1.本发明涉及一种用于在车桥中的至少一个车桥上以不同侧不同作用的制动力进行制动时控制车辆的方法,以及控制系统和车辆。
背景技术:
2.不同侧不同的制动力可以例如当车辆在不同侧具有不同的摩擦系数的车道上制动时出现。在该情况中会发生车辆朝高摩擦系数方向的横摆运动。这会造成,在该行驶状况中不同侧不同的制动力作用在车桥的车轮上。由abs调节系统可以通过abs控制阀调整出不同侧不同的制动压力,以便在不同侧不同的制动力的情况中能够因车轮而异地抵抗抱死。因此,由abs控制阀因车轮而异地以不同的程度将制动压力降低至各自的滑转阈限,以便阻止各自车轮的抱死。
3.车辆在不同侧具有不同的摩擦系数的车道上制动时的横摆运动会由于能转向的车桥、尤其是前桥的与几何结构有关的转向运动而增强,其中,转向运动由于不同侧不同的制动力自动发生并且同样朝高摩擦系数方向定向。总而言之,车辆在对开路面制动的情况中以一定的制动横摆率横摆,该制动横摆率由于不同侧不同的制动力或制动压力以及由此得到的自动的转向运动而出现。
4.在其中一个前轮上突然发生意外的强烈减速时,类似的状况也可以在没有对开路面制动时存在。这可以例如是如下情况,即,在前轮上的其中一个abs控制阀或车轮制动器的其中一个制动缸,例如制动缸的复位机构发生故障。此外,也可以存在损坏的车轮轴承。其它故障也是能想到的,这些故障导致在能转向的前桥上不期望地出现不同侧不同的制动力并因此发生车辆的不同侧不同程度的制动。在这种状况中也会发生车辆朝相应的方向的横摆运动,其中,该横摆运动可能由于能转向的前桥的转向运动而被增强,其中,转向运动由于不同侧不同的制动力自动发生。总而言之,在前桥上以不同侧不同的制动力进行制动时,车辆以一定的制动横摆率横摆,该制动横摆率由于不同侧不同的制动力或制动压力以及由此得到的自动的转向运动而出现。
5.为了使车辆在所提到的状况中保持在行车轨迹中并避免所导致的不稳定,所得到的制动横摆率通过驾驶员以相应的转向干预来完全抵抗,从而将车辆的实际横摆率调整到以不同侧不同的制动力进行制动之前在前桥上作用的目标横摆率。通常,在这些不期望的状况中对驾驶员的要求是苛刻的,这是因为这些不期望的状况仅很少地发生。在高的车辆速度的情况中的相反地转向需要即刻且充分的转向干预,以便使车辆保持在行车轨迹中。然而,大多情况都是以非常高的反应时间反应和/或不充分地反应,从而非常有可能离开行车轨迹。由此对周边交通和车辆本身造成危险。
6.带有对行车制动的一般性作用的传统的自动化稳定调节系统不能够在上述状况中抵抗所导致的制动横摆率,这是因为它们不能够将能转向的车桥的由于以不同侧不同的制动力进行制动所导致的转向运动与由驾驶员给定的转向角区分开。因此,稳定调节系统
将实际横摆率或由制动所导致的制动横摆率与由于当前调整出的转向角而所期望的目标横摆率进行比较并且确定它们相匹配。因此,检测不到不稳定的状态并且不能自动化地对其进行干预。
7.为了抵抗制动横摆率,在de 10 2007 038 575 b4中描述了:在识别到转向不足或转向过度或者转向不足的开始或转向过度的开始的情况下增大或减小能转向的车桥的转向角,以便通过转向干预来抵抗由制动所导致的制动横摆率。
8.在de 10 2011 120 667中设置的是,在识别到车辆由于其制动器因侧而异地受驱控而发生倾斜时,也附加地增大或减小转向的车桥的转向角,以便抵抗由于因侧而异的制动驱控所导致的转向过度或转向不足。
9.然而,在这两个所提到的转向干预中所不利的是,仅当已经存在车辆的不稳定状态时才进行干预。然而,这根据车辆速度有可能已经太迟了,从而车辆已经离开其行车轨迹并且可能不再能够阻止不稳定,这是因为不再能够控制车辆而不对周边交通或车辆本身造成危险。
技术实现要素:
10.因此,本发明的任务是,说明一种用于控制车辆的方法,利用该方法能够避免在以不同侧不同的制动力进行制动期间的危及安全的状况。该任务还说明了一种控制系统和一种车辆。
11.该任务通过根据权利要求1的方法以及根据另外的独立权利要求的控制系统和车辆来解决。从属权利要求说明了优选的改进方案。
12.因此,根据本发明设置的是,为了在能转向的车桥上以不同侧不同作用的制动力进行不期望的制动时控制车辆,首先确定在能转向的车桥上是否存在以不同侧不同作用的制动力进行的意外制动,其中,由于在能转向的车桥上不同侧不同作用的制动力使车辆以制动横摆率朝横摆方向横摆;并且接着获知由于不同侧不同作用的制动力使车辆横摆的横摆方向。此外,一旦确定了在能转向的车桥上的以不同侧不同作用的制动力进行的意外制动或在确定了之后立即地,就给定并调整出转向角请求,其中,依赖于获知的横摆方向来给定转向角请求,使得在调整出转向角请求之后在能转向的车桥上抵偿制动横摆率。
13.因此有利的是,当识别出在能转向的车桥上的以不同侧不同作用的制动力的意外或不期望的制动时,就已经自动化地进行了干预,更确切地说随后立即地且不依赖于所导致多强的制动横摆率和是否存在不稳定的行驶状态地自动化地进行了干预。因此,在确定了不期望的或意外的制动的情况下在形成不同侧不同的制动力的同时就可以相反地转向,以便立即抵抗制动横摆率或对其进行抵偿。因此,从一开始就可以阻止离开行车轨迹和随后有可能发生的不稳定的行驶状态,这是因为在车辆由于以不同侧不同的制动力不期望或意外制动而发生很小横摆运动时就已经受到转向式干预,从而离开行车轨迹和不稳定根本就不会得到发展。因此,能够不再出现由于转向过度或转向不足而导致的车辆的侧滑或离开行车轨迹,这是因为不像在现有技术中那样当不稳定被识别到并且其已经存在时才进行干预。
14.以不同侧不同的制动力的不期望或意外的制动在此被理解为如下制动:其中,由于不希望的影响突然引起不期望的一侧的制动力,驾驶员无法对所述制动力做出反应。这
可能由于主动的制动干预,例如在具有不同摩擦系数的车道上的对开路面制动而发生,或者在有或没有主动干预的情况下也由于车辆的因车轮而异地影响能转向的车桥上的制动力的部件的故障或失效而发生。
15.因此,可能由于配属于能转向的车桥的受制动的车轮的abs控制阀或车轮制动器中的至少一个abs控制阀或车轮制动器的故障或失效和/或由于能转向的车桥的受制动的车轮的至少一个车轮轴承的故障或失效而出现不期望的或意外的制动。然而也能想到其他的部件,这些部件由于故障或失效会对能转向的车桥上的制动力产生因车轮而异的影响。
16.由于这种故障或失效或者对开路面制动导致了车辆以特定的制动横摆率横摆,驾驶员无法对该制动横摆率做出反应,其中,横摆相应地朝较高的制动力的方向定向。同时,通过在能转向的车桥上的不同侧不同的制动力也使能转向的车桥的转向角朝着横摆方向调设,而这也增强了效应。
17.在此优选设置的是,确定在能转向的前桥上的以不同侧不同作用的制动力进行的意外制动。然而,优选地也能想到其他能转向的车桥。
18.在故障或失效的情况中,也可以在不存在制动规则的情况下确定在能转向的车桥上的以不同侧不同作用的制动力进行的意外制动。然而,通常仅在存在制动规则的情况中才检查是否发生以不同侧不同的制动力进行的意外制动。
19.根据优选的实施形式设置的是,在转向调节的范围中在能转向的车桥上给定并调整出转向角请求,使得当前存在的实际横摆率逼近给定的目标横摆率,尤其是直至实际横摆率相当于给定的目标横摆率。因此,以有利的方式给定了这种转向角请求,通过该转向角请求使车辆保持在行车轨迹中,其中,在出现制动横摆率并因此出现以不同侧不同的制动力进行的意外制动时立即输出并调整出相应的转向角请求,通过该转向角请求使实际横摆率朝目标横摆率的方向调准。在此,调准可以根据pi调节器的类型来实现,从而实现快速且无跳变的自动化的转向。
20.在此,根据优选的改进方案设置的是,在确定在能转向的车桥上的以不同侧不同作用的制动力进行的不期望的制动之前,从车辆中存在的实际横摆率推导出目标横摆率。因此,以简单的方式可以将在意外制动之前存在的转向运动,例如转弯,假设为初始状态,根据本发明在意外制动时调节到该初始状态。
21.此外,优选地设置的是:
[0022]-依赖于在能转向的车桥的不同侧不同地受制动的车轮上的制动压力之间的制动压力差和/或
[0023]-依赖于在能转向的车桥的不同侧不同地受制动的车轮上的车轮转速之间的车轮转速差和/或
[0024]-依赖于在能转向的车桥的不同侧不同地受制动的车轮上的车轮速度之间的车轮速度差
[0025]
来确定在能转向的车桥上是否存在以不同侧不同作用的制动力进行的不期望的制动。因此,能够以简单的方式并且根据终归在车辆中检测的测量参量来识别是否存在意外的制动,其中,制动压力差、车轮转速差和车轮速度差是对意外制动的精确且当前的指示。
[0026]
为此,优选设置的是,当制动压力差超过最大的制动压力差和/或车轮转速差超过
最大的车轮转速差和/或车轮速度差超过最大的车轮速度差时,推断出在能转向的车桥上的以不同侧不同作用的制动力进行的不期望的制动。由此可以精确地规定干预时间点并且也可能允许在正常行驶状况中不严重的相应的差。
[0027]
根据改进方案设置的是,也依赖于制动压力差和/或车轮转速差和/或车轮速度差来获知横摆方向。根据这些差的符号能够以简单的方式识别并且也有利地预知车辆由于意外制动所发生的横摆运动的方向。根据在不同的制动压力的情况下出现的制动压力差或者其他差可以直接识别出当不进行转向式干预时车辆朝哪个横摆方向开始横摆。由此,在制动横摆率已经构建之前在构建有制动压力差的同时就可以相反地转向。因此,可以更快速地做出反应。
[0028]
根据优选的改进方案,可以在abs控制阀起作用的情况中从abs控制信号估计出制动压力差,其中,依赖于abs控制信号通过abs控制阀以因侧而异的方式调适被调控到车轮制动器上的制动压力用以形成制动压力差,并且/或者从通过在各个车轮上的车轮转速传感器获知和输出的车轮转速来获知车轮转速差和/或车轮速度差。
[0029]
因此,能够以简单的方式得到制动压力信息和车轮转速信息,而不使用附加的传感器。在此,制动压力信息可以从给定到abs控制阀上的先导压力和对各自的abs控制阀的驱控时间估计出,通过abs控制阀实现制动压力的压力保持或压力减少。因此,如果存在更低的摩擦系数,那么各自的abs控制阀必须比在具有高摩擦系数的一侧上的abs控制阀更频繁地进行干预,以便阻止抱死,由此能够推导出制动压力并以此推导出车桥的车轮之间的制动压力差。
[0030]
此外,优选设置的是,通过能电控制的转向系统在能转向的车桥、优选前桥上自动化地实施转向角请求。因此,能够得到自动化转向的快速的反应时间,以便在意外的和不期望的制动时控制车辆。
[0031]
此外,优选设置的是,依赖于车辆的轮胎和/或车道特性和/或车桥负载和/或能转向的车桥的轮距以及磨胎半径和/或车辆速度来给定转向角请求。因此,也能够有利地考虑其他标准,这些标准可以对在带有不同摩擦系数的车道上的制动行为具有作用并且可以因此对在转向中的自动化的干预具有影响。
[0032]
此外,优选设置的是,能够依赖于经由方向盘操控的转向力矩来调整出能转向的车桥的转向角,其中,由于被操控的转向力矩使驾驶员横摆率作用到车辆上,其中,当起作用的驾驶员横摆率与制动横摆率相反指向时允许被操控的转向力矩,否则就抑制。因此也可以允许通过方向盘的手动的转向干预,只要该手动的转向干预不导致离开行车轨迹或不稳定并且抵抗意外的或不期望的制动。由此,在不导致增强制动横摆率的情况下也可以实现带有制动的靠边或超车。
[0033]
根据本发明的用于在能转向的车桥上以不同侧不同作用的制动力进行不期望的制动时控制车辆的控制系统(利用该控制系统尤其是能够实施根据本发明的方法)具有能电子控制的制动系统和用于在能转向的车桥上调整出转向角请求的能电子控制的转向系统,其中,根据本发明设置的是如下这样地构造控制系统:
[0034]-确定在能转向的车桥上是否存在以不同侧不同作用的制动力进行的意外制动,并且获知由于不同侧不同作用的制动力使车辆横摆的横摆方向;并且
[0035]-一旦确定了在能转向的车桥上的以不同侧不同作用的制动力进行的意外制动,
就给定并通过能电子控制的转向系统调整出转向角请求,其中,可以依赖于获知的横摆方向来给定转向角请求,使得在调整出转向角请求之后能够在能转向的车桥上抵偿制动横摆率。
[0036]
此外,根据本发明还设置了具有这种控制系统的车辆。
附图说明
[0037]
下面根据多个附图详细阐述本发明,其中:
[0038]
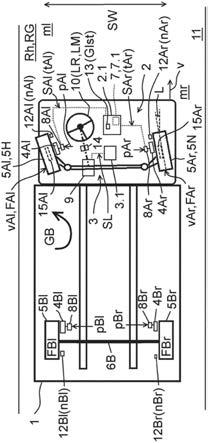
图1示出具有能电子控制的制动系统和能电子控制的转向系统的车辆;
[0039]
图2示出根据本发明的方法的流程图。
具体实施方式
[0040]
图1示意性示出了具有能电子控制的制动系统2和能电子控制的转向系统3的车辆1,能电子控制的制动系统和能电子控制的转向系统共同形成控制系统100,其用于尤其是在车辆1的前桥6a上以不同侧不同作用的制动力far、fal制动车辆1期间控制车辆1。能电子控制的制动系统2以已知的方式具有制动控制装置2.1(该制动控制装置可以因车轮而异地驱控车桥6a、6b的各个车轮5ar、5al、5br、5bl上的车轮制动器4ar、4al、4br、4bl),以便根据手动的或自动化的制动规则bv来对车辆1进行制动,使得在各自的车轮5ar、5al、5br、5bl上调整出特定的制动力far、fal、fbr、fbl。在此,制动由稳定调节系统7来监控,该稳定调节系统估计并相应地干预车辆1的稳定,以便避免不稳定或抵抗这种不稳定。
[0041]
在此,稳定调节系统7的组成部分尤其是abs调节系统7.1,该abs调节系统依赖于所获知的各个车轮5ar、5al、5br、5bl的车轮转速nar、nal、nbr、nbl来监控滑转值并且在一个或多个车轮5ar、5al、5br、5bl即将抱死时通过abs控制阀8ar、8al、8br、8bl因车轮而异地调适被调控到车轮制动器4ar、4al、4br、4bl上的制动压力par、pal、pbr、pbl。通过abs控制阀8ar、8al、8br、8bl可以例如保持或减少制动压力par、pal、pbr、pbl,以便避免车轮5ar、5al、5br、5bl的抱死。为此,abs控制阀8ar、8al、8br、8bl例如具有入口阀-出口阀组合。
[0042]
例如由制动控制装置2.1以一定的调节周期通过abs控制信号sar、sal、sbr、sbl因车轮而异地驱控abs控制阀8ar、8al、8br、8bl,以便实现在各自的车轮制动器4a、4b上的压力保持或压力减少。然而,用于各自的车桥6a、6b的abs控制逻辑在此也可以集成在能电子控制的车桥模块中,能电子控制的车桥模块产生相应的abs控制信号sar、sal、sbr、sbl。
[0043]
除了制动系统2外,还设置有能电子控制的转向系统3,通过能电子控制的转向系统能够自动化地经由转向执行器9来调设能转向的车桥6a、6b、优选是前桥6a或另外的附加桥的车轮5ar、5al、5br、5bl的转向角l。接下来,这根据能转向的前桥6a来描述。为此,设置有转向控制装置3.1,转向控制装置能够为转向执行器9给定转向信号sl。此外,前桥6a上的前轮5ar、5al的转向角l也可以手动地由驾驶员通过方向盘10以如下方式来调设:驾驶员在转向方向lr上施加特定的转向力矩lm。在该情况中,前桥6a的转向可以例如通过叠加转向来实现。
[0044]
如果车辆1以特定的车速v在不同侧具有不同摩擦系数ml、mr的车道11上运动并且尤其是前桥6a上的车轮制动器4ar、4al由于制动规则bv通过制动系统2来操纵,那么在因侧而异的abs调节的情况中不同大小的制动力far、fal作用在前轮5ar、5al上。在此,abs调节
系统7.1通过不同的调节周期或者通过因侧而异地不同的abs信号sar、sal负责将不同的制动压力par、pal调控到前轮5ar、5al的车轮制动器4ar、4al上,以便避免前轮5ar、5al在不同侧具有不同的摩擦系数ml、mr的车道11上的抱死。这也作为对开路面制动bmu(μ-split-bremsung)而已知。在此,处于车道11的具有两个摩擦系数ml、mr中较高摩擦系数的那侧上的前轮5ar、5al在下文中被称为高摩擦系数前轮5ha,而处于车道11的具有两个摩擦系数ml、mr中较低摩擦系数的那侧上的前轮5ar、5al在下文中被称为低摩擦系数前轮5na。
[0045]
由于被调控到前轮5ar、5al的车轮制动器4ar、4al上的不同的制动压力par、pal和由此不同侧不同作用到车辆1的前桥6a上的制动力far、fal,促成车辆1的具有制动横摆率gb的一定的横摆,制动横摆率尤其是与前桥6a的轮距sw有关。在此,制动横摆率gb在高摩擦系数方向rh上定向,也就是说,车辆1朝高摩擦系数前轮5ha的方向横摆;因此在图1的示例中向左横摆。当前轮5ar、5al被制动时,在这种对开路面制动bmu的情况中由于不同地调整出的制动压力par、pal而在前桥6a上同时引起具有特定的转向角l的转向运动,其中,转向运动同样在高摩擦系数方向rh上定向。在此,所引起的转向角l尤其是与摩擦系数差dm=ml
–
mr有关,其中,摩擦系数差又与制动压力差dp=pal
–
par或者也与车轮转速差dn=nal
–
nar有关。此外,转向角l与车辆几何结构、例如磨胎半径(主销偏距)有关。
[0046]
然而原则上,在没有通过abs调节系统7.1主动进行制动干预的情况下会由于对开路面制动bmu而在能转向的前桥6a上存在以不同侧不同的制动力far、fal进行的类似不期望的和意外的制动。当至少一个配属于前轮5ar、5al的abs控制阀8ar、8al或者在前轮5ar、5al上的车轮制动器4ar、4al(制动缸)发生故障时,例如也会出现前桥6a上一侧强烈的制动力改变。由此也会在前轮5ar、5al上得到不期望的不同的制动压力par、pal或不同侧不同的制动力far、fal和因此不同的车轮转速nal、nar。此外,由于前轮5ar、5al的车轮轴承15ar、15al中的一个车轮轴承的故障也会发生前桥6a上一侧制动力far、fal的改变,其中,在该状况中也出现前轮5ar、5al上的不同的车轮转速nal、nar。
[0047]
因此,当车辆1的因车轮而异地影响前桥6a(或者通常是能转向的车桥)上的制动力far、fal的部件存在故障或失效时,一般也会在前桥6a上出现不期望的一侧制动力far、fal的改变。由此,同样导致了车辆1的具有特定的制动横摆率gb的横摆,该横摆与前桥6a的轮距sw有关并且该横摆朝前桥6a上的较高的制动力far、fal的方向定向。
[0048]
当前轮5ar、5al被不同程度地制动时,如也在对开路面制动的情况中那样,在这种一侧故障的情况中在能转向的前桥6a上引起具有特定的转向角l的转向运动。转向运动朝与车辆以制动横摆率gb横摆相同的那个方向定向,也就是说朝前桥6a上的较高制动力far、fal的方向定向。在此,所引起的转向角l尤其是与前轮5ar、5al的所出现的制动压力差dp=pal
–
par或车轮转速差dn=nal
–
nar有关或者车轮速度val、var之间的由此得出的车轮速度差dv=val
–
var有关。此外,转向角l与车辆几何结构,例如磨胎半径(主销偏距)有关。
[0049]
在刚刚描述的故障的情况中或也在上面描述的对开路面制动bmu的情况中或者一般来说在能转向的前桥6a上以不同侧不同的制动力far、fal进行的意外的或不期望的制动中(其中,分别发生转向角的变化),所需要的是,驾驶员快速且充分地通过方向盘10以修正方式进行干预,以便尤其是保持行车轨迹或者不从车道偏离,这是因为否则会发生对车辆1以及周边交通的危害。为了使驾驶员减负(这是因为驾驶员通常不能适应这种状况并因此过迟和/或不能充分地干预),根据本发明设置的是,一旦确定不期望且意外地发生了在能
转向的前桥6a上以不同侧不同的制动力far、fal进行的制动,就通过转向系统3自动化地经由转向执行器9来进行干预。
[0050]
这根据图2以如下方式实现,即,在开始的步骤st0中检查是否存在手动的或自动化的制动规则bv,并且在随后的第一步骤st1中检查,是否在能转向的车桥、在此是前桥6a上存在以不同侧不同的制动力far、fal进行的制动。这可以例如根据制动压力差dp=pal
–
par和/或车轮转速差dn=nal
–
nar和/或车轮速度差dv=val
–
var来识别出。
[0051]
如果不能直接由测量来获知在能转向的前桥6a上的制动压力par、pal和制动压力差dp,那么能够对它们进行估计,其中,这在对开路面制动bmu的情况中可以依赖于如下abs控制信号sar、sal来来实现,该abs控制信号导致在能转向的前桥6a上的abs控制阀8ar、8al的特定的驱控时间tar、tal或调节周期。从这些驱控时间tar、tal能够连同已知的、输送给abs控制阀8ar、8al的先导压力至少估计出制动压力差dp,其中,可预见的是,针对低摩擦系数前轮5na存在更频繁的驱控并因此存在各自的abs控制阀8ar、8al的更高的驱控时间tar、tal,这是因为为了阻止抱死而在该低摩擦系数前轮5na上需要比在高摩擦系数前轮5ha上更频繁的干预。因此,可以从给定的最大制动压力差dpmax推导出以不同侧不同的制动力进行的制动。然而,只有当前桥6a上的abs控制阀8ar、8al本身未发生故障并且不是不同侧不同的制动力far、fal的诱因时,这种估计才能够实现。
[0052]
另外一种可能是,直接从车轮转速信号获知车轮转速nal、nar或车轮转速差dn,车轮转速信号由前轮5ar、5al上的车轮转速传感器12ar、12al输出。如果在能转向的车桥或前桥6a上与当前存在的制动规则bv相一致的、特定的给定的最大车轮转速差dnmax被超出,那么就推断出在能转向的车桥或前桥6a上以不同侧不同的制动力far、fal进行的意外制动。替选地,也可以从车轮转速nal、nar或车轮转速差dn获知车轮速度差dv=val
–
var,车轮速度差又与给定的最大车轮速度差dvmax进行比较。在此,在超出的情况中也可以推断出在能转向的前桥6a上以不同侧不同的制动力far、fal进行的意外制动。
[0053]
在此,获知在能转向的前桥6a上是否存在以不同侧不同的制动力far、fal进行的意外制动可以在制动控制装置2.1、尤其是在稳定调节系统7或abs调节系统7.1中实现。
[0054]
在接下来的第二步骤st2中,在确定了在能转向的前桥6a上存在以不同侧不同的制动力far、fal进行的意外制动之后,获知该意外制动在哪个横摆方向rg上定向或者车辆1由于该意外制动预计将以制动横摆率gb在哪个横摆方向rg上横摆。这例如从车轮转速差dn或制动压力差dp或车轮速度差dv的符号得出,这是因为对于具有较大制动力far、fal的前轮5ar、5al(在对开路面制动bmu的情况中是高摩擦系数前轮5ha)而言至少暂时地预期有比对于具有较小制动力far、fal的前轮5ar、5al而言更小的制动压力par、pal或更小的车轮转速nar、nal或更小的车轮速度var、val。根据情况而定的,制动压力差dp=pal
–
par或车轮转速差dn=nal
–
nar或车轮速度差dv=val
–
var是正的或是负的。因此,可以根据它们来预知车辆1将在哪个横摆方向rg上横摆或者制动横摆率gb将具有哪种符号。
[0055]
接着在第三步骤st3中,依赖于在能转向的前桥6a上以不同侧不同的制动力far、fal进行的意外制动期间的定向或制动横摆率gb的符号或横摆方向rg,在后继的转向调节lg的范围中产生转向角请求lsoll并且例如通过转向控制装置3.1以转向信号sl输出给转向执行器9。在此,转向角请求lsoll被规定成使制动横摆率gb受到抵抗。也就是说,转向角请求lsoll导致前桥6a上的抵偿制动横摆率gb的转向角l。因此,在构建出制动横摆率gb之
前,在意外构建出不同侧不同的制动力far、fal的同时就可以通过转向角请求lsoll来相反地转向。
[0056]
在这种转向调节lg开始时,可以在第一子步骤st3.1中例如设定用于转向角请求lsoll的根据经验所获知的起始值wl。接着,从该起始值出发,在第二子步骤st3.2中持续地监控车辆1的实际横摆率gist并且将之与目标横摆率gsoll进行比较,以便获知车辆1对转向角请求lsoll做出的反应。只要在实际横摆率gist和目标横摆率gsoll之间存在偏差,那么就继续调适转向角请求lsoll,直至实际横摆率gist和目标横摆率gsoll在某一容差之内相一致。在此,调节可以例如根据pi调节器的类型来进行,以便在没有跳变的情况下得到快速然而也“平顺”的调节。在此,实际横摆率gist可以例如由稳定调节系统7来提供,稳定调节系统终归获知该实际横摆率用于进一步的稳定调节,从而不需要另外的传感器。
[0057]
在此,可以如下这样地规定用于转向调节lg的目标横摆率gsoll:在能转向的前桥6a上没有发生以不同侧不同的制动力far、fal进行的意外制动时持续不断地获知车辆1的实际横摆率gist并且将之例如存储在存储装置13中。一旦在第一步骤st1中推断出在能转向的前桥6a上存在以不同侧不同的制动力far、fal进行的意外制动,那么实际横摆率gist的在该确定之前最后存储的值就被规定为目标横摆率gsoll并且转向调节lg基于该目标横摆率。因此,如果车辆在这种意外制动时例如处于转弯或超车状态,那么也可以考虑驾驶员最初给定的转向运动。如果车辆1笔直地向前行驶,那么可以假设目标横摆率gsoll近似为零。
[0058]
如果实际横摆率gist与目标横摆率gsoll相一致,那么在第四步骤st4中维持转向请求lsoll,这是因为制动横摆率gb通过主动转向被自动化地抵偿或均衡并且车辆1因此以最初的行车轨迹继续行驶。因此,离开行车轨迹或车道以及有可能的所造成的不稳定和因而对车辆1本身以及周边交通的危害可以通过该转向调节lg来有效地避免。
[0059]
通过所描述的自动化的转向调节lg确保的是:当以不同侧不同的制动力far、fal进行的意外制动被引入时就立即发生通过转向请求lsoll的转向干预,而不是当车辆由此已经离开行车轨迹且可能已经存在不稳定时才进行转向干预。由此能够较少地进行修正式的转向干预,这是因为制动横摆率gb在其刚开始产生时就立即被抵抗,而不是当车辆由于该制动横摆率离开或滑出行车轨迹时才被抵抗。由此可以明显减少与最初的行车轨迹的偏差。此外,自动化的转向基于电子调节而具有比手动转向更少的反应时间,从而可以使对于车辆1本身和周边交通而言危及安全的影响的风险最小化。
[0060]
此外,在第三子步骤3.3中,可以在转向调节lg的情况下考虑驾驶员是否补充地以转向的方式进行干预,例如对以不同侧不同的制动力far、fal进行的意外制动做出反应和/或通过导入经制动的行车轨迹变换。为此,例如可以通过与转向系统3的扭杆协同作用的力传感器14来获知由驾驶员通过方向盘10施加的转向力矩lm。当通过转向力矩lm将抵抗制动横摆率且也如自动化的转向请求lsoll那样抵偿该制动横摆率的驾驶员横摆率gf作用到车辆1上时,那么转向系统3允许依赖于转向力矩lm来影响转向角l。如果驾驶员给定在相当于转向执行器9的转向方向lr的转向方向lr上的手动转向,那么这就被允许。但是,如果驾驶员在相反的转向方向lr上转向,也就是说,驾驶员横摆率gf增强了制动横摆率gb,那么可以通过转向系统阻止其实现,以便不产生不稳定和离开行车轨迹的风险。
[0061]
补充地,在第四子步骤st3.4中,在存在对开路面制动bmu作为造成以不同侧不同
的制动力far、fal进行的意外制动的原因的情况下所设置的是,在abs调节系统7.1中进行对abs制动调节的调适,其中,由此可以缩短车辆1在对开路面制动bmu期间的制动路程。abs制动调节可以在对开路面制动bmu期间通常根据改良的个体调节(mir)来实现。为此,在识别到对开路面制动bmu的情况下首先使高摩擦系数前轮5ha上的制动压力par、pal降低到在低摩擦系数前轮5na上调整出的制动压力par、pal,从而存在为零的制动横摆率gb。为了由此不丢失制动力,高摩擦系数前轮5ha上的制动压力par、pal接着又缓慢地以压力构建梯度dpg升高至滑转阈限。在此,压力构建梯度dpg通常被规定为使得驾驶员已经能够对所得到的制动横摆率gb做出反应。
[0062]
因为在根据本发明的转向调节lg中根据步骤st3、st3.1、st3.2、st3.3通过转向执行器9实现了自动化的转向调节lg,那么可以由此得出,可以在mir的范围中对高摩擦系数前轮5ha上的压力升高做出非常快速且充分的反应。因此,压力构建梯度dpg可以相应地被升高,这是因为通过转向执行器9利用与之相协调的转向梯度dlg也能够对由此得到的快速提升的制动横摆率gb快速地做出反应。由此能够相对于正常的mir缩短制动路程,这是因为高摩擦系数前轮5ha上的制动压力par、pal又能够被较快地提升。同时,通过利用相应高的转向梯度dlg快速且自动化地调适转向角l能够使车辆1保持在行车轨迹中,从而由此得到相对于现有技术而言的组合性的效果。
[0063]
此外,通常在转向调节lg的范围中可以设置的是,依赖于其他标准来规定转向角请求lsoll,其中,可以考虑作为标准的是例如在各自的车桥6a、6b上的车桥负载kl、所使用的轮胎kb的选定、轮距sw和前桥6a的磨胎半径、车辆速度v以及车道11的车道特性kf。
[0064]
在此,所描述的用于通过控制系统100控制车辆1的方法可以在制动系统2的制动控制装置2.1中尤其是作为稳定调节系统7的一部分来执行。为此,稳定调节系统7可以在软件端和/或硬件端被相应地扩展。在此,制动控制装置2.1已经经由车辆1中的can总线提供了大部分所使用的特征量并且也可以已经存在到电转向系统3的连接,从而仅需要很少的调适。
[0065]
附图标记列表(说明书的一部分)
[0066]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆
[0067]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
能电子控制的制动系统
[0068]
2.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
制动控制装置
[0069]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
能电子控制的转向系统
[0070]
3.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向控制装置
[0071]
4ar、4al
ꢀꢀꢀꢀꢀꢀꢀꢀ
前桥的车轮制动器(右、左)
[0072]
4br、4bl
ꢀꢀꢀꢀꢀꢀꢀꢀ
后桥的车轮制动器(右、左)
[0073]
5ar、5al
ꢀꢀꢀꢀꢀꢀꢀꢀ
前轮(右、左)
[0074]
5br、5bl
ꢀꢀꢀꢀꢀꢀꢀꢀ
后轮(右、左)
[0075]
5ha
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
高摩擦系数前轮
[0076]
5na
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
低摩擦系数前轮
[0077]
6a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
前桥
[0078]
6b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
后桥
[0079]7ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
稳定调节系统
[0080]
7.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
abs调节系统
[0081]
8ar、8al
ꢀꢀꢀꢀꢀꢀꢀꢀ
前桥上的abs控制阀
[0082]
8br、8bl
ꢀꢀꢀꢀꢀꢀꢀꢀ
后桥上的abs控制阀
[0083]9ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向执行器
[0084]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方向盘
[0085]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车道
[0086]
12ar、12al
ꢀꢀꢀꢀꢀꢀ
前轮上的车轮转速传感器
[0087]
12br、12bl
ꢀꢀꢀꢀꢀꢀ
后轮上的车轮转速传感器
[0088]
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储装置
[0089]
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
力传感器
[0090]
15ar、15al
ꢀꢀꢀꢀꢀꢀ
前轮5ar、5al的车轮轴承
[0091]
100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制系统
[0092]
bmu
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
对开路面制动
[0093]
bv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
制动规则
[0094]
dlg
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向梯度
[0095]
dm
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
摩擦系数差
[0096]
dn
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车轮转速差
[0097]
dnmax
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
最大的车轮转速差
[0098]
dp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
制动压力差
[0099]
dpmax
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
最大的制动压力差
[0100]
dpg
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
压力构建梯度
[0101]
dv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车轮速度差
[0102]
dvmax
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
最大的车轮速度差
[0103]
far、fal
ꢀꢀꢀꢀꢀꢀꢀꢀ
前轮上的制动力
[0104]
fbr、fbl
ꢀꢀꢀꢀꢀꢀꢀꢀ
后轮上的制动力
[0105]
gb
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
制动横摆率
[0106]
gf
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
驾驶员横摆率
[0107]
gist
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
实际横摆率
[0108]
gsoll
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
目标横摆率
[0109]
kb
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轮胎
[0110]
kf
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车道特性
[0111]
kl
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车桥负载
[0112]
l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向角
[0113]
lg
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向调节
[0114]
lm
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向力矩
[0115]
lr
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向方向
[0116]
lsoll
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向角请求
[0117]
mr、ml
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车道摩擦系数(右、左)
[0118]
nar、nal
ꢀꢀꢀꢀꢀꢀꢀꢀ
前轮的车轮转速(右、左)
[0119]
nbr、nbl
ꢀꢀꢀꢀꢀꢀꢀꢀ
后轮的车轮转速(右、左)
[0120]
par、pal
ꢀꢀꢀꢀꢀꢀꢀꢀ
前轮的制动压力(右、左)
[0121]
pbr、pbl
ꢀꢀꢀꢀꢀꢀꢀꢀ
后轮的制动压力(右、左)
[0122]
rg
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
横摆方向
[0123]
rh
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
高摩擦系数方向
[0124]
sar、sal
ꢀꢀꢀꢀꢀꢀꢀꢀ
前桥上的abs控制信号(右、左)
[0125]
sbr、sbl
ꢀꢀꢀꢀꢀꢀꢀꢀ
后桥上的abs控制信号(右、左)
[0126]
sl
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向信号
[0127]
sw
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轮距
[0128]
tar、tal
ꢀꢀꢀꢀꢀꢀꢀꢀ
abs控制阀的驱控时间
[0129]vꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆速度
[0130]
var、val
ꢀꢀꢀꢀꢀꢀꢀꢀ
前轮的车轮速度(右、左)
[0131]
wl
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
用于转向角请求lsoll的起始值
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。