一种微型自解耦三维力传感器
- 国知局
- 2024-11-21 11:50:46
本发明属于多维力传感器领域,尤其涉及一种微型自解耦三维力传感器。
背景技术:
1、随着科技的发展,三维力的测量越来越受到重视,其相关技术可以应用到诸多领域,其中最广泛的便是智能机器人力感知,能够同时测量剪切力和法向力的三维力传感器可以辅助机器人完成各种复杂的操作,提高机器人的控制能力,帮助机器人实现与外界环境的交互。特别是在机器人灵巧手的开发过程中,能够嵌入到机器人手指中的微型三维力传感器至关重要。微型三维力传感器在微创手术、针灸、触诊等多个领域也发挥着重要作用。这些场景要求传感器具有较小的尺寸,一体集成的结构便于整个系统的集成。当前基于电阻应变片/硅应变片的三维力传感器技术较为成熟,但是其小型化集成化难以实现,且其应变片的粘贴较为复杂,导致其成本较高。而对于基于光纤布拉格光栅(fbg)的微型三维力传感器尺寸能够做到很小,适合对于微小力的测量,但是其信号处理模块复杂价格昂贵,体积较大。还有一些基于电容测量原理的微型三维力传感器,具有灵敏度高、温度稳定等特点,但是容易受到环境湿度和灰尘的影响。这些不同原理三维力传感器都需要较为复杂的标定解耦,才能将敏感元件的电信号转换为输出力信号,但是对于微型三维力传感器,其尺寸较小,传感器的固定和标定加载较为困难,需要开发专门的标定设备实现三维力的标定解耦。
2、因此,目前迫切需要具有自解耦特性的微型三维力传感器,用于人形机器人灵巧手、生物医疗仪器等对尺寸严格限制的场合。
技术实现思路
1、为了解决多维力传感器轴间耦合大、标定解耦复杂等问题,本发明提供基于电涡流效应的微型自解耦三维力传感器,其基于位移测量法,微型自解耦三维力传感器的三个线圈和对应的三个金属膜采用三维正交的结构布置,通过这种巧妙的布置方式能够实现传感器对三维位移的同时监控,且具有很小的耦合,再借助中间弹性体从而实现三维位移到三维力的转变。微型自解耦三维力传感器的电感测量模块通过折叠的结构集成在传感器内部,实现了一体集成自解耦的功能。
2、为达到上述目的,本发明采用如下技术方案:
3、一种微型自解耦三维力传感器,包括外壳、电感测量模块、数据通讯线、线圈lz、线圈lx、线圈ly、弹性体、底座、z轴方向金属膜、x轴方向金属膜、y轴方向金属膜;线圈lz、线圈lx、线圈ly以三维正交结构进行布置,固定在底座的三个相互正交的平面上;z轴方向金属膜、x轴方向金属膜、y轴方向金属膜固定于外壳的内侧,以三维正交结构进行布置,与线圈lz、线圈lx、线圈ly一一对应;电感测量模块采用柔性电路板工艺加工,以折叠的形状布局固定在底座的三个相互正交的平面及底面以外的两个平面上,外壳和底座通过中间弹性体连接成一个整体;弹性体将外壳承受的三维力转换为三维位移;所述数据通讯线穿出底座的底面;以三维正交结构布置的线圈lz、线圈lx、线圈ly以及对应的三维正交结构布置的z轴方向金属膜、x轴方向金属膜、y轴方向金属膜共同实现传感器自解耦特性。
4、可选的,z轴方向金属膜、x轴方向金属膜、y轴方向金属膜是三片相互分离的金属膜。
5、可选的,z轴方向金属膜、x轴方向金属膜、y轴方向金属膜的材料为导电材料。
6、可选的,所述外壳采用非导电性性材料。
7、可选的,电感测量模块以折叠成90度的形式集成到外壳的内部。
8、可选的,所述电感测量模块用于测量三个线圈的电感。电感的变化由金属膜与线圈之间的距离变化而产生,电感值用于测量金属膜相对于线圈的位置。
9、可选的,金属膜为铜、铝、金、银及其合金等导电金属材料。
10、可选的,电感测量模块集成到传感器的内部,保证了传感器的一体集成,减小外界环境对电感测量模块的影响。
11、可选的,外壳和底座通过弹性体连接到一起,从而保证了外壳的位移能够转换为传感器承受的力。
12、可选的,三个线圈可以选择铜等金属导线绕制的线圈,或者其它印刷电路板线圈,且其形状可以是圆形、正方形、三角形等二维或三维形状。
13、可选的,金属膜的尺寸大于线圈的尺寸,三个线圈分别与相互平行的金属膜产生强电磁耦合,与三维正交的金属膜产生弱电磁耦合。三个线圈分别监控一个轴的位移,三轴之间具有很小的耦合,从而实现传感器本身自解耦的特性。采用三维正交形式的结构布局大大减小了传感器的整体尺寸。
14、三个相互正交的线圈通过涡流效应分别检测与之平行的金属膜的位移。弹性体将施加在外壳上的三维力转化为三维位移。相互平行的线圈和金属膜之间具有随位移变化的强耦合,线圈只对与之平行的金属膜的法向位移敏感,与其它方向的位移不敏感,因此该传感器在测量xyz轴三个方向上的力输出时的原始数据具有很低的轴间耦合,无需复杂的标定解耦。
15、有益效果:
16、本发明是一种基于三维位移测量原理的三维力传感器,结构紧凑,巧妙的三维正交布局让传感器兼具很小的尺寸和三维力自解耦特点,且折叠的电感测量模块也进一步提高了传感器本身的集成特性。本发明的基本原理是线圈中的高频交流电会在金属膜中产生电涡流效应,从而改变线圈的电感值,电感值随着金属膜和线圈之间的距离的变化而变化。而传感器本身自解耦的特性则是由于线圈与其相互平行的金属膜之前的耦合较为强烈,线圈与其相互垂直的金属膜之间具有很弱的耦合。
17、本发明通过对三维位移的测量实现三维力的测量,传感器的样机的尺寸大小为9.8mm×9.8mm×9.8mm,法向力fz量程达到10 n,剪切力fx,fy量程达到5n。传感器的输出串扰低于满量程的3%。同时该传感器的弹性体也可选用金属等刚性材料提高传感器的量程,也可以选择柔性硅胶等材料,提高传感器刚冲击的能力。该传感器能很好的集成到机器人灵巧手指尖,为机器人灵巧手提供力感知,帮助机器人进行各种复杂的操作。
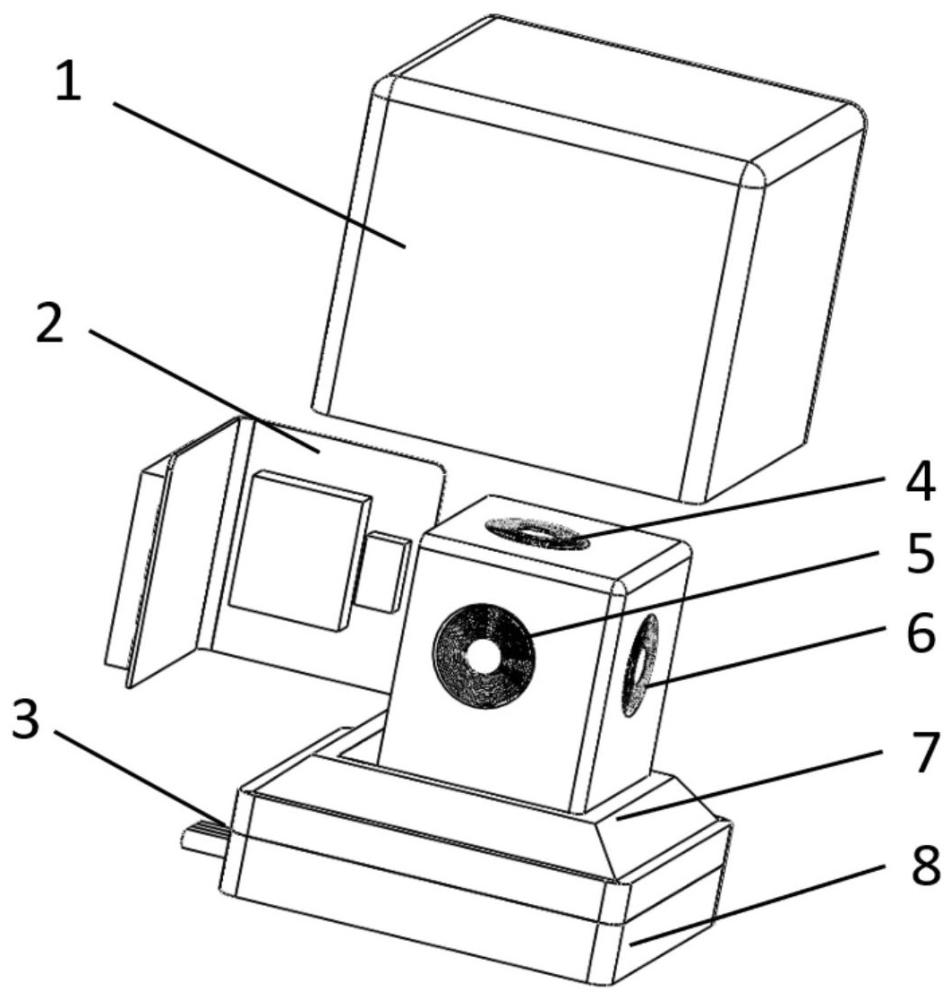
技术特征:1.一种微型自解耦三维力传感器,其特征在于,包括外壳(1)、电感测量模块(2)、数据通讯线(3)、线圈lz(4)、线圈lx(5)、线圈ly(6)、弹性体(7)、底座(8)、z轴方向金属膜(9)、x轴方向金属膜(10)、y轴方向金属膜(11);线圈lz(4)、线圈lx(5)、线圈ly(6)以三维正交结构进行布置,固定在底座(8)的三个相互正交的平面上;z轴方向金属膜(9)、x轴方向金属膜(10)、y轴方向金属膜(11)固定于外壳(1)的内侧,以三维正交结构进行布置,与线圈lz(4)、线圈lx(5)、线圈ly(6)一一对应;电感测量模块(2)采用柔性电路板工艺加工,以折叠的形状布局固定在底座(8)的三个相互正交的平面及底面以外的两个平面上,外壳(1)和底座(8)通过中间弹性体(7)连接成一个整体;弹性体(7)将外壳(1)承受的三维力转换为三维位移;所述数据通讯线(3)穿出底座(8)的底面;以三维正交结构布置的线圈lz(4)、线圈lx(5)、线圈ly(6)以及对应的三维正交结构布置的z轴方向金属膜(9)、x轴方向金属膜(10)、y轴方向金属膜(11)共同实现传感器自解耦特性。
2.根据权利要求1所述的一种微型自解耦三维力传感器,其特征在于,所述z轴方向金属膜(9)、x轴方向金属膜(10)、y轴方向金属膜(11)是三片相互分离的金属膜或是一个整体。
3.根据权利要求1所述的一种微型自解耦三维力传感器,其特征在于,所述z轴方向金属膜(9)、x轴方向金属膜(10)、y轴方向金属膜(11)的材料为导电材料,所述导电材料包括铜、铝、银、金及其合金。
4.根据权利要求1所述的一种微型自解耦三维力传感器,其特征在于,所述外壳(1)采用非导电性材料。
5.根据权利要求1所述的一种微型自解耦三维力传感器,其特征在于,所述电感测量模块(2)以折叠成90度的形式固定到底座(8)上。
6.根据权利要求1所述的一种微型自解耦三维力传感器,其特征在于,所述电感测量模块用于线圈lz(4)、线圈lx(5)、线圈ly(6)的电感的测量。
7.根据权利要求1所述的一种微型自解耦三维力传感器,其特征在于,所述线圈lz(4)、线圈lx(5)、线圈ly(6)为采用金属导线绕制的线圈或者为印制电路板线圈,形状为二维或三维。
技术总结本发明提出一种微型自解耦三维力传感器,涉及多维力传感器领域,由电感测量单元、线圈、金属膜、弹性体、底座、外壳组成。所述线圈以三维正交布局固定于底座,所述电感测量模块以折叠结构固定于底座,所述金属膜以三维正交布局固定在外壳内表面,所述弹性体将施加在外壳上的三维力转化为三维位移。三个相互正交的线圈通过涡流效应分别检测与之平行金属膜的位移。相互平行的线圈和金属膜之间具有随位移变化的强耦合,线圈只对与之平行的金属膜的法向位移敏感,与其它方向的位移不敏感,因此该传感器在测量xyz三个方向上的力输出时的原始数据具有很低的轴间耦合,无需复杂的标定解耦。本发明解决了多维力传感器轴间耦合大、标定解耦复杂的问题。技术研发人员:王洪波,徐迎澳,王思铎,吴后平,常新新受保护的技术使用者:中国科学技术大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332992.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表