一种潮汐区承台施工围堰防渗监测方法与流程
- 国知局
- 2025-01-17 12:58:49
本发明涉及水利工程与海洋工程领域,具体属于围堰施工监测与防渗管理。
背景技术:
1、潮汐区围堰是水利工程和海洋工程中常见的临时结构,其主要作用是在潮汐影响区域内为施工提供干燥的作业环境。由于潮汐区的特殊地理条件,围堰不仅需要承受外部水压的作用,还需应对潮汐高度、浪高和海流速度的周期性变化,这使得围堰的稳定性和防渗性面临极大挑战。
2、在实际应用中,围堰的防渗性能对工程的顺利进行和施工安全至关重要。如果围堰发生渗漏,可能导致内部施工区域被水侵入,甚至引发围堰坍塌,严重威胁施工人员安全并增加工程成本。因此,如何对围堰进行实时、精准的防渗监测和状态评估,是当前工程领域亟待解决的重要技术难题。
3、传统的围堰监测方法多依赖人工检查或简单的单一传感器监测。人工检查不仅耗时费力,还存在主观判断误差,而单一传感器无法全面反映围堰的整体状态。随着计算机视觉和深度学习技术的快速发展,为围堰防渗监测提供了新的解决方案。
技术实现思路
1、本发明提出了一种潮汐区承台施工围堰防渗监测方法,该方法不仅能够通过图像识别技术监测围堰表面的异常情况,还利用水压传感器检测围堰外部的压力变化,并通过人工智能算法预测未来水压变化,从而更全面地评估围堰的防渗状态。
2、为此,本发明采用的技术方案如下:
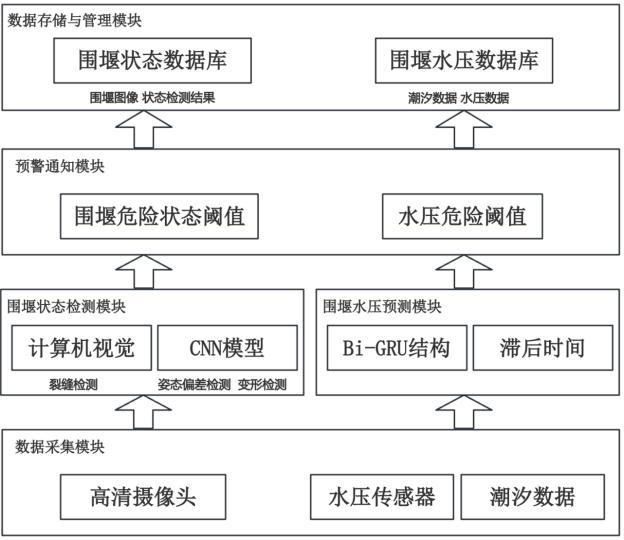
3、s1、采集围堰表面的高清图像数据,采集围堰水压时间序列,采集潮汐数据,包括潮汐高度、浪高和海流速度,潮汐数据和围堰水压数据的时间戳同步;
4、s2、通过计算机视觉和深度学习算法对采集到的高清图像数据进行识别,判断围堰是否出现导致渗漏的因素,包括裂缝检测、姿态偏差检测和变形检测;
5、检测围堰裂缝的长度和宽度,检测围堰姿态偏差的旋转角度和平移量,检测围堰是否变形;
6、s3、构建深度学习模型,使用采集到的潮汐数据和围堰水压数据,预测未来一段时间的围堰水压;
7、s4、设置裂缝长度和宽度危险阈值、旋转角度和平移量危险阈值,当裂缝检测和姿态偏差检测结果超过所设阈值或变形检测结果为凸起和凹陷则立即触发预警机制;
8、设置围堰水压危险阈值,立即触发预警机制;
9、s5、建立围堰状态数据库,将围堰的高清图像数据和围堰状态检测结果存储在数据库中,
10、建立围堰水压数据库,将水压传感器数据和当地潮汐数据以及未来的围堰水压预测结果存储在数据库中,定期使用最新的水压数据和潮汐数据更新s3中的深度学习模型参数。
11、进一步的,对高清图像数据识别前,还通过灰度化、平滑滤波和直方图均衡化对图像数据预处理,灰度化具体为,
12、灰度化是将原始图像中的三颜色通道(rgb)值求平均得到一个灰度值,公式为:
13、
14、其中,表示灰度化图像第i行第j列的像素灰度值,表示原始高清图像的第i行第j列的r值,表示原始高清图像的第i行第j列的g值,表示原始高清图像的第i行第j列的b值;
15、进一步的,所述平滑滤波是使用高斯函数作为权重来计算像素及其邻域像素的加权平均值,高斯函数的形状由其标准差σ控制,对于一个给定的像素位置(i,j),其平滑滤波后的灰度值sf_gray(i,j)通过以下公式计算:
16、
17、其中,w是以(i,j)为中心的邻域窗口,窗口大小为 k*l,是高斯函数的值,定义为:
18、
19、进一步的,所述直方图均衡化是通过调整图像的直方图分布,增强图像的对比度,其映射函数使用累计分布函数,公式为:
20、
21、其中l是灰度级总数,m和n分别是图像的长度和宽度,是直方图均衡化后第(i,j)个灰度级的像素数。
22、进一步的,所述裂缝检测具体步骤为,
23、1)对于所述预处理后的图像中的每个像素,分别与gi和gj进行卷积,得到水平方向梯度近似值ii和垂直方向梯度近似值ij,公式如下,
24、
25、其中表示二维卷积操作,gi和gj是sobel算子;
26、2)计算出每个像素的梯度幅值和梯度方向,梯度幅值表示边缘的强度,而梯度方向表示边缘的方向,公式如下,
27、
28、3)对梯度幅值图像m(i, j)进行非极大值抑制,具体是将量化到四个主要方向之一,分别为水平、垂直、对角线、反对角线,根据量化后的方向,可以找到梯度方向上最接近的相邻像素,如果像素(i, j)大于相邻像素的梯度幅值,则保留该像素的梯度幅值,否则将其设置为0;
29、4)对梯度幅值图像m(i,j)进行阈值处理,选择固定阈值t,将所有梯度幅值大于t的像素视为边缘像素,其他像素视为非边缘像素;
30、5)使用膨胀操作连接断裂的裂缝边缘,形成完整的裂缝轮廓,具体为选择一个矩形结构元素,将该结构元素的原点对准中的每个像素,并判断结构元素覆盖的区域是否与图像中的边缘像素有交集,如果有交集,则将该像素点的像素值设置为所有覆盖边缘像素的平均值;如果没有交集,则保持该像素点的原始值;
31、膨胀后的图像表示为if_gray;
32、6)选取固定阈值tb,将if_gray转换为二值图像,即大于tb的像素点设置为255,反之设置为0;
33、使用骨架提取算法将二值图像的线条减缩至单像素宽,计算裂缝骨架的像素长度,再根据图像的分辨率和拍摄时的比例尺,将像素长度转换为实际物理尺寸,得到裂缝长度;
34、使用正交骨架线法计算图像中裂缝的像素宽度,再根据图像的分辨率和拍摄时的比例尺,将像素距离转换为实际物理尺寸,得到裂缝宽度。
35、进一步的,所述姿态偏差检测具体为,使用cnn模型识别数据预处理后图像,该模型依次由3个卷积层、1个池化层、1个全连接层和1个输出层组成,输出层神经元个数为6,分别代表在围堰在三维空间绕x、y和z轴的旋转角度和在x、y和z方向平移量。
36、进一步的,所述变形检测具体为,使用cnn模型识别数据预处理后图像,所述模型依次由3个卷积层、1个池化层、1个全连接层和1个分类层分类层神经元个数为3,分别代表围堰正常、凸起和凹陷。
37、进一步的, 所述步骤s3的深度学习模型主体为bi-gru结构,bi-gru包括前向gru结构和后向gru结构,前向gru结构可表示为,
38、前向更新门:
39、
40、其中,是sigmoid激活函数,是更新门的权重矩阵,是前一时间步的隐藏状态,是当前时间步的潮汐数据,是偏置项,
41、前向重置门:
42、
43、其中,是重置门的权重矩阵,是偏置项,
44、前向新的候选状态:
45、
46、其中,是新候选状态的权重矩阵,是偏置项,表示元素乘法。
47、前向更新隐藏状态:
48、
49、其中,是当前时间步的隐藏状态,
50、后向gru结构与前向完全一致,最终bi-gru输出为,
51、
52、其中,是正向gru的隐藏状态,是反向gru的隐藏状态,
53、在bi-gru结构后连接有全连接层。
54、进一步的,对所述深度学习模型的输入为固定时间窗口ts的潮汐高度、浪高、海流速度和围堰水压的时间序列,输出为滞后时间的固定时间窗口ts的水压时间序列,
55、为寻找最佳时间窗口,选取不同的时间窗口大小ts 进行验证,为寻找最佳滞后时间,选取不同的滞后时间进行验证,
56、比较不同的时间窗口和不同滞后时间下,所述深度学习模型的均方误差(mse),确定最佳的时间窗口和滞后时间,并将实时潮汐数据和围堰水压数据的时间序列输入该模型,以预测未来时间后的围堰水压数据。
57、与现有技术相比,本发明的优点在于:
58、1. 本发明提高围堰防渗监测的准确性,通过高清图像和水压传感器数据相结合,不仅监测围堰外部结构的变化,还能实时反映水下部分的水压变化,全面覆盖围堰防渗监测的关键区域。本发明采用计算机视觉技术和深度学习技术对图像进行处理和识别,能够高效、精准地检测围堰裂缝、变形及姿态偏差,确保防渗问题早期发现。
59、2. 本发明引入bi-gru结构模型,利用时间序列的前向和后向特征,全面捕捉潮汐和水压的动态变化规律,显著提高水压预测的准确性,并基于最新的数据,定期更新深度学习模型参数,确保预测结果始终保持高效性和准确性。
60、3. 本发明在检测结果超出设定阈值时,能够自动触发预警,并通知相关人员及时采取修补或加固措施,减少人工干预,节约维护成本,本发明构建全面的围堰状态和水压数据库,为后续维护和管理提供数据支撑,便于进行围堰状态的趋势分析和优化维护决策。
本文地址:https://www.jishuxx.com/zhuanli/20250117/355880.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表