技术特征:
1.用于在能转向的车桥(6a)上以不同侧不同作用的制动力(far、fal)进行不期望的制动时控制车辆(1)的方法,所述方法至少具有如下的步骤:-确定在能转向的车桥(6a)上是否存在以不同侧不同作用的制动力(far、fal)进行的意外制动(st1),其中,由于在能转向的车桥(6a)上不同侧不同作用的制动力(far、fal)使所述车辆(1)以制动横摆率(gb)朝横摆方向(rg)横摆;-获知由于不同侧不同作用的制动力(far、fal)使所述车辆(1)横摆的横摆方向(rg)(st2);-一旦确定了在能转向的车桥(6a、6b)上的以不同侧不同作用的制动力(far、fal)进行的意外制动,就给定并调整出转向角请求(lsoll),其中,依赖于获知的横摆方向(rg)来给定所述转向角请求(lsoll),使得在调整出所述转向角请求(lsoll)之后在能转向的车桥(6a)上抵偿所述制动横摆率(gb)(st3、st4)。2.根据权利要求1所述的方法,其特征在于,确定在能转向的前桥(6a)上的以不同侧不同作用的制动力(far、fal)进行的意外制动。3.根据权利要求1或2所述的方法,其特征在于,仅在存在制动规则(bv)的情况下,才确定在能转向的车桥(6a)上的以不同侧不同作用的制动力(far、fal)进行的意外制动。4.根据前述权利要求中任一项所述的方法,其特征在于,在转向调节(lg)的范围中在能转向的车桥(6a)上给定并调整出所述转向角请求(lsoll),使得当前存在的实际横摆率(gist)逼近给定的目标横摆率(gsoll),尤其是直至所述实际横摆率(gist)相当于所述给定的目标横摆率(gsoll)。5.根据权利要求4所述的方法,其特征在于,在确定在能转向的车桥(6a)上的以不同侧不同作用的制动力(far、fal)进行的不期望的制动之前,从车辆(1)中存在的实际横摆率(gist)推导出所述目标横摆率(gsoll)。6.根据前述权利要求中任一项所述的方法,其特征在于,-依赖于在能转向的车桥(6a)的不同侧不同地受制动的车轮(5ar、5al)上的制动压力(par、pal)之间的制动压力差(dp)和/或-依赖于在能转向的车桥(6a)的不同侧不同地受制动的车轮(5ar、5al)上的车轮转速(nar、nal)之间的车轮转速差(dn)和/或-依赖于在能转向的车桥(6a)的不同侧不同地受制动的车轮(5ar、5al)上的车轮速度(var、val)之间的车轮速度差(dv)来确定在能转向的车桥(6a)上是否存在以不同侧不同作用的制动力(far、fal)进行的不期望的制动。7.根据权利要求6所述的方法,其特征在于,当所述制动压力差(dp)超过最大的制动压力差(dpmax)和/或所述车轮转速差(dn)超过最大的车轮转速差(dnmax)和/或所述车轮速度差(dv)超过最大的车轮速度差(dvmax)时,推断出在能转向的车桥(6a)上的以不同侧不同作用的制动力(far、fal)进行的不期望的制动。8.根据权利要求6或7所述的方法,其特征在于,依赖于所述制动压力差(dp)和/或所述车轮转速差(dn)和/或所述车轮速度差(dv)来获知所述横摆方向(rg)。9.根据权利要求6至8中任一项所述的方法,其特征在于,从abs控制信号(sar、sal、
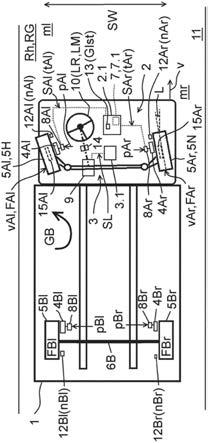
sbr、sbl)估计出所述制动压力差(dp),其中,依赖于所述abs控制信号(sar、sal、sbr、sbl)通过abs控制阀(8ar、8al、8br、8bl)以因侧而异的方式调适被调控到车轮制动器(4ar、4al、4br、4bl)上的制动压力(par、pal、pbr、pbl),以形成所述制动压力差(dp),并且/或者从通过在各个车轮(5ar、5al、5br、5bl)上的车轮转速传感器(12ar、12al、12br、12bl)获知和输出的车轮转速(nar、nal、nbr、nbl)来获知所述车轮转速差(dn)和/或所述车轮速度差(dv)。10.根据前述权利要求中任一项所述的方法,其特征在于,通过能电控制的转向系统(3)在能转向的车桥(6a)上自动化地实施所述转向角请求(lsoll)。11.根据前述权利要求中任一项所述的方法,其特征在于,依赖于所述车辆(1)的轮胎(kb)和/或车道特性(kf)和/或车桥负载(kl)和/或能转向的车桥(6a)的轮距(sw)和/或车辆速度(v)来给定所述转向角请求(lsoll)。12.根据前述权利要求中任一项所述的方法,其特征在于,能够依赖于经由方向盘(10)操控的转向力矩(lm)来调整出能转向的车桥(6a)的转向角(l),其中,由于被操控的转向力矩(lm)使驾驶员横摆率(gf)作用到所述车辆(1)上,其中,当起作用的驾驶员横摆率(gf)与所述制动横摆率(gb)相反指向时,允许被操控的转向力矩(lm),否则就抑制。13.根据前述权利要求中任一项所述的方法,其特征在于,-由于对开路面制动(bmu)和/或-由于配属给能转向的车桥(6a)的受制动的车轮(5ar、5al)的abs控制阀(8ar、8al)或车轮制动器(4ar、4al)中的至少一个abs控制阀或车轮制动器的故障或失效和/或-由于能转向的车桥(6a)的受制动的车轮(5ar、5al)的至少一个车轮轴承(15ar、15al)的故障或失效和/或-由于所述车辆1的以因车轮而异的方式影响能转向的车桥(6a)上的制动力(far、fal)的部件的故障或失效,在能转向的车桥(6a)上存在以不同侧不同作用的制动力(far、fal)进行的不期望的制动。14.用于在能转向的车桥(6a)上以不同侧不同作用的制动力(far、fal)进行不期望的制动时控制、尤其是根据前述权利要求中任一项所述的方法来控制车辆(1)的控制系统(100),所述控制系统具有能电子控制的制动系统(2)和用于在能转向的车桥(6a)上调整出转向角请求(lsoll)的能电子控制的转向系统(3),其特征在于,所述控制系统(100)被构造成-确定在能转向的车桥(6a)上是否存在以不同侧不同作用的制动力(far、fal)进行的意外制动,并且获知由于不同侧不同作用的制动力(far、fal)使所述车辆(1)横摆的横摆方向(rg);并且-一旦确定了在能转向的车桥(6a、6b)上的以不同侧不同作用的制动力(far、fal)进行的意外制动,就给定并通过所述能电子控制的转向系统(3)调整出转向角请求(lsoll),其中,依赖于获知的横摆方向(rg)来给定所述转向角请求(lsoll),使得在调整出所述转向角请求(lsoll)之后能够在能转向的车桥(6a)上抵偿制动横摆率(gb)。15.具有根据权利要求14所述的控制系统(100)的车辆(1)。
技术总结
本发明涉及用于在能转向的车桥(6A)上以不同侧不同作用的制动力(FAr、FAl)进行不期望的制动时控制车辆(1)的方法,所述方法至少具有如下的步骤:-确定在能转向的车桥(6A)上是否存在以不同侧不同作用的制动力(FAr、FAl)进行的意外制动,其中,由于在能转向的车桥(6A)上不同侧不同作用的制动力(FAr、FAl)使车辆(1)以制动横摆率(GB)朝横摆方向(RG)横摆;-获知由于不同侧不同作用的制动力(FAr、FAl)使所述车辆(1)横摆的横摆方向(RG);-一旦确定了在能转向的车桥(6A、6B)上的以不同侧不同作用的制动力(FAr、FAl)进行的意外制动,就给定并调整出转向角请求,其中,依赖于获知的横摆方向(RG)来给定转向角请求,使得在调整出转向角请求(LSoll)之后在能转向的车桥(6A)上抵偿制动横摆率(GB)。横摆率(GB)。横摆率(GB)。
技术研发人员:克劳斯
受保护的技术使用者:采埃孚商用车系统欧洲有限公司
技术研发日:2020.08.12
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。