一种车间设备扫码巡检防作弊的方法、装置及系统与流程
- 国知局
- 2024-11-21 11:43:10
本发明涉及车间巡检、物联网的,尤其涉及一种车间设备扫码巡检防作弊的方法、装置及系统。
背景技术:
1、随着技术的发展,在各行各业机器设备的应用也越来越广泛,机器设备的参与度越来越高,极大提高了企业的生产效率,但是如果发生设备故障导致非正常运转或停机,会严重影响企业的生产进程,甚至发生安全事故。因此大多数企业均设有设备巡检机制,在石油石化企业,由于其高温高压、易燃易爆的工作环境,对安全管理要求极为严格,需要通过设备巡检来预防事故的发生;在制造业,尤其是大规模的生产线,需要定期巡检来预防设备故障,保证生产效率和产品质量;在化工行业,需要定期检查设备状态,预防化学泄漏等安全事故的发生。
2、设备的正常运转对于企业的生产起着至关重要的作用,设备巡检有助于企业实现更高效、更安全、更经济的生产运营。设备巡检不仅有助于保障设备的正常运行,也是企业持续改进和提高竞争力的重要环节。
3、为了确保工作人员的实际巡检行为,当前扫码巡检是成本最低的一种方式,但是普遍存在作弊的问题,即指定巡检人员将设备二维码拍照备份,通过扫码纸质二维码、加载照片等方式谎报巡检行为。
4、为了巡检机制切实有效的推行,亟需一种防止巡检作弊的有效方法。
5、现有解决巡检作弊的方法有以下几种方式:
6、1. 只能用微信扫一扫:巡检人员只能用微信扫一扫的功能扫码,不能从手机相册中找到二维码图片打开。这就避免了巡检人员提前保存好二维码图片,然后在别的地方操作。但是也存在弊端:无法避免打印出来的纸质二维码或存在其他终端的二维码的行为。
7、2. 限制扫码位置:系统获取巡检人员扫码时的实时位置,如果他不在指定区域内,那他就不能完成巡检。就像一个电子围栏,只有围栏内的人才能巡检。存在的弊端为:实时位置定位有误差,误差大于10米,不适用车间内多设备距离较近的情况;不适用厂房不同楼层的情况。
8、3. 动态二维码:用电子二维码代替纸质二维码,二维码定时更新,巡检人员每次扫码都是不同的二维码,只能到设备前扫码。存在的弊端为:电子二维码需要采购成本,保持电子设备正常运转需要电源,定时更换电池或重新布线。
9、4. 硬件蓝牙:将蓝牙小设备放置在二维码的附近,当扫这个二维码时,程序会自动寻找所绑定的设备是否在二维码现场附近,如果找到,说明是在现场,就能形成一条签到记录。存在的弊端为:配置蓝牙需要采购成本。
10、相关其他专利技术方案包括:
11、1. 中国专利cn202121310135.x公开了一种防止巡检作弊的双重定位系统,对巡检现场的各个点位进行巡检,该方案需要在每个点位设置一个nfc电子标签,通过pda手持器发送位置信息和gps系统发送pda手持器实时定位的双重定位方式,来判断规定巡检人员是否巡检作弊,解决传统巡检方式中巡检人员偷懒、不到现场巡检就在巡检报告上随意填写的问题。上述专利需配置多个硬件设备如pda、电子标签,增加采购成本,需要借用gps定位,不适用车间内多设备距离较近的情况,不适用厂房不同楼层的情况。
12、2. 中国专利cn202210044837.0公开了一种巡检检测方法和相关设备,该发明提供需要在巡检点安装蓝牙硬件,在巡检员进行巡检时,通过对终端内的巡检程序进行定位从而获取终端的真实位置,进而基于终端的真实位置确定巡检员是否存在巡检作弊,从而有效的发现巡检员的巡检作弊。上述专利也需配置多个硬件设备如蓝牙,增加采购成本,需要借用gps定位,不适用车间内多设备距离较近的情况,不适用厂房不同楼层的情况。
13、3. 中国专利cn202211493371.9公开了一种基于紫蜂通信的线路巡检管理方法、装置、设备及介质,该发明通过紫蜂通信网关与紫蜂通信模块近距离的通信特点,通过模块唯一标识,获取第一光交接箱标识和第一经纬度信息,通过位置对比防止巡检作弊。此专利需配置特定硬件设备,增加采购成本,需要借用gps定位,不适用车间内多设备距离较近的情况,不适用厂房不同楼层的情况,需要特定识别设备装置,为巡检人员记录填写设备故障增加难度。
技术实现思路
1、针对现有巡检方法需要增加硬件成本,不适用车间内多设备距离较近情况的技术问题,本发明提出一种车间设备扫码巡检防作弊的方法、装置及系统,不需要增加额外的硬件配置,节约成本,可以适用在设备较密集和有上下楼层的厂房车间环境。
2、为了达到上述目的,本发明的技术方案是这样实现的:一种车间设备扫码巡检防作弊的方法,其步骤如下:
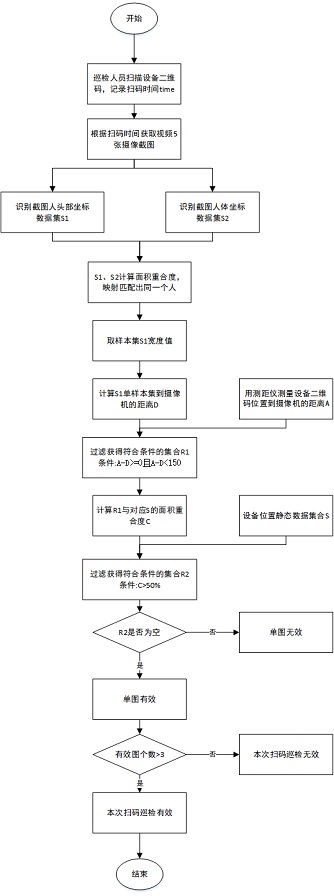
3、步骤一:利用摄像机获取无人巡检时监控范围内各个设备的初始图像,利用图像识别技术识别初始图像获得各个设备在初始图像中的位置坐标,组成设备位置静态数据集s;利用测距仪测量设备上二维码纸质标签的位置到摄像机的距离a;
4、步骤二:当巡检人员对设备上的二维码纸质标签进行扫码时,获取扫码时间n秒内摄像机采集视频中的至少n张摄像图像,利用图像识别技术分别识别摄像图像中巡检人员的头部和人体的位置坐标,获得头部位置数据集s1和人体位置数据集s2;
5、步骤三:计算头部位置数据集s1中每个样本分别与人体位置数据集s2中所有样本的面积重合度,根据面积重合度映射匹配出同一个巡检人员;
6、步骤四:根据头部位置数据集s1中每个头部的宽度计算巡检人员的头部到摄像机的距离distance,利用距离a与距离distance的差值筛选出符合条件的样本对应的摄像图像,组成样本集r1;
7、步骤五:计算样本集r1中样本映射匹配的同一个巡检人员的人体位置数据集s2中的样本与设备位置静态数据集s中设备的面积重合度,筛选出面积重合度在50%以上的样本组成集合r2;如果集合r2中的样本数量超过0.8n,巡检人员扫码巡检有效;否则巡检人员扫码巡检无效。
8、优选地,所述图像识别技术通过深度学习目标检测模型实现,所述深度学习目标检测模型为基于yolov5的深度学习目标检测模型,基于yolov5的深度学习目标检测模型是通过训练样本集x和样本集y训练得到的,所述训练样本集x中包括摄像机拍摄的多张现场图片,样本集y中包括需要巡检的设备的多张现场图片,训练样本集x中标注设备,样本集y中标注巡检人员的人体,样本集y中标注巡检人员的头部。
9、优选地,所述设备位置静态数据集s中每一条数据代表识别出的一个设备的位置坐标,位置坐标包括设备距离初始图像最上端的像素个数、距离初始图像最左侧的像素个数、设备的高度和设备的宽度;所述头部位置数据集s1中的位置坐标包括头部距离摄像图像最上端的像素个数、距离摄像图像最左侧的像素个数、头部的高度和头部的宽度,所述人体位置数据集s2中的位置坐标包括人体距离摄像图像最上端的像素个数、距离摄像图像最左侧的像素个数、人体的高度和人体的宽度。
10、优选地,所述步骤三中面积重合度的计算方法为:
11、1)已知头部位置数据集s1的头部和人体位置数据集s2的人体所在的两个矩形的左上角坐标和右下角坐标分别为(x1,y1)和(x2,y2)以及(a1,b1)和(a2,b2);那么两个矩形的重叠面积为:
12、m_coin=(min(x2,a2) - max(x1,a1)) * (min(y2,b2) -max(y1,b1));
13、2)头部的面积m_head=width*height=(x2-x1)*(y2- y1);
14、3)面积重合度=m_coin/m_head。
15、优选地,所述计算巡检人员的头部到摄像机的距离distance的方法为:获取头部位置数据集s1中的头部在摄像图像中的头部宽度m=width,取人实际头部宽度为15cm,根据摄像机成像原理公式,距离distance=人实际头部宽度15cm*摄像机焦距f/头部宽度m。
16、优选地,所述摄像机焦距f的计算方法是:选取初始图像中固定物体作为参照物,测量参照物的高度w,用测距仪测量参照物的高度中间位置到摄像机的距离d,测量在初始图像里消防栓的高度w,单位为像素;根据成像原理:w/w=d/f,得到摄像机焦距f=w*d/w,单位是像素;
17、要求巡检人员站在设备距离二维码纸质标签最近的一侧,正对二维码纸质标签进行扫码操作,手机扫码时人与二维码纸质标签的距离小于1米,并在原地填写当前设备巡检记录,且至少停留5秒。
18、优选地,所述距离distance与距离a的差值应小于150cm,根据a-distince>=0且a-distince<150筛选出符合条件的样本集r1。
19、优选地,将获取的人体的位置坐标和设备位置静态数据集s中设备的位置坐标进行比对,计算重叠面积,筛选出面积重合度在50%以上的样本组成集合r2;
20、若集合r2不为空则认为当前摄像图像的实际巡检有效,若集合r2为空则当前摄像图像认为实际巡检无效;同一台设备的5张摄像图像重复步骤四-步骤五,计算有效次数n1,如n1>0.8n则认为本次巡检有效,如n1<=0.8n则认为本次巡检无效。
21、一种车间设备扫码巡检防作弊的装置,包括摄像机和二维码纸质标签,二维码纸质标签固定在需要监控的设备上,摄像机设置在车间的上部,设备在摄像机的监控范围内,摄像机与边缘服务器相连接,边缘服务器与移动终端相连接,移动终端与设备上的二维码纸质标签相匹配,边缘服务器内的边缘网关内置模块执行所述的一种车间设备扫码巡检防作弊的方法。
22、一种车间设备扫码巡检防作弊的系统,包括边缘服务器,边缘服务器内设有边缘网关管理云平台,边缘网关管理云平台内设有图像获取模块、图像识别模块、数据计算模块、数据分析模块和巡检告警模块,其中,图像获取模块用于获取扫码时间后摄像机每秒采集的摄像图像,图像识别模块通过图像识别技术识别图像中设备、人或头部并提取设备、人或头部的位置坐标;数据计算模块分别用于计算头部位置数据集s1中头部和人体位置数据集s2中人体的面积重合度、面积重合度最高的人体位置数据集s2中人体与设备位置静态数据集s中设备的面积重合度以及头部位置数据集s1中头部与摄像机的距离,数据分析模块用于根据数据计算模块计算的结果筛选出符合条件的样本以及判断巡检是否有效,巡检告警模块用于根据数据分析模块的判断结果生成巡检操作无效的告警信息。
23、与现有技术相比,本发明的有益效果:
24、1. 本发明仅需部署计算程序应用,提供环境测量值即可实现预防巡检作弊的行为,无额外的硬件配置,如蓝牙、pda、电子标签等,更加节省成本。
25、2. 本发明可以适用在设备较密集的厂房车间环境,解决了定位方案误差较大,无法适用到密集车间的问题。
26、3. 本发明可以适用在有上下楼层的厂房车间环境,解决了定位方案无法区分,设备在不同楼层相同位置的问题。
27、本发明属于物联网领域,根据图片目标识别技术和摄像机成像原理,基于车间现有装备,通过距离测算方法,检验设备巡检有效性,防止扫码作弊的行为,保证企业设备的安全运营,减少事故发生,提高设备使用寿命;在不增设新硬件装置的情况下,减少成本支出,解决了现有技术方案普遍采用的定位无法识别楼层的情况。本发明具体表现在:
28、1. 根据摄像机成像原理,计算人头部在空间上距离摄像机的距离,对比已知二维码标签与摄像机的空间距离,从而判断设备与人在相近球面的方法,确定人到摄像机的位置与设备到摄像机的距离接近。
29、2. 使用图片目标识别技术,计算人头部坐标与设备坐标重合度,管理要求人的位置在设备和摄像机之间,确定人和设备相对与摄像机在近似角度的方法,确定人、摄像机、设备在同一条直线上。
30、3. 通过获取扫码后多张图现场照片,重复计算,多次验证,从而避免有其他人路过导致结果异常的情况。
31、4. 通过固有参照物长度值自动计算焦距,当出现摄像机转向或焦距变化时,立即触发焦距数值矫正的方法,避免因焦距变化导致计算误差的情况。
32、5. 通过图片目标识别技术和摄像机成像原理判断巡检人是否在设备附近,解决定位误差以及定位无法判断厂房多楼层的问题。
本文地址:https://www.jishuxx.com/zhuanli/20241120/332562.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。