技术特征:
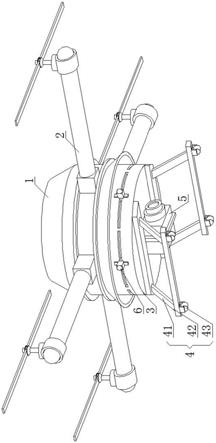
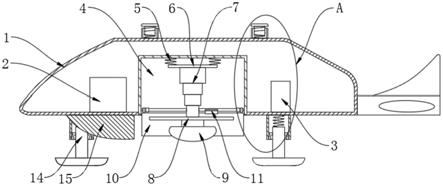
1.一种带三维感知系统的无人机,包括本体(1)和安装在本体(1)外表面的旋翼(2),其特征在于:所述本体(1)的下端安装有安装机构(3),安装机构(3)的下端设置有支撑机构(4)和摄像机构(5),安装机构(3)的外表面活动安装有三维感知机构(6),安装机构(3)的内部设置有与三维感知机构(6)连接的驱动机构(7);所述安装机构(3)包括外壳(31)和加工在外壳(31)外表面的滑槽(32),外壳(31)上端的外表面安装有防护罩(33),外壳(31)的外表面设置有与滑槽(32)相接的阻挡块(34)。2.根据权利要求1所述的一种带三维感知系统的无人机,其特征在于:所述阻挡块(34)设置有四组,且利用阻挡块(34)将滑槽(32)划分为四个部分。3.根据权利要求1所述的一种带三维感知系统的无人机,其特征在于:所述支撑机构(4)包括弹性片(41)和安装在弹性片(41)下端的立杆(42),立杆(42)的下端设置有滑动轮(43)。4.根据权利要求1所述的一种带三维感知系统的无人机,其特征在于:所述摄像机构(5)包括摄像头(51)和安装在摄像头(51)上端的安装座(52),以及安装在外壳(31)下端的电动伸缩杆(53),电动伸缩杆(53)的输出端与安装座(52)连接。5.根据权利要求1所述的一种带三维感知系统的无人机,其特征在于:所述三维感知机构(6)包括设置在外壳(31)外表面的安装件(61)和安装在安装件(61)外端的三维感知传感器(62),三维感知传感器(62)与摄像头(51)无线连接,三维感知传感器(62)的型号为gy
‑
521mpu6050。6.根据权利要求1所述的一种带三维感知系统的无人机,其特征在于:所述驱动机构(7)包括安装在外壳(31)内部的电机(71)和安装在电机(71)输出端的转轴(72),转轴(72)的下端贯穿外壳(31)与电动伸缩杆(53)连接,且外表面安装有连杆(73)。7.根据权利要求6所述的一种带三维感知系统的无人机,其特征在于:所述连杆(73)远离转轴(72)的一端与安装件(61)固定连接,且连杆(73)、转轴(72)和三维感知传感器(62)均设置有四组,且四组与滑槽(32)贯穿连接。
技术总结
本实用新型公开了一种带三维感知系统的无人机,包括本体和安装在本体外表面的旋翼,转轴外表面安装有连杆,连杆远离转轴的一端与安装件固定连接,安装件的外端安装有三维感知传感器,且连杆、转轴和三维感知传感器均设置有四组,且四组与滑槽贯穿连接,当电机工作过程中,三维感知传感器的位置改变,便于大范围的感知事物的三维形态,三维感知传感器与摄像头无线连接,三维感知传感器可对周围事物进行全方位的自动化扫描测量,满足事物的逆向三维建模、识别和测量要求,可对远程控制终端展现出三维的效果,工作完成后,无人机降落时,由立杆接触地面,立杆的下端设置有滑动轮可对无人机起到平滑的降落,使用效果好。使用效果好。使用效果好。
技术研发人员:谢甫彪
受保护的技术使用者:深圳市科创航空技术有限公司
技术研发日:2021.06.15
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。