-
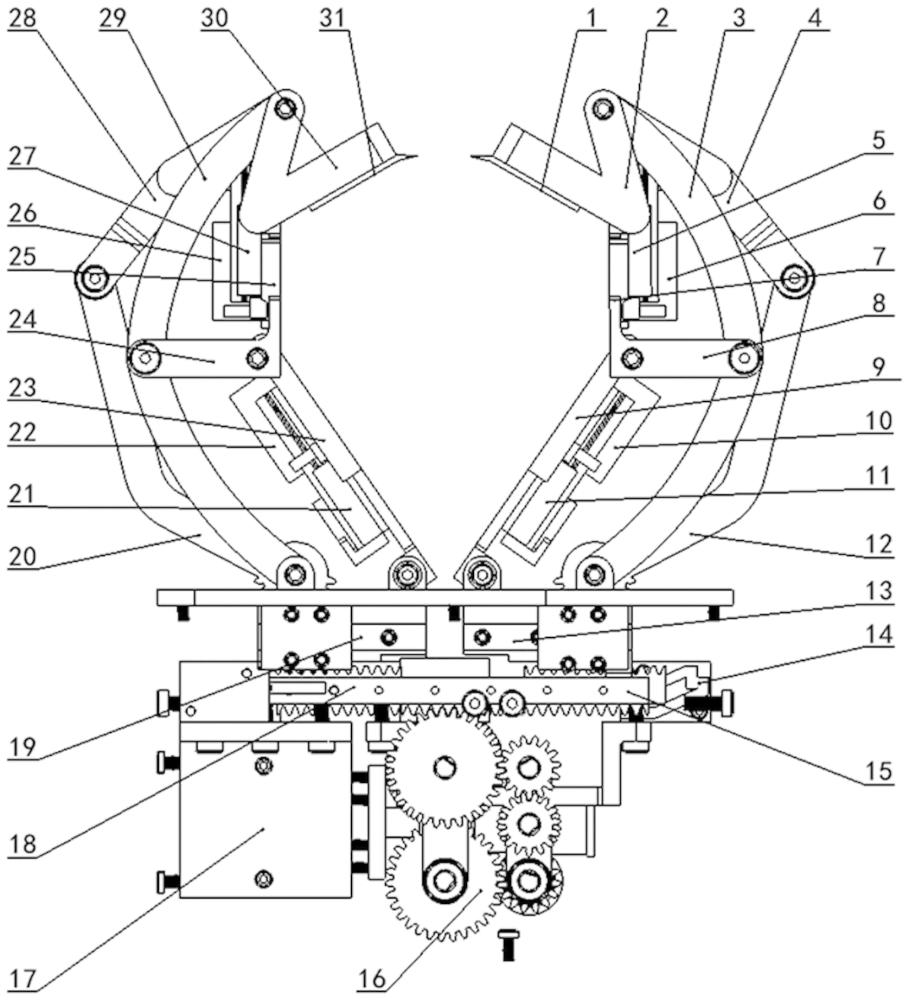
一种可变指长的三指欠驱动抓手的制作方法
本发明涉及机械夹持手,尤其涉及一种可变指长的三指欠驱动抓手。背景技术:1、目前,抓取是大多数机器人在实际应用中的重要能力,欠驱动抓手作为抓取的执行器,在抓取特殊结构物体如柔软、易碎、可变形等物体时具有......
技术新讯 > 三指欠 > 列表
 2024-08-05
2024-08-05精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种基于EPA(EffectiveProjectedArea有效投影面积)的铁塔租赁方案的制作方法
2024-07-31 -

一种低铱含量铱钽钛阳极的制备方法与流程
2024-07-27 -
基于区块链和零知识证明的车载自组织网络匿名认证方法
2024-08-08 -
一种基于VR的互动冥想设备的制作方法
2024-06-21 -
一类用于脂滴免洗成像的荧光染料及其合成和应用
2024-06-20 -
一种发动机分体式整流支撑机匣工艺连接装置和方法与流程
2024-07-27