1.本实用新型涉及运输工具的技术领域,特别涉及一种摇摆环境下的梯道有轨遥控运输装置。
背景技术:
2.一般楼层间的运输采用吊车进行上下楼层的吊运,但在摇摆环境下,比如船舶或者海洋平台上,吊运存在一定的风险和不可控因素。特别是在建设阶段未予考虑的情况中,若在后期进行使用,则容易出现上下两层之间物料搬运困难的问题。
3.具体的,目前市场同类产品(船舶、海工平台等摇摆环境下作业)存在的问题:
4.1、若利用吊车运输,则在摇摆环境下作业存在不可控的安全风险,且在摇摆比较激烈时候基本无法作业;
5.2、若利用卷扬机进行操作,也存在各种问题,譬如卷扬机的体积和质量均较大,而且同时需要为牵引机设置基座和固定,钢丝缆的挂载和牵引对场所要求较高,还可能对附近行人的安全产生问题;
6.3、传统的平板车,一般是橡胶轮、固定运载面等限制,不具备楼层见运输能力。
7.为此急需一种能够解决上述问题的技术方案。
技术实现要素:
8.本实用新型的目的在于提供一种摇摆环境下的梯道有轨遥控运输装置,以解决摇摆环境下梯道运输不便的问题。
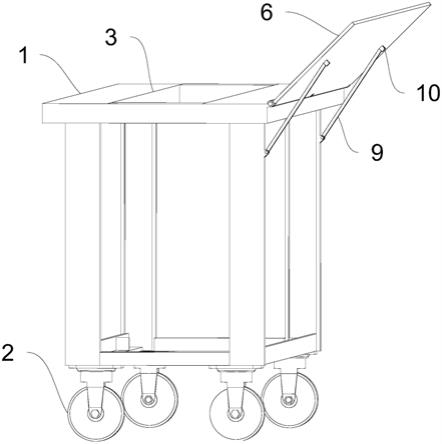
9.为了解决上述技术问题,本实用新型提供了一种摇摆环境下的梯道有轨遥控运输装置,包括齿形轨道和运载车;所述齿形轨道用于铺设在楼梯上;所述运载车包括车架、以及设于所述车架上的驱动机构、带齿车轮、角度调节机构和承托板;所述驱动机构用于驱动所述带齿车轮自转,所述带齿车轮与所述齿形轨道啮合;所述角度调节机构与所述承托板连接,所述角度调节机构用于调节所述承托板摆放角度。
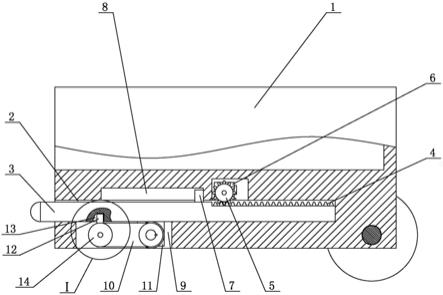
10.在其中一个实施例中,所述驱动机构包括电机、传动齿轮和蜗杆;所述电机用于驱动所述传动齿轮自转,所述传动齿轮与所述蜗杆啮合,所述蜗杆与所述带齿车轮联动连接,所述蜗杆的自转用于带动所述带齿车轮自转。
11.在其中一个实施例中,所述驱动机构还包括棘轮、第一棘爪、第二棘爪和控制器,所述棘轮与所述传动齿轮同轴设置,所述第一棘爪和所述第二棘爪均以可转动的方式分别设于所述棘轮相对的两侧,所述控制器用于控制所述第一棘爪与所述棘轮的弹性啮合和分离,以及控制所述第二棘爪与所述棘轮的弹性啮合和分离。
12.在其中一个实施例中,所述角度调节机构设于所述承托板一侧的下方,所述承托板相对的另一侧与所述车架铰接,所述角度调节机构用于推动所述承托板绕自身的铰接端转动。
13.在其中一个实施例中,所述角度调节机构为折叠升降架或伸缩杆。
14.在其中一个实施例中,所述车架相对的两侧均设有限位杆,所述限位杆上设有滚轮,所述滚轮与所述齿形轨道的下侧面滚动抵接。
15.在其中一个实施例中,所述齿形轨道的两端均设有到位识别装置,所述车架的前后方均设有到位传感器,在所述到位传感器检测发现所述到位识别装置时,所述梯道有轨遥控运输装置控制所述运载车停止运行。
16.在其中一个实施例中,所述梯道有轨遥控运输装置还包括遥控器,所述遥控器用于遥控所述运载车运行。
17.本实用新型的有益效果如下:
18.由于所述角度调节机构与所述承托板连接,所述角度调节机构用于调节所述承托板摆放角度,所以在进行角度调节完毕后,将可确保货物在承托板上的平稳摆放,而所述驱动机构用于驱动所述带齿车轮自转,所述带齿车轮与所述齿形轨道啮合,则实现了运载车在齿形轨道槽上运行,此运行方式稳定可靠,从而使得摇摆环境下的梯道运输得以实现,切实解决了解决摇摆环境下梯道运输不便的问题。
附图说明
19.为了更清楚地说明本实用新型的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1是本实用新型梯道有轨遥控运输装置实施例提供的结构示意图;
21.图2是图1的传动齿轮与蜗杆啮合状态示意图;
22.图3是图1的棘轮棘爪装配示意图;
23.图4是图3的第二棘爪与棘轮分离状态示意图;
24.图5是图3的第一棘爪与棘轮分离状态示意图;
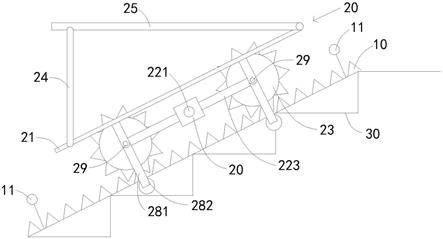
25.图6是图1中角度调节机构为折叠升降架时的结构示意图;
26.图7是图1中角度调节机构为升降杆时的结构示意图。
27.附图标记如下:
28.10、齿形轨道;11、到位识别装置;
29.20、运载车;21、车架;22、驱动机构;221、电机;222、传动齿轮;223、蜗杆;23、带齿车轮;24、角度调节机构;241、折叠升降架;242、伸缩杆;25、承托板;26、棘轮;271、第一棘爪;272、第二棘爪;281、限位杆;282、滚轮;29、到位传感器;
30.30、楼梯。
具体实施方式
31.下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述。
32.本实用新型提供了一种摇摆环境下的梯道有轨遥控运输装置,其实施例如图1所示,包括齿形轨道10和运载车20;齿形轨道10用于铺设在楼梯30上;运载车20包括车架21、以及设于车架21上的驱动机构22、带齿车轮23、角度调节机构24和承托板25;驱动机构22用
于驱动带齿车轮23自转,带齿车轮23与齿形轨道10啮合;角度调节机构24与承托板25连接,角度调节机构24用于调节承托板25摆放角度。
33.在进行应用时,将两条齿形轨道10铺设于楼梯30上,运载车20则通过带齿车轮23与齿形轨道10的啮合完成初步装配,在装配完毕后,通过角度调节机构24调节承托板25的摆放角度,使得承托板25呈水平布置,以便于对货物实现平稳摆放,然后通过驱动机构22驱动带齿车轮23自转,运载车20便可在齿形轨道10上进行升降移动,此运行方式稳定可靠,从而使得摇摆环境下的梯道运输得以实现,切实解决了解决摇摆环境下梯道运输不便的问题。
34.如图1和图2所示,驱动机构22包括电机221、传动齿轮222和蜗杆223;电机221用于驱动传动齿轮222自转,传动齿轮222与蜗杆223啮合,蜗杆223与带齿车轮23联动连接,蜗杆223的自转用于带动带齿车轮23自转。
35.譬如可利用电机221的输出轴与传动齿轮222的几何中心连接,所以当电机221启动后,传动齿轮222将可进行自转,由于传动齿轮222与蜗杆223啮合,所以蜗杆223也将跟随自转,从而带动带齿车轮23进行自转,以此实现了运载车20的移动控制。
36.如图1至图5所示,所述驱动机构22还包括棘轮26、第一棘爪271、第二棘爪272和控制器(未示出),所述棘轮26与所述传动齿轮222同轴设置,所述第一棘爪271和所述第二棘爪272均以可转动的方式分别设于所述棘轮26相对的两侧,所述控制器用于控制所述第一棘爪271与所述棘轮26的弹性啮合和分离,以及控制所述第二棘爪272与所述棘轮26的弹性啮合和分离。
37.假定传动齿轮222进行顺时针转动时,运载车20将进行上移运动,传动齿轮222进行逆时针转动时,运载车20进行下移运动,由于棘轮26与传动齿轮222为同轴设置,所以棘轮26将会跟随传动齿轮222进行同向转动。
38.如在图4所示方向中,第一棘爪271置于棘轮26的左侧,第二棘爪272置于棘轮26的右侧,默认在初始状态中,第一棘爪271和第二棘爪272均与棘轮26弹性抵接,若需要控制运载车20进行上移,控制器则可控制第二棘爪272转离棘轮26,由于第一棘爪271与棘轮26之间为弹性抵接,所以棘轮26在进行顺时针转动的过程中,将可拨动第一棘爪271,不但能够确保棘轮26进行顺时针转动的顺畅,也确保棘轮26在变为逆时针转动时,第一棘爪271能够限制棘轮26的逆时针转动。
39.类似的,如图5所示,若需要控制运载车20进行下移,控制器则可控制第一棘爪271转离棘轮26,由于第二棘爪272与棘轮26之间为弹性抵接,所以棘轮26在进行逆时针转动的过程中,将可拨动第二棘爪272,不但能够确保棘轮26进行逆时针转动的顺畅,也确保棘轮26在变为顺时针转动时,第二棘爪272能够限制棘轮26的顺时针转动。
40.更进一步的,若需要控制运载车20完全停止行驶,如图3所示,控制器只需控制第一棘爪271和第二棘爪272同时与棘轮26啮合便可。
41.其中,为实现第一棘爪271与棘轮26的弹性抵接,可利用弹簧推拉第一棘爪271移向棘轮26便可,同理,为实现第二棘爪272与棘轮26的弹性抵接,同样可以利用弹簧推拉第二棘爪272移向棘轮26实现。
42.如图1、图6和图7所示,角度调节机构24设于承托板25一侧的下方,承托板25相对的另一侧与车架21铰接,角度调节机构24用于推动承托板25绕自身的铰接端转动。
43.譬如在图示的方向中,角度调节机构24与承托板25左侧的下部连接,承托板25的右侧与车架21铰接,具体的,此实施例优选设置角度调节机构24为折叠升降架241或伸缩杆242,所以当角度调节机构24将可以控制承托板25左侧的升降,只要升降高度控制得当,则可确保承托板25始终处于水平状,为货物的平稳放置提供了重要保障。
44.其中,当角度调节机构24为折叠升降架241时,折叠升降架241可通过四条支撑杆相互铰接形成四边形,当要利用折叠升降架241举高承托板25时,控制四条支撑杆往内翻转便可,当要利用折叠升降架241降低承托板25时,控制四条支撑杆往外翻转便可。
45.如图1所示,车架21相对的两侧均设有限位杆281,限位杆281上设有滚轮282,滚轮282与齿形轨道10的下侧面滚动抵接。
46.在增设限位杆281和滚轮282后,则避免了运载车20在齿形轨道10上产生横移,确保了运载车20与齿形轨道10之间装配稳定,以防止出现倾覆现象,而且由于滚轮282与齿形轨道10之间为滚动抵接,也能确保运载车20移动过程中的流畅性。
47.如图1所示,齿形轨道10的两端均设有到位识别装置11,车架21的前后方均设有到位传感器29,在到位传感器29检测发现到位识别装置11时,梯道有轨遥控运输装置控制运载车20停止运行。
48.在进行应用时,若到位识别装置11与到位传感器29的距离足够近,到位传感器29便可产生相应信号至梯道有轨遥控运输装置,以此判断运载车20已经移动到位,从而便于及时控制运载车20停止运行。
49.优选的,梯道有轨遥控运输装置还包括遥控器(未示出),遥控器用于遥控运载车20运行。
50.在增设遥控器后,则便于控制运载车20的移动,而且此时还可优选设置遥控器为两套,从而方便再梯道的上下方向分别进行控制,以此提高了货物运输的效率。
51.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。