电机,根据工业相机的摄像头的中心点与动作执行装置的抓取中心点之间的水平距离,计算出到达动作执行装置的抓取中心点的时间,当刹车片到达动作执行装置的抓取中心点时,关停传送带驱动电机;然后开启动作执行装置,根据控制系统发送的该刹车片的位置信息和类别信息,并联机器人在电机驱动下运动,根据其类别,分拣到对应类别的产品收集处,完成该刹车片的分拣。
35、与现有技术相比,本发明有益效果在于:本发明设计的检测模型为改进的yolov8-obb神经网络模型,提高检测速度和检测准确率。本发明设计的用于刹车片的分拣系统及分拣方法,基于检测模型,可以实现刹车片的快速分拣,比目前工业人工流水产线检测的分拣效率高、检测成本低、检测速度快、检测质量高。
本文地址:https://www.jishuxx.com/zhuanli/20241120/331776.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表