1.本实用新型属于汽车领域,更具体的说涉及一种基于复眼的倒车影像装置。
背景技术:
2.目前市面上的泊车辅助系统主要有倒车雷达和倒车影像,倒车雷达通过声波识别障碍物;倒车影像通常采用广角镜头拍摄,以获得更大的车后方视角。
3.倒车雷达只能感应到与其处于同一水平面的障碍物,如果后方障碍物低于雷达的话,雷达则感应不到,存在安全隐患;倒车影像采用广角镜头拍摄会使影像失真,不利与驾驶人精准判断车与障碍物的距离。
技术实现要素:
4.本实用新型考虑一种基于复眼的倒车影像,既可以获取更大的车后视角,又能保证图像的真实性和高分辨率,方便驾驶员精准的判断车与障碍物的距离,同时复眼对动态特别敏感,在驾驶员到车过程中出现移动的目标时,驾驶员能够快速从影像中感知到移动的目标,及时采取安全措施;本实用新型还通过图像识别技术识别影像中的障碍物,并通过红色线框对障碍物进行标定;本实用新型还根据驾驶员意愿设定距离辅助线,辅助驾驶员安全高效的泊车。
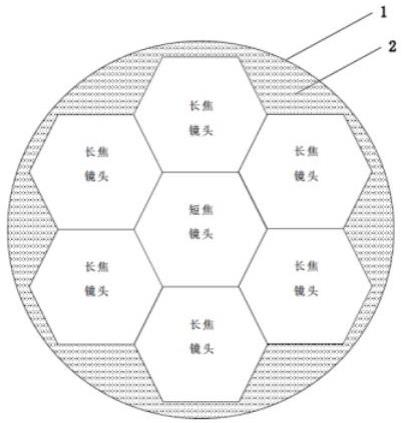
5.为了实现上述目的,本实用新型是采用以下技术方案实现的:所述倒车影像装置包括金属外壳1、橡胶2,复眼摄像装置3、控制器模块4、显示屏5,复眼摄像装置3包括多部配有长焦镜头的摄影机和配有短焦镜头的摄影机,金属外壳1用于保护摄影机镜头,橡胶2用于固定摄影机镜头,复眼摄像装置3安装在汽车后保险杠中间位置;所述控制器模块4耦合连接于复眼摄像装置3和显示屏5,接收汽车操纵杆发出的档位讯号,并将复眼摄像装置3所摄影像处理后传输至显示屏5;所述供电电源为复眼摄像装置3、控制器模块4及显示屏5供电。
6.优选的,所述控制器模块4包括滤波电路6、dc-dc电路7、视频缓存电路8、视频处理电路9、图像识别单元10和处理器11,所述处理器11接收来自复眼摄像装置3发送的信号,然后把信号发到图像融合电路14,图像融合电路14将图像融合后把信号发到图像识别单元10,图像识别单元10识别出障碍物后把信号发送至视频处理电路9,视频处理电路9将信号处理后发送至视频缓存电路8,视频缓存电路8发送至显示屏5进行显示;所述dc-dc电路7将供电电源提供的电压转换成合适的供电电压,然后经过滤波电路6滤波处理,处理掉波纹及噪声。
7.优选的,所述处理器11集成有长焦视频处理电路12、短焦视频处理电路13、图像融合电路14、图像处理电路15、复位电路的pcb板,所述长焦视频处理电路12、短焦视频处理电路13用于图像采集和处理,将采集到的光信号转换为电信号,图像融合电路14用于影像合成,复位电路用于电复位。
8.优选的,所述的图像融合电路14集成由图像配准、图像预处理和图像融合,所述图
像配准对7部摄像头所采集的图像进行配准,配准之后将信号发送至图像预处理,图像预处理之后由图像融合模块进行图像融合。
9.优选的,图像识别单元10集成有图像预处理模块、图像编码模块、图像检测模块、图像特征提取模块、数据库和控制单元,所述图像预处理模块对图像进行全局预处理,所述图像编码模块对图像进行编码压缩,所述图像检测模块进行障碍物检测,获得预处理图像中的障碍物,所述图像特征提取模块对检测到障碍物后的图片进行特征提取,所述数据库中存有在倒车过程中常见的障碍物图像,所述控制单元把带有障碍物的图片和数据库中的图片进行对比,将障碍物相似度高的图像进行标定后发送至图像处理电路15。
10.优选的,所述图像处理电路15对图像识别单元10处理后的图像进行障碍物和根据驾驶员意愿设定的距离进行辅助线标注,并提高障碍物的对比度和影像亮度,在输出视频中显示相应的信息。
11.本实用新型有益效果:
12.本实用新型既可以获取更大的车后视角,又能保证图像的真实性和高分辨率,方便驾驶员精准的判断车与障碍物的距离,同时复眼对动态特别敏感,在驾驶员到车过程中出现移动的目标时,驾驶员能够快速从影像中感知到移动的目标,及时采取安全措施;本实用新型还通过图像识别技术识别影像中的障碍物,并通过红色线框对障碍物进行标定;本实用新型还根据驾驶员意愿设定距离辅助线,辅助驾驶员安全高效的泊车。
附图说明
13.图1复眼摄像头装置图;
14.图2控制器连接框图;
15.图3图像融合电路14各模块连接图;
16.图4图像识别单元10各模块连接图;
17.图5控制器模块原理图;
18.图6视频处理电路原理图;
19.图中、1-金属外壳、2-橡胶,3-复眼摄像装置、4-控制器模块、5-显示屏、6-滤波电路、7-dc-dc电路、8-视频缓存电路、9-视频处理电路、10-图像识别单元、11-处理器、12-长焦视频处理电路、13-短焦视频处理电路、14-图像融合电路、15-图像处理电路。
具体实施方式
20.为了便于本领域一般技术人员理解和实现本实用新型,现结合附图及具体实施例进一步描述本实用新型的技术方案
21.所述倒车影像装置包括金属外壳1、橡胶2,复眼摄像装置3、控制器模块4、显示屏5,复眼摄像装置3包括多部配有长焦镜头的摄影机和配有短焦镜头的摄影机,金属外壳1用于保护摄影机镜头,橡胶2用于固定摄影机镜头,复眼摄像装置3安装在汽车后保险杠中间位置;所述控制器模块4耦合连接于复眼摄像装置3和显示屏5,接收汽车操纵杆发出的档位讯号,并将复眼摄像装置3所摄影像处理后传输至显示屏5;所述供电电源为复眼摄像装置3、控制器模块4及显示屏5供电。
22.所述控制器模块4,包括滤波电路6、dc-dc电路7、视频缓存电路8、处理器11、视频
处理电路9和图像识别单元10,所述处理器11将复眼摄像装置3处的信号采集处理后发送至图像识别单元10,经过图像识别单元10进行障碍物识别后将信号发送至视频处理电路9,视频处理电路9进行障碍物对比度和亮度的标注以及距离辅助线的标注后将信号发送至视频缓存电路8,视频再由缓存电路发送至显示屏5进行显示;所述dc-dc电路7将供电电源提供的电压转换成合适的供电电压,然后经过滤波电路6滤波处理,处理掉波纹及噪声,各电路模块连接关系如图2所示。
23.所述处理器11采用arm系统嵌入式系统处理器,集成有长焦视频处理电路12、短焦视频处理电路13、图像融合电路14、图像处理电路15、复位电路的pcb板,所述长焦视频处理电路12处理配有长焦镜头的摄像机发送的信号,短焦视频处理电路13处理配有短焦镜头的摄影机发送的信号,经过处理后发送到图像融合电路14,图像融合电路14把图像处理融合后发送至图像识别单元10。
24.图像融合电路14各模块连接关系如图3所示,图像配准把来自7部摄影机所采集的图像进行配准后发送至图像预处理,图像预处理将图像全局预处理后把信号发送至图像融合,经图像融合后把信号发送至图像识别单元10。
25.图像识别单元10各模块连接关系如图4所示,图像识别单元10包括图像预处理模块、图像编码模块、图像检测模块、图像特征提取模块、数据库和控制单元。所述图像预处理模块对融合后的图像进行预处理,预处理过程中消除图像中的干扰信息并恢复有用的真实信息,图像预处理完成后把信号发送至图像编码模块,图像编码模块对预处理后的图像进行编码压缩,以去除视频中空间、时间维度的冗余,方便传输和储存视频,所述图像检测模块对图像进行障碍物的检测,然后把检测到障碍物的图像发送至图像特征提取模块,所述图像特征提取模块对检测到障碍物的图片进行特征提取,所述数据库中存有常见障碍物的图像,所述控制器与数据库和图像特征提取模块电连接,控制器将通过特征提取过后的图像与数据库的图像进行对比,然后把相似度高的图像发送至图像处理电路15,通过图像处理电路15提升障碍物的对比度和亮度并使用红色线框进行标定,图像处理电路15同时根据驾驶员的意愿对图像进行辅助线标注,这里为了方便说明,假设驾驶员意愿为在距离车身20cm、50cm、1m分别用红色、黄色、绿色辅助线标注,则可在输出的影像中在距离车身20cm、50cm、1m分别用红色、黄色、绿色辅助线标注。
26.本实用新型的有益效果是:通过设置复眼摄像装置3、控制器模块4,通过图像融合电路14、图像识别单元10和图像处理电路15,对摄影机采集到的影像进行融合、识别和处理,解决了常规倒车雷达和倒车影像不能全面清晰的传递给驾驶员车后信息的问题,能够给在倒车过程中的驾驶员提供更大的车后视角,更加清晰和真实的影像;同时,给与驾驶员障碍物和距离预警;同时,复眼摄像装置3对动态的物体特别敏感,拍摄的影像能够清晰的显示移动的目标,帮助驾驶人快速从影像中分辨出后方突然出现的行人或者其它移动目标,及时采取安全措施;同时,能够根据驾驶员的意愿对输出的影像进行距离辅助线的标注,辅助驾驶员安全高效的泊车。
27.本实用新型并不局限于上述实施方式,如果对本实用新型的各种改动和变形不脱离本实用新型的精髓和范围,仍属于本实用新型的权利要求和同等技术范围之内,则本实用新型意图包含这些改动和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。