1.本发明涉及智能纺纱设备技术领域,尤其涉及一种纺纱自动输送机器人。
背景技术:
2.纺纱生产线一般包括依次布设的用于对棉花进行开松处理的抓棉机、对开清棉进行梳理牵伸制成有规律地圈放在棉条筒内的棉条的梳棉机、对棉条进行牵伸并合的并条机(根据需要可以设置多道并条机)、加捻纺成具有一定特数(支数)均匀的有一定强力的纱线的细纱机。无论是环锭纺流程、涡流纺纱流程还是转杯纺纱流程,在整个纺纱流程中,条筒(或称条桶)作为棉条(或称纤维条)的储存容器,被大量的使用。以转杯纺纱流程为例,其通常由抓包机、梳棉机、第一道并条机、第二道并条机和转杯纺纱机组成,条筒在各个设备之间进行运输,并且由挡车工进行接头和返回空条筒。根据需要,对于质量要求较低的粗特纱及废纺时,可采用一道并条或直接生条喂入,即只需设置第一道并条机或不设置并条机。
3.传统的纺纱生产线中,条筒的搬运、棉条的接头和棉条的喂入往往通过挡车工进行人工转运并实现各道工序的连接。一方面,条筒加上装载的棉条,重量一般超过50kg,甚至可达80kg,增加了工人的劳动强度。另一方面,纺纱车间的噪音大、粉尘重、温度高,不利于工人的身体健康;随着人力成本的提高,提高了纺纱厂的生产成本。因此,自动化的条筒运输和棉条输送成为纺纱厂自动化和智能化的一个方向。
4.目前,现有技术也提供了通过agv(穿梭车)车进行转运以减少工人的工作量的技术方案。以中国专利申请201910520791.3为例,其公开了一种条筒搬运车,条筒搬运车通过在设置有对纤维束进行前工序处理的前工序机和对进行了前工序处理的纤维束进行后工序处理的后工序机的工厂内行驶,而在前工序机与后工序机之间搬运用于收容纤维束的条筒,在上述条筒搬运车中,具备:行驶部,其通过在工厂内行驶而搬运条筒;地图存储部,其存储表示包含前工序机和后工序机的设置位置的工厂内的设备的设置位置的工厂地图;行驶路径决定部,其基于工厂地图,决定用于从前工序机朝向后工序机的行驶路径或者用于从后工序机朝向前工序机的行驶路径;及行驶控制部,其通过基于决定出的行驶路径使行驶部自主行驶而在前工序机与后工序机之间搬运条筒。然而,上述条筒搬运车仅负责条筒的搬运,未涉及自动化的棉条输送(喂入),仍然需要人工处理棉条的接头,比如将条筒上的棉条输送到设备的导条器中以实现棉条喂入。
5.综上所述,如何提供一种具有条筒搬运和条筒棉条自动喂入输送功能的纺纱自动输送装置,是当前亟需解决的技术问题。
技术实现要素:
6.本发明的目的在于:克服现有技术的不足,提供了一种纺纱自动输送机器人。本发明提供的纺纱自动输送机器人,包括条筒放置区和内循环牵引结构,所述内循环牵引结构用于与纺纱机的棉条喂入机构中的外循环牵引结构进行配合,在搬运条筒同时还实现了条筒棉条自动喂入,减少了人工成本,提高了纺纱流程的自动化、连续化及智能化。
7.为实现上述目标,本发明提供了如下技术方案:
8.一种纺纱自动输送机器人,包括机器人主体部,所述机器人主体部上设置有控制器和移位结构,所述移位结构用以实现机器人的位置移动;
9.所述机器人主体部包括底座,底座上设置有条筒放置区和内循环牵引结构,所述条筒放置区用于安装条筒,所述内循环牵引结构上设置有棉条限位结构以固定条筒上的棉条条头,所述棉条限位结构能够解除对棉条条头的固定;
10.所述内循环牵引结构用于与纺纱机的棉条喂入机构中的外循环牵引结构连接,所述外循环牵引结构对应着棉条喂入机构的导条器通道设置;机器人将条筒运输至外循环牵引结构所在位置后,控制器控制接头结构连接外循环牵引结构与内循环牵引结构形成闭环的棉条输送结构,通过所述棉条输送结构将条筒上的棉条输送到导条器的通道中,并在棉条条头进入导条器的前端时解除棉条限位结构对棉条条头的固定,棉条在棉条喂入机构的喂给罗拉的回转下进行输送。
11.进一步,所述控制器中包含有无线通讯结构,无线通讯结构与远程控制终端通信连接,用以与远程控制终端进行无线通信,接收远程控制终端的控制指令。
12.进一步,对应条筒设置有棉条检测结构,棉条检测结构与控制器连接并接收控制器的控制,通过棉条检测结构探测条筒上的预设区域是否存在棉条,并在棉条不存在时发出换筒指令;
13.根据所述换筒指令,控制器控制接头结构解除外循环牵引结构与内循环牵引结构的连接使得所述条筒运输机构能够与棉条自传动机构分离,机器人将空条筒运走。
14.进一步,所述棉条限位结构为夹持结构,所述夹持结构包括夹具和夹持取消结构,夹持取消结构能够驱动夹具松开以取消夹持;对应所述夹具设置有位置探测结构,位置探测结构与控制器连接并接收控制器的控制,通过所述位置探测结构获取夹具的位置信息并判断夹具是否到达导条器的前端,在夹具到达导条器的前端时发出解除取消指令;根据所述解除取消指令,控制器控制夹持取消结构驱动夹具松开以解除对棉条条头的固定。
15.进一步,所述棉条限位结构为夹持结构,所述夹持结构包括活动安装在内循环牵引结构上的夹具,当夹具到达导条器的前端时,在喂给罗拉和/或导条器的作用下所述夹具被顶开以解除对棉条条头的固定。
16.进一步,所述棉条限位结构包括设置在内循环牵引结构上的限位槽,对应所述限位槽设置有伸缩块,伸缩块的驱动结构与控制器连接并接收控制器的控制,通过控制器控制伸缩块的驱动结构启动使伸缩块进入限位槽,从而将棉条条头的固定在限位槽中;
17.在导条器的前端设置有与所述限位槽匹配的凸起,当限位槽进入导条器的前端时,前述凸起进入限位槽并驱动伸缩块向限位槽外运动,限位槽解除对棉条条头的固定。
18.进一步,述内循环牵引结构与外循环牵引结构采用同构的传输链条或传输带制作,所述内循环牵引结构包括首尾连接的多个传输链条单元或传输带单元,对应内循环牵引结构的上部末端和下部末端分别设置有上部接头件和下部接头件;
19.连接外循环牵引结构与内循环牵引结构时,通过上部接头件使内循环牵引结构的上部末端与外循环牵引结构的上部末端连接,通过下部接头件使内循环牵引结构的下部末端与外循环牵引结构的下部末端连接,从而形成闭环的棉条传输链条或传输带。
20.进一步,所述内循环牵引结构的传输链条或传输带通过竖杆安装在底座侧部,传
输链条或传输带的上部末端限位在竖杆上部,传输链条或传输带的下部末端限位在竖杆下部;
21.竖杆上部设置有上部接头件和上部导向轮,竖杆下部设置有下部接头件和下部导向轮,上部接头件连接内循环牵引结构的上部末端与外循环牵引结构的上部末端后解除对上部末端的限位,下部接头件连接内循环牵引结构的下部末端与外循环牵引结构的下部末端后解除对下部末端的限位;通过上部导向轮和下部导向轮引导棉条传输链条或传输带的传输方向。
22.进一步,所述接头结构采用卡接连接件、吸附连接件和/或夹扣连接件。
23.进一步,所述移位结构为固定脚轮、活动脚轮或履带。
24.本发明由于采用以上技术方案,与现有技术相比,作为举例,具有以下的优点和积极效果:所述纺纱自动输送机器人,包括条筒放置区和内循环牵引结构,所述内循环牵引结构用于与纺纱机的棉条喂入机构中的外循环牵引结构进行配合,在搬运条筒同时还实现了条筒棉条自动喂入,减少了人工成本,提高了纺纱流程的自动化、连续化及智能化。
附图说明
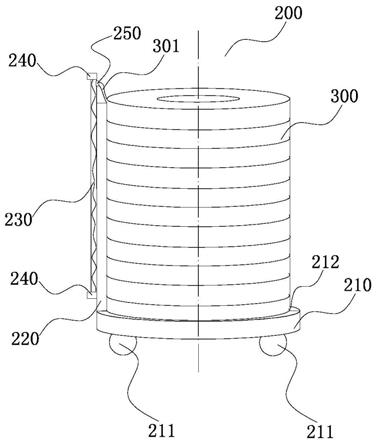
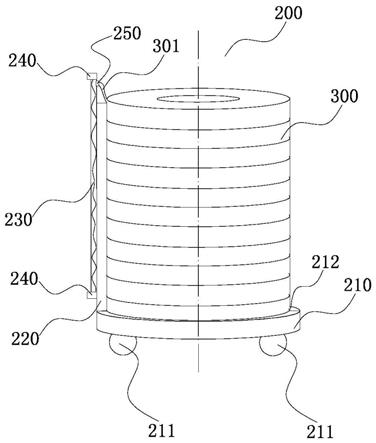
25.图1为本发明实施例提供的搬运有条筒的自动输送机器人的结构示意图。
26.图2为本发明实施例提供的自动输送机器人的工作示意图。
27.图3为本发明实施例提供的具有棉条检测结构的自动输送机器人的结构示意图。
28.图4为本发明实施例提供的具有条筒抱箍的自动输送机器人的结构示意图。
29.图5为本发明实施例提供的自动输送机器人的控制器的模块结构示意图。
30.纺纱器100;壳体110;分梳辊120,纤维转移区121;棉条喂入机构130;输纤通道140;补气通道150;分梳腔排杂区160,杂质剥离通道161;杂质剥离面170;外循环牵引结构180;
31.机器人200;底座210,移位结构211,条筒放置区212;主体支撑220,机械臂221;内循环牵引结构230;接头结构240;棉条限位结构250;棉条检测结构260;
32.条筒300,棉条条头301。
具体实施方式
33.以下结合附图和具体实施例对本发明公开的纺纱自动输送机器人作进一步详细说明。应当注意的是,下述实施例中描述的技术特征或者技术特征的组合不应当被认为是孤立的,它们可以被相互组合从而达到更好的技术效果。在下述实施例的附图中,各附图所出现的相同标号代表相同的特征或者部件,可应用于不同实施例中。因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
34.需说明的是,本说明书所附图中所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定发明可实施的限定条件,任何结构的修饰、比例关系的改变或大小的调整,在不影响发明所能产生的功效及所能达成的目的下,均应落在发明所揭示的技术内容所能涵盖的范围内。本发明的优选实施方式的范围包括另外的实现,其中可以不按所述的或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技
术人员所理解。
35.实施例
36.本发明提供了一种纺纱自动输送机器人。
37.所述自动输送机器人,包括机器人主体部,所述机器人主体部上设置有控制器和移位结构。所述控制器用于进行信息收发和处理、以及机器人的动作控制。所述移位结构用以实现机器人的位置移动。
38.所述机器人主体部包括底座,底座上设置有条筒放置区和内循环牵引结构,所述条筒放置区用于安装条筒,所述内循环牵引结构上设置有棉条限位结构以固定条筒上的棉条条头,所述棉条限位结构能够解除对棉条条头的固定。
39.参见图1所示,具体设置时,所述机器人200的机器人主体部可以包括底座210。所述底座210下设置有移位结构211。所述移位结构211,优选的采用固定脚轮、活动脚轮或履带,通过移位驱动结构驱动固定脚轮、活动脚轮或履带转动。所述移位结构移动的方式可以是有轨道运动,也可以是无轨道运动。采用有轨道运动方式时,对应设置有轨道。
40.优选的,所述移位结构211在本实施例中采用活动脚轮,所述活动脚轮由电机驱动——比如步进电机。此时,可以在控制器的存储器或关联服务器中存储相关地图——比如纺纱设备所在工厂的厂房地图;移位机器人接收到搬运指令后,控制器基于工厂地图确定行驶路径,并控制移位结构启动,搬运条筒。
41.所述底座210上设置有条筒放置区212,所述条筒放置区212用于安装条筒300,参见图1,示例了在条筒放置区装载条筒300。
42.在底座210上通过主体支撑220安装内循环牵引结构230内循环牵引结构。所述内循环牵引结构230用于与纺纱机的棉条喂入机构中的外循环牵引结构连接,所述外循环牵引结构对应着棉条喂入机构的导条器通道设置。
43.机器人的控制器可以安装在底座210或主体支撑220上。本实施例中,所述控制器中包含有无线通讯结构,无线通讯结构与远程控制终端通信连接,用以与远程控制终端进行无线通信,接收远程控制终端的控制指令。
44.对应外循环牵引结构和/或内循环牵引结构还设置有接头结构,通过所述接头结构能够实现外循环牵引结构与内循环牵引结构的连接和分离。具体的,可以在内循环牵引结构230的两个末端分别设置接头结构240。
45.在内循环牵引结构230的上部还安装有棉条限位结构250,所述棉条限位结构用于固定条筒300上的棉条条头301,以及解除对棉条条头301的上述固定。优选的,棉条限位结构250可以将棉条条头301固定在内循环牵引结构的上部,在内循环牵引结构向喂给罗拉方向运动时,带动棉条限位结构和棉条条头一起向喂给罗拉方向运动。
46.需要运输条筒时,机器人200将条筒300运输至纺纱机的外循环牵引结构所在位置后,控制器控制接头结构240连接外循环牵引结构与内循环牵引结构形成闭环的棉条输送结构,通过所述棉条输送结构将条筒300上的棉条输送到导条器的通道中,并在棉条条头301进入导条器的前端时解除棉条限位结构250对棉条条头的固定,棉条在棉条喂入机构的喂给罗拉的回转下进行输送,即喂入喂给罗拉。
47.本实施例中,纺纱机可以为任意类型的纺纱机。下面以转杯纺纱机为例详细描述本发明提供的自动输送机器人。
48.转杯纺纱机的一个生产单元(称为纺纱器)主要包括棉条(或称纤维条)喂入机构、分梳机构、排杂机构、转杯、引纱管、阻捻头等部件组成。其利用转杯高速旋转时的离心力,使得分梳腔处转移到转杯内的纤维产生凝聚,形成须条(纤维环),须条再被加捻形成纱条。排杂装置用于除去棉条中杂质。
49.参见图2所示,对应转杯纺纱机的纺纱器的棉条喂入机构设置有外循环牵引结构连接,所述外循环牵引结构对应着棉条喂入机构的导条器通道设置。
50.所述纺纱器100包括设置有分梳腔的壳体110,分梳机构包括安装在所述分梳腔内的分梳辊120。壳体110上设置有与分梳腔分别连通的棉条喂入机构130和输纤通道140。所述分梳辊120的左侧设置有纤维转移区121用于转移分梳后的棉条。所述纤维转移区121设置于输纤通道140的下方,棉条在分梳之后先经过纤维转移区121,再通过输纤通道140输送至转杯。纺纱时,棉条经棉条喂入机构130送入分梳腔中进行梳理,梳理后的纤维经输纤通道140进入到转杯的内部,再从凝聚槽出来,被牵引进入假捻盘后被制成纱线。
51.本实施例中,对应着分梳腔下方设置有补气通道150和分梳腔排杂区160。通过补气通道150进行分梳腔补气,补气方向对应着分梳辊120下方。分梳腔的下方为分梳腔排杂区160。具体的,在壳体110上对应分梳腔排杂区160设置有向下倾斜布置的杂质剥离面170,通过杂质剥离面170可以在分梳辊120的下部形成向下倾斜的杂质剥离通道。喂入分梳腔的棉条经分梳辊进行梳理时,通过补气通道150对分梳腔补气,杂质或部分杂质在自身重力作用下,通过分梳腔排杂区160落入排杂带排出。
52.所述棉条喂入机构130包括导条器和喂给罗拉,导条器通道的出口连接喂给罗拉,在喂给罗拉的回转下将棉条输送给分梳机构中进行分梳。
53.本实施例中,所述导条器具体可以包括喂给喇叭和喂给板。所述喂给喇叭可以由塑料或胶木压制而成,其通道截面自入口至出口逐渐收缩成扁平状,棉条通过喂给喇叭,其截面随之相应变化。所述喂给板位于喂给罗拉下方,喂给罗拉与喂给板共同握持形成对棉条的握持力。喂给板前端形成喂给钳口,喂给板下设置有弹簧,喂给钳口压力来自所述弹簧,通过调节所述弹簧的压缩量来调整喂给钳口的压力。所述喂给罗拉优选为一沟槽罗拉,与喂给板共同握持,并借喂给罗拉的积极回转,将棉条输送给分梳辊进行分梳。
54.外循环牵引结构180对应着导条器的通道设置,在与内循环牵引结构230与外循环牵引结构180连接后,能够牵引棉条向喂给罗拉方向运动,从而实现棉条的自动喂入。
55.具体的,所述外循环牵引结构180、内循环牵引结构230可以采用传输链条或传输带。
56.优选的,所述外循环牵引结构与内循环牵引结构采用同构的传输链条或传输带制作。所述外循环牵引结构可以包括首尾连接的多个传输链条单元或传输带单元,所述内循环牵引结构也包括首尾连接的多个传输链条单元或传输带单元,所述接头结构包括上部接头件和下部接头件。连接外循环牵引结构与内循环牵引结构时,通过上部接头件使内循环牵引结构的上部末端与外循环牵引结构的上部末端连接,通过下部接头件使内循环牵引结构的下部末端与外循环牵引结构的下部末端连接,从而形成闭环的棉条传输链条或传输带。
57.所述棉条传输链条或传输带优选的通过多个导向轮对应着导条器通道布置。多个导向轮中,至少有一个导向轮为主动轮,剩下导向轮为从动轮,主动轮在旋转驱动结构的驱
动下旋转,从而带动从动轮旋转形成闭环的棉条传输链条或传输带。
58.本实施例中,优选的,采用3个导向轮对应着导条器通道布置,形成三角形或近似三角形的棉条传输链条或传输带。继续参见图2所示,对应导条器通道下方设置有棉条输送导向轮,对应内循环牵引结构与外循环牵引结构的上部接头位置设置有上部导向轮,对应内循环牵引结构与外循环牵引结构的下部接头位置设置有下部导向轮。前述导向轮,棉条输送导向轮可以设置为主动轮,对应主动轮设置选择驱动结构;剩下导向轮为从动轮,可以在链条或传输带的传动作用下进行旋转。棉条喂入输送时,主动轮在旋转驱动结构的驱动下旋转,从而带动从动轮旋转形成闭环的棉条传输链条或传输带。
59.优选的,所述内循环牵引结构的传输链条或传输带通过竖杆安装在机器人的底座的侧部,在未工作状态下,传输链条或传输带的上部末端限位在竖杆上部,传输链条或传输带的下部末端限位在竖杆下部。
60.竖杆上部设置前述上部接头件和上部导向轮,竖杆下部设置前述下部接头件和下部导向轮。工作状态下,在上部接头件连接内循环牵引结构的上部末端与外循环牵引结构的上部末端后,控制器解除对上部末端的限位;同时,在下部接头件连接内循环牵引结构的下部末端与外循环牵引结构的下部末端后,控制器解除对下部末端的限位。然后控制器控制主动轮转动,通过上部导向轮和下部导向轮引导棉条传输链条或传输带的传输方向。
61.本实施例中,接头结构240用于进行内循环牵引结构230与外循环牵引结构180的可拆卸连接,使得内循环牵引结构230与外循环牵引结构180能够在需要时连接成一个闭环的传输结构进行棉条喂入输送,也能够在需要时分离以便更换空条筒。
62.所述接头结构240优选的采用卡接连接件、吸附连接件和/或夹扣连接件。
63.所述卡接连接件优选采用圆形凹槽的子母扣。
64.所述吸附连接件优选的采用磁吸附连接件,通过异性磁极相吸的原理实现内循环牵引结构与外循环牵引结构的可拆卸连接,优选的,采用电磁铁结构。
65.所述夹扣连接件优选的采用]型夹扣。]型夹扣包括两个横臂和连接两个横臂的竖臂,两个横臂分别用于插入内循环牵引结构末端、外循环牵引结构末端的开孔中并被开孔中的限位结构限位,从而实现内循环牵引结构末端与外循环牵引结构末端的连接。
66.所述的限位结构,作为举例而非限制,可以采用限位槽,对应的横臂表面设置有与限位槽匹配的环形凸起,凸起进行限位槽后可以限制横臂的水平运动,防止横臂从开孔中脱离。
67.作为典型方式的举例而非限制,下面以接头结构采用子母扣的卡接连接件为例,详细描述通过接头结构连接外循环牵引结构与内循环牵引结构形成闭环的棉条输送结构的步骤。
68.具体的,所述卡接结构包括可以配合的母扣和子扣,母扣可以采用凹槽,凹槽内壁为弧形,对应的子扣采用圆形凸起;在外力作用下所述子扣可以插入母扣中形成卡接,以及在外力作用下所述子扣可以从母扣中拔出以解除连接。当子扣插入母扣进行卡接时,子扣还可以围绕母扣进行角度旋转。
69.所述接头结构包括上部接头件和下部接头件,连接外循环牵引结构与内循环牵引结构时,通过上部接头件使内循环牵引结构的上部末端与外循环牵引结构的上部末端连接,通过下部接头件使内循环牵引结构的下部末端与外循环牵引结构的下部末端连接,从
而形成闭环的棉条传输链条或传输带。
70.具体的,所述外循环牵引结构可以包括首尾连接的多个传输链条单元,多个传输链条单元也采用上述子母扣方式连接;其中,上部末尾的传输链条单元的末端设置为母扣(对应图2中的外循环牵引结构的上部末端),下部末尾的传输链条单元的末端设置为子扣(对应图2中的外循环牵引结构的下部末端)。对应的,所述内循环牵引结构也包括首尾连接的多个传输链条单元,多个传输链条单元也采用子母扣连接;其中,下部末尾的传输链条单元的末端设置为母扣(对应图3中的内循环牵引结构的下部末端的接头结构),上部末尾的传输链条单元的末端设置为子扣(对应图3中的内循环牵引结构的上部末端的接头结构)。即,外循环牵引结构的上部母扣与内循环牵引结构的上部子扣形成了上部接头件,外循环牵引结构的下部子扣与内循环牵引结构的下部母扣形成了下部接头件。
71.需要连接外循环牵引结构与内循环牵引结构时,控制器控制所述移位机器人整体向外循环牵引结构所在位置运动,使内循环牵引结构进入到外循环牵引结构的两个末端之间,此时,内循环牵引结构的两个末端与外循环牵引结构的两个末端位于同一条直线上。然后,控制器控制子扣向母扣方向运动(此时,对应子扣设置有驱动电机或驱动气缸,驱动电机或驱动气缸与控制器连接并接收控制器的控制)或者控制母扣向子扣方向运动(此时,对应母扣设置有驱动电机或驱动气缸,驱动电机或驱动气缸与控制器连接并接收控制器的控制),在驱动电机或驱动气缸的驱动下,子扣插入母扣完成卡接。
72.当需要外循环牵引结构与内循环牵引结构脱离时,对应的,控制器控制子扣向远离母扣的方向运动,或者控制器控制母扣扣向远离子扣的方向运动(此时,驱动电机或驱动气缸的运动方向,与连接外循环牵引结构与内循环牵引结构时驱动电机或驱动气缸的运动方向相反)。
73.接头结构连接外循环牵引结构与内循环牵引结构后,外循环牵引结构与内循环牵引结构形成了闭环的棉条传输链条或传输带。通过控制导向轮中的主动轮旋转,带动从动轮旋转,棉条在棉条传输链条或传输带的作用向喂给罗拉方向运动。
74.本实施例中,棉条限位结构250用于将棉条条头301固定在内循环牵引结构230上,在内循环牵引结构230向喂给罗拉方向运动时,带动棉条限位结构和棉条条头一起向喂给罗拉方向运动。在棉条条头301进入导条器的前端时,解除棉条限位结构对棉条条头301的固定,棉条在喂给罗拉的回转下输送至分梳机构中。
75.本实施例中的一个实施方式中,所述棉条限位结构优选为夹持结构。具体的,可以采用电控的夹持结构,即通过电动驱动方式控制夹具的夹持与松开,此时,夹具的电动驱动结构与控制器连接并接收控制器的控制;也可以采用非电控的夹持结构,即通过非电动方式控制夹具的夹持与松开。
76.采用电控的夹持结构时,优选的,所述夹持结构包括夹具和夹持取消结构,所述夹持取消结构能够驱动夹具松开以取消夹持。对应所述夹具还设置有位置探测结构,通过所述位置探测结构获取夹具的位置信息并判断夹具是否到达导条器的前端,在夹具到达导条器的前端时发出解除夹持指令。
77.根据所述解除夹持指令,控制器控制夹持取消结构驱动夹具松开以解除对棉条条头的固定,棉条在喂给罗拉的回转下输送至分梳机构中。
78.优选的,所述位置探测结构可以包括摄像头和图像识别装置,所述导条器的前端
设置可探测标记——比如特殊的表面颜色或特殊的表面纹理或设置可探测光电元件等。通过摄像头采集导条器通道的图像数据并发送给图像识别装置,当棉条到达导条器的前端时所述可探测标记被遮盖,此时采集的图像数据中没有可探测标记,即可以判定夹具到达导条器的前端,发出解除夹持指令。根据所述解除夹持指令,夹持取消结构驱动夹具松开,解除夹具对棉条条头的限位(固定)。
79.采用非电控的夹持结构时,优选的,所述夹持结构包括活动安装在内循环牵引结构上的夹具,当夹具到达导条器的前端时,在喂给罗拉和/或导条器的作用下所述夹具被顶开以解除对棉条条头的固定,棉条在喂给罗拉的回转下输送至分梳机构中。
80.优选的,被顶开的夹具从内循环牵引结构下脱离后,在重力作用下,掉入设置在导条器通道的前端的回收槽中进行回收。
81.本实施例中的另一个实施方式中,所述棉条限位结构还可以采用活动限位块进行限位和解除限位。
82.具体的,棉条限位结构可以包括设置在内循环牵引结构上的限位槽,对应所述限位槽设置有伸缩块,伸缩块的驱动结构与控制器连接并接收控制器的控制,通过控制器控制伸缩块的驱动结构启动使伸缩块进入限位槽,从而将棉条条头的固定在限位槽中。
83.在导条器的前端设置有与所述限位槽匹配的凸起,当限位槽进入导条器的前端时,前述凸起进入限位槽并驱动伸缩块向限位槽外运动,限位槽解除对棉条条头的固定,棉条在喂给罗拉的回转下输送至分梳机构中。
84.本实施例中,参见图3所示,机器人还包括对应条筒300设置的棉条检测结构260,棉条检测结构260与控制器连接并接收控制器的控制。在棉条输送时,通过棉条检测结构260探测条筒300上的预设区域是否存在棉条,并在棉条不存在时发出换筒指令。
85.根据所述换筒指令,控制器控制接头结构250解除外循环牵引结构与内循环牵引结构的连接,使得所述条筒运输机构能够与棉条自传动机构分离,然后机器人将空条筒运走,以便装载有满条筒的其它机器人将内循环牵引结构连接到外循环牵引结构上。
86.本实施例中,所述主体支撑220上可以设置有拿取条筒的结构以实现条筒的自动拿取和移除。优选的,采用图4中的机械臂221结构,通过机械臂221将条筒放置在条筒放置区212或者将条筒从条筒放置区212移除后放置在指定位置。所述机械臂221通过升降机构安装在主体支撑220上,可以主体支撑上下移动以条筒机械臂221的高度,从而适应不同高度尺寸的条筒。
87.优选的,所述机械臂优选的安装在主体支撑220的左右两侧,包括左侧支臂和右侧支臂,通过左侧支臂和右侧支臂可以形成类似于抱箍的结构对条筒进行抱取操作,从而拿取条筒。对用所述左侧支臂和右侧支臂分别设置有控制电路,两个控制电路均与控制器连接,通过控制器控制机械臂拿取、放置条筒。
88.进一步,所述机械臂采用六自由度机械臂,包括依次活动连接的臂部、肘部和手部,可以根据需要灵活调整机械臂以拿取条筒、放置条筒。
89.本实施例中,所述机器人主体部上还可以设置摄像结构。所述摄像结构包括至少一个摄像头,能够采集机器人前方、左侧、右侧和/或后方等各方方位上的环境图像信息。
90.进一步,所述机器人主体部上还可以设置有避障装置。所述避障装置在监测到障碍物时向控制器发出信号,控制器控制移位结构调整机器人的移动方位。具体设置时,所述
避障装置可以是超声波雷达装置、超声波红外避障仪等,属于现有技术,在此不再赘述。
91.根据需要,所述机器人上还可以设置有人机交互模块。作为举例而非限制,所述人机交互模块可以包括设置在机器人躯干部上的操作面板、扬声器和拾音器,所述操作面板、扬声器和拾音器均与控制器电连接。
92.参见图5所示,为本实施例中机器人的控制器的模块结构图。所述控制器201可以包括芯片11,电池12,以及存储模块11
‑
1、wifi模块11
‑
2、图像处理模块11
‑
3、无线通讯结构11
‑
4,充电模块11
‑
5等。所述芯片11可以选择pcba式印刷电路板结构,在芯片上电连接集成设置前述存储模块11
‑
1,wifi模块11
‑
2,图像处理模块11
‑
3,无线通讯结构11
‑
4和充电模块11
‑
5。所述电池12分别与各模块电连接。
93.所述存储模块11
‑
1可以用于存储机器人录制、存储、上传和下载的信息;所述wifi模块11
‑
2能够建立机器人与关联终端、服务器的无线网络连接;所述图像处理模块11
‑
3用于处理机器人录制、存储、上传和下载的图像信息,其可以与摄像结构电连接;无线通讯结构11
‑
4用以与关联的终端(比如用户终端、服务器等)进行通讯;所述充电模块11
‑
5用以控制电池12的电量盈亏和充电管理。
94.在上面的描述中,在本公开内容的目标保护范围内,各组件可以以任意数目选择性地且操作性地进行合并。另外,像“包括”、“囊括”以及“具有”的术语应当默认被解释为包括性的或开放性的,而不是排他性的或封闭性,除非其被明确限定为相反的含义。所有技术、科技或其他方面的术语都符合本领域技术人员所理解的含义,除非其被限定为相反的含义。在词典里找到的公共术语应当在相关技术文档的背景下不被太理想化或太不实际地解释,除非本公开内容明确将其限定成那样。
95.虽然已出于说明的目的描述了本公开内容的示例方面,但是本领域技术人员应当意识到,上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明的优选实施方式的范围包括另外的实现,其中可以不按所述出现或讨论的顺序来执行功能。本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。