一种空天基有无源探测系统协同资源调度方法及系统与流程
- 国知局
- 2024-11-21 12:01:56
所属的技术人员知道,本技术可以实现为系统、方法或计算机程序产品。因此,本公开可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本技术还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是一一但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。在此基础上,可以对本技术进行多种替换和改进,这些均落入本技术的保护范围内。
背景技术:
1、当前战场态势复杂,空中目标作战活动频繁、战术战法多变。现有侦察预警系统主要依赖地基雷达网的常态化预警能力,资源协同主要采用以事先预案为主、计算机辅助支持的模式,灵活性差、调度粒度粗,指挥中心既不具备对网内节点的自动监视和控制能力,也无智能化辅助决策支持,难以实现节点间协同作战。为了高效探测空中隐身、低空突防目标,迫切需要以信息保障需求为牵引,综合利用卫星、浮空艇和无人机,并根据任务、环境和目标的变化自适应调整系统内各装备的工作模式和参数,使各资源高效协同工作。
技术实现思路
1、本技术提供了一种空天基有无源探测系统协同资源调度方法及系统,用以提升目标的跟踪精度,从而节省发射功率资源。
2、第一方面,提供了一种空天基有无源探测系统协同资源调度方法,包括以下步骤:
3、建立空天基有无源探测系统的系统模型;
4、根据所述系统模型,确定跟踪性能测度以及估计目标状态;
5、基于跟踪性能测度和预设约束条件,构造资源调度模型;
6、求解所述资源调度模型,得到资源调度结果。
7、在上述技术方案中,构建有无源探测系统协同资源调度数学模型,有无源探测系统包括自发它收系统(卫星发浮空艇和无人机收)和自发自收系统(无人机)系统;自发它收探测系统为自发自收探测系统提供先验信息,引导无人机群以最大化目标跟踪精度为目的优化航迹;当目标进入自发自收系统的探测区域后,无人机群通过联合功率管理和航迹规划实现隐蔽条件下对目标的保精度跟踪,提升了目标的跟踪精度,节省了功率资源。
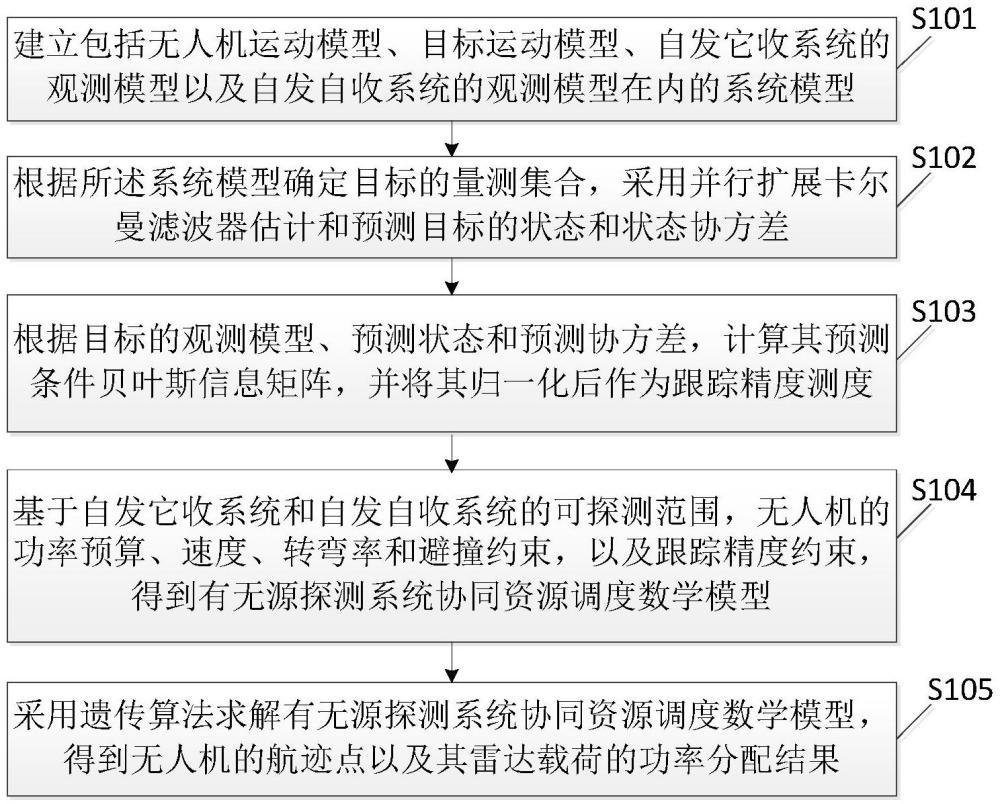
8、在一个具体可实施方案中,所述系统模型包括无人机运动模型、目标运动模型、自发它收系统的观测模型以及自发自收系统的观测模型。
9、在一个具体可实施方案中,所述跟踪性能测度包括目标的量测集合,所述估计目标状态包括目标的状态和状态协方差;根据所述系统模型,确定跟踪性能测度以及估计目标状态的步骤,具体为:
10、首先根据所述系统模型确定目标的量测集合;
11、然后基于所述目标的量测集合,采用并行扩展卡尔曼滤波器估计和预测目标状态及状态协方差。
12、在一个具体可实施方案中,
13、所述预设约束条件包括自发它收系统和自发自收系统的可探测范围,无人机的功率预算、速度、转弯率和避撞约束;基于跟踪性能测度和预设约束条件,构造资源调度模型的步骤,具体为:
14、根据所述系统模型中目标的观测模型、所述目标的状态和所述预测协方差,计算目标的预测条件贝叶斯信息矩阵,并将其归一化后作为目标跟踪精度测度;
15、基于自发它收系统和自发自收系统的可探测范围,无人机的功率预算、速度、转弯率和避撞约束,以及所述目标跟踪精度测度,得到有无源探测系统协同资源调度数学模型。
16、在一个具体可实施方案中,所述资源调度结果包括无人机的航迹点以及其雷达载荷的功率分配结果;求解所述资源调度模型,得到资源调度结果的步骤,具体为:
17、采用遗传算法求解所述有无源探测系统协同资源调度数学模型,得到无人机的航迹点以及其雷达载荷的功率分配结果。
18、在一个具体可实施方案中,
19、无人机n的运动模型为:
20、pn,k=pn,k-1+vn,kt0,vn,k∈vn,k (1)
21、其中,pn,k=(xn,k,yn,k,zn,k)t和分别表示无人机n在融合时刻tk的位置和速度,xn,k,yn,k,zn,k分别表示无人机n在融合时刻tk在x轴、y轴和z轴的位置坐标,分别表示无人机n在融合时刻tk在x轴、y轴和z轴的速度坐标,表示速度集合,||·||2表示2范数,表示最大速度;
22、假设目标作近匀速直线运动,其在融合时刻tk的状态为其中和分别表示位置和速度,xk,yk,zk分别表示目标在x轴、y轴和z轴的位置坐标,分别表示目标在x轴、y轴和z轴的速度坐标,目标的运动模型为:
23、ξk=fk-1ξk-1+wk-1 (3)
24、其中,fk-1表示状态转移矩阵;wk-1表示过程噪声。
25、在一个具体可实施方案中,目标的预测状态xk|k-1和预测协方差pk|k-1为
26、
27、其中,和分别表示上一时刻目标的估计状态和估计协方差;
28、目标的估计状态和估计协方差为
29、
30、其中,表示卡尔曼增益,表示新息,表示新息协方差的逆矩阵。
31、在一个具体可实施方案中,
32、目标的预测条件贝叶斯信息矩阵为
33、
34、其中,求和的第一部分为自发它收系统的信息量,求和的第二部分是自发自收系统的信息量,表示卫星发无人机或者浮空艇收对目标的可见性参数,bn,k无人机自发自收对目标的可见性参数,表示预测量测协方差,表示预测剩余参数矩阵,hn,k(pn,k)和分别表示自发它收和自发自收系统的预测雅克比矩阵;
35、目标的归一化预测条件贝叶斯克拉美罗界(pc-crlb)的迹为
36、g(rk,pk)=tr(λtj-1(xk|z1:k-1)λ) (14)
37、其中,无人机对目标的功率向量为位置向量为表示归一化矩阵,tr(·)表示求迹。
38、在一个具体可实施方案中,
39、第一阶段的资源调度模型为:
40、ming(rk,pk)
41、
42、其中,第一个约束为无人机的最大速度和最大转弯率约束,第二个约束表示任意两个无人机n1和n2需要保持一定的安全距离dcol;
43、第二阶段的资源调度模型为:
44、min||rk||1
45、
46、其中,||·||1表示1范数,rk=[r1,k,r2,k,...,rn,k]表示功率优化变量,表示第n个无人机的总功率,第二个约束为目标的跟踪精度,需满足精度需求ηk。
47、第二方面,提供了一种空天基有无源探测系统协同资源调度系统,包括:
48、系统模型建模模块,用于建立空天基有无源探测系统的系统模型;
49、跟踪性能测度模块,用于根据所述系统模型,确定跟踪性能测度并估算目标状态估计精度;
50、资源调度模型构造模块,用于基于跟踪性能测度和预设约束条件,构造资源调度模型;
51、资源调度模型求解模块,用于求解所述资源调度模型,得到资源调度结果。
52、在上述技术方案中,通过构建有无源探测系统协同资源调度数学模型,有无源探测系统包括自发它收系统(卫星发浮空艇和无人机收)和自发自收系统(无人机)系统;自发它收探测系统为自发自收探测系统提供先验信息,引导无人机群以最大化目标跟踪精度为目的优化航迹;当目标进入自发自收系统的探测区域后,无人机群通过联合功率管理和航迹规划实现隐蔽条件下对目标的保精度跟踪,提升了目标的跟踪精度,节省了功率资源。
本文地址:https://www.jishuxx.com/zhuanli/20241120/333948.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表