基于帧差与时空图像测速的非接触测流方法及计算机装置
- 国知局
- 2024-12-06 12:14:45
本发明涉及河道流量测量领域,具体涉及一种基于帧差与时空图像测速的非接触测流方法及计算机装置。
背景技术:
1、stiv(space-time image velocimetry,时空图像测速)主要通过河岸一侧相机拍摄的水面视频合成时空图像,通过不同的方法估算纹理角度,从而估算河道表面流速,算法效率是互相关的10倍以上,因此近年来被广泛应用于河道流速测量。
2、由于stiv方法的精度主要依赖于时空图像纹理的清晰程度和角度检测的准确性,对于河道断面较规整、非汛期流速流量较小的河道,水面平静,产生波纹、泡沫等示踪不明显,导致时空图像纹理相较于流量较大的汛期河流不明显,极大的影响了纹理主方向的检测,从而影响河流流量测量的稳定性和准确性。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种基于帧差与时空图像测速的非接触测流方法及计算机装置,极大地提高了河流流量测量的稳定性和准确性。
2、本发明采取如下技术方案实现上述目的,第一方面,本发明提供一种基于帧差与时空图像测速的非接触测流方法,包括:
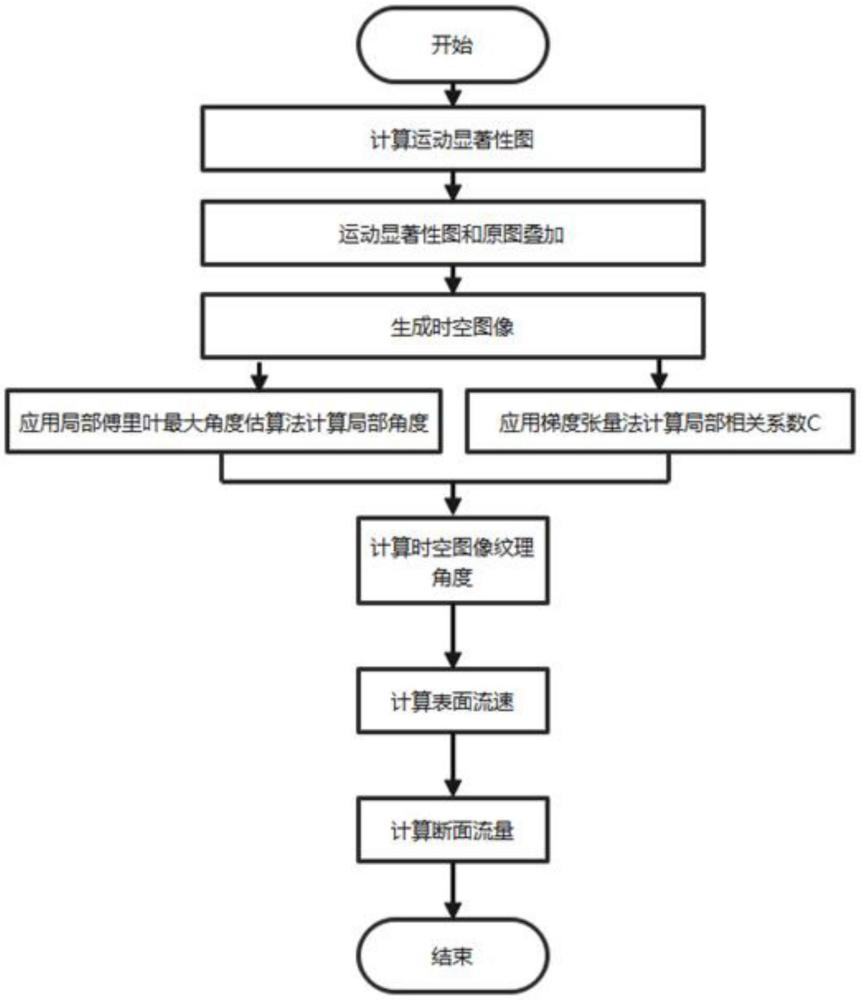
3、s1、利用视频序列中连续帧河流表面原始图像生成水流运动显著性图,并与河流表面原始图像进行叠加,得到水流图像;
4、s2、根据水流图像生成时空图像;
5、s3、通过局部傅里叶最大角度估算法计算局部纹理角度,通过梯度张量法计算局部相关系数c;
6、通过局部傅里叶最大角度估算法计算局部纹理角度:
7、将时空图像经过二维傅里叶变换生成光谱图像,并得到傅里叶光谱的主方向θm,主方向θm与时空图像的纹理主方向δ满足以下正交关系:δ=θm+90°;
8、二维傅里叶变换用下式表示:
9、
10、式中,h(x,t)是时空图像;f(u,v)是图像的傅里叶变换;m,n是图像的高度与宽度;
11、将频谱中心方向为水平和竖直的直线上的幅值置为0,滤波器设为椭圆并作为积分区域,长轴和短轴分别n/8和2个像素,在0°—180°范围内进行积分,即可得到光谱主方向θm,再通过正交关系计算出纹理主方向δ;
12、通过梯度张量法计算局部相关系数c:
13、局部相关系数c的计算公式如下:
14、
15、和分别表示图像沿着x方向、t方向变化的梯度,a表示积分区域;
16、δx为灰度图的一个单位像素;
17、s4、根据局部纹理角度与局部相关系数c计算平均纹理角度;
18、将时空图像分为多干矩形区域,通过步骤s3的方法计算出各个矩形区域的局部纹理角度与局部相关系数c,则:
19、θi表示各个矩形区域的局部纹理角度,表示平均纹理角度;
20、s5、根据平均纹理角度计算河流表面的流速及流量。
21、进一步的是,s2生成时空图像后,还包括对生成的时空图像进行预处理,具体包括:
22、使用修正阿尔法均值滤波器对生成的时空图像去噪,修正阿尔法均值滤波是在时空图像f(x,t)像素邻域中,删除d个最小值和d个最大值,计算剩余像素gr(r,c)的算数平均值,用下式表示:
23、式中:m,n表示滤波器的尺寸,sr表示矩形邻域,d的取值范围是(0,mn/2-1);
24、使用钝化掩蔽增强去噪后的时空图像,方式如下:
25、fmask(x,t)=f(x,t)-fsmooth(x,t),fsmooth表示时空图像的平滑图像,fmask表示钝化掩蔽图像;
26、h(x,t)=f(x,t)+kfmask(x,t),k表示预设定的权值,k>1;h(x,t)表示钝化掩蔽增强后的时空图像。
27、进一步的是,s1具体包括:
28、视频序列中第n帧和第n-1帧的图像为fn和fn-1,对应像素点的灰度值记为fnx,y和fn-1x,y,n时刻的运动显著性图为dn,dnx,y为dn的元素,则有:
29、
30、式中:h为预设定的阈值;k1,k2为预设定的系数,分别设定为大于1和小于1的值;
31、生成运动显著性图dn后,与河流表面原始图像进行叠加,得到水流图像rn,rnx,y为rn的元素,则有:
32、
33、进一步的是,s2具体包括:
34、以设定的时间间隔δt获取n帧水流图像序列,然后平行于水流运动方向设置测速线,测速线的宽度为1像素,长度为l像素,逐帧提取各测速线的灰度,并按照从上往下的顺序进行排列,合成大小为l×n像素的时空图像。
35、进一步的是,s5具体包括:
36、若河流表面流动特征沿着测速线运动的距离为d,时间为t,对应于像素运动k帧内运动了i个像素,则测速线的平均流速大小为:
37、
38、式中:表示平均纹理角度,sx表示每个像素所代表的实际距离,fps表示相机的帧率;
39、垂线平均流速v用下式表示:v=η·v表面,η表示表面流速系数;
40、最后根据流速面积法计算得到流量,计算方式如下:
41、vi表示区间垂线平均流速,ai表示区间面积。
42、第二方面,本发明提供一种计算机装置,包括存储器,所述存储器存储有程序指令,所述程序指令运行时,执行上述所述的基于帧差与时空图像测速的非接触测流方法。
43、本发明的有益效果为:
44、本发明利用连续帧原始图像计算出水流运动显著性图,并与原始图像进行叠加,得到带有明显示踪的图像,降低了因河道表面示踪不足,从而导致时空图像纹理不清晰或者缺失带来的影响。
45、本发明对时空图像应用局部傅里叶最大角度估算法进行角度分析,并引入相关性参数,最后根据整个时空图像局部获得的方向角度和相关性参数来计算平均方向角度,提高了纹理角度测算的鲁棒性。
46、本发明对生成的时空图像进行预处理,通过修正阿尔法均值滤波器去噪,以及通过钝化掩蔽增强图像,提高了图像纹理的清晰度。
技术特征:1.基于帧差与时空图像测速的非接触测流方法,其特征在于,包括:
2.根据权利要求1所述的基于帧差与时空图像测速的非接触测流方法,其特征在于,s2生成时空图像后,还包括对生成的时空图像进行预处理,具体包括:
3.根据权利要求1所述的基于帧差与时空图像测速的非接触测流方法,其特征在于,s1具体包括:
4.根据权利要求1所述的基于帧差与时空图像测速的非接触测流方法,其特征在于,s2具体包括:
5.根据权利要求1所述的基于帧差与时空图像测速的非接触测流方法,其特征在于,s5具体包括:
6.一种计算机装置,包括存储器,所述存储器存储有程序指令,其特征在于,所述程序指令运行时,执行如权利要求1-5任意一项所述的基于帧差与时空图像测速的非接触测流方法。
技术总结本发明涉及河道流量测量领域,具体涉及一种基于帧差与时空图像测速的非接触测流方法及计算机装置,极大地提高了河流流量测量的稳定性和准确性。技术方案包括:利用视频序列中连续帧河流表面原始图像生成水流运动显著性图,并与河流表面原始图像进行叠加,得到水流图像;根据水流图像生成时空图像;通过局部傅里叶最大角度估算法计算局部纹理角度;通过梯度张量法计算局部相关系数C;根据局部纹理角度与局部相关系数C计算平均纹理角度;根据平均纹理角度计算河流表面的流速及流量。本发明适用于对河道流量进行高精度测量。技术研发人员:赵勤霞,顾声龙,黄跃飞,吴玉帅,于腾,任倩慧,柏文文,康倍铭,岳生娟,石旭芳,王生春受保护的技术使用者:青海大学技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340195.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。