1.本发明涉及一种用于运行条筒更换器的方法、一种为此设计的条筒更换器以及一种配设有所述条筒更换器的纺织机器。
背景技术:
2.条筒更换器用于自动地将填充有纤维材料的条筒更换为空的条筒,以便填充所述空条筒。
3.为此基本上有三个概念,在这三个概念的情况下为了条筒更换而使条筒运动:
4.第一个概念涉及所谓的旋转条筒更换器,使空条筒由导轨借助于具有通常三个臂的十字形转门围绕十字形转门的旋转中心点转圈地运动,其中满条筒借助于一个臂远离条筒填充位置地运动,借助于第二个臂使紧随的空条筒运动到条筒填充位置上并且第三臂这样旋转,使得其在下一次条筒更换时可以接收跟随满条筒的第二条筒。这种装置的缺点在于,具有用于满条筒和空条筒的导轨的构造在结构上是耗费的。
5.第二个概念涉及所谓的线性条筒更换器,在该线性条筒更换器中尤其大尺寸的条筒(例如具有1200mm的直径)基于其宽度沿纺织机器的生产方向线性地运动至条筒填充位置,并且在填充之后沿着同一方向或者成例如90
°
角度地继续运动。这种解决方案的缺点是,需要非常大的运动路径来运动所述条筒。另一个缺点在于,不能将这种类型的条筒更换器适应于较小的条筒,因为这种条筒推动器尤其是按照相应的条筒尺寸设计的。
6.第三个概念涉及一种条筒更换器,该条筒更换器的圈条头设置成能在两个条筒之间往复运动。这种概念的缺点是机械上耗费的结构和如下事实,即,所述概念不能应用于具有集成的条筒填充站的纺织机器(例如并条机、条卷机、精梳机),在这些纺织机器中圈条头是固定的。
技术实现要素:
7.本发明的任务在于应对前述缺点。
8.按照本发明,规定一种用于运行条筒更换器的方法。条筒更换器具有至少两个停放位置,亦即一个预停放位置和至少一个在沿着预定的运动路径的一个方向上在预停放位置下游设置的中间停放位置。条筒更换器还包括沿着所述一个方向在最后的中间停放位置下游设置的条筒填充位置和驱动区段。驱动区段包括驱动装置和与其运动作用连接的条筒推动器。驱动装置设计用于在操纵时使条筒推动器这样运动,使得条筒推动器使条筒沿着所述一个方向从预停放位置可选地运动至中间停放位置或者条筒填充位置。按照本发明,所述方法包括条筒更换过程。条筒更换过程具有第一子过程,当仅在预停放位置或者中间停放位置上存在条筒时,执行该第一子过程。第一子过程包括第一步骤,即这样操纵驱动装置,使得条筒推动器由初始位置出发沿着所述一个方向运动并且在这种情况下使条筒沿着所述一个方向运动到条筒填充位置上。在此,在条筒填充位置上可能存在的满的条筒自动移动远离条筒填充位置和停放位置。接着进行返回运动步骤,即条筒推动器沿另一个逆着
所述一个方向的方向沿着预定的运动路径运动到其初始位置。换言之,如果在两个停放位置上都存在条筒,则所述方法包括第二子过程。第二子过程包括第二步骤,即这样操纵驱动装置,使得条筒推动器由初始位置出发沿着所述一个方向运动并且在这种情况下使存在于预停放位置上的条筒沿着所述一个方向运动到中间停放位置上并且借助于运动的条筒自动地使存在于中间停放位置上的条筒沿着所述一个方向运动到条筒填充位置上。在这里,可能存在于条筒填充位置上的满条筒也自动远离地移动。接着再次进行上面提到的返回运动步骤。所述解决方案具有如下优点,即,与停放位置的占用情况无关,只要在其中一个停放位置上存在条筒,就总是可靠地使空条筒运动到条筒填充位置上。这也能实现:条筒更换器也可以以超过两个停放位置和/或具有其他直径的条筒运行;必要时需要调整运行参数。
9.优选所述方法具有条筒填充过程,当在条筒填充位置上存在待填充的条筒并且该待填充的条筒还要填充时,执行该条筒填充过程。再这种情况下,当待填充的条筒已填满时,执行条筒更换过程。
10.在此,条筒填充过程优选包括确定待填充的条筒何时已填满的步骤。以此,确保条筒总是在条筒更换之前已填满。
11.上述方法中的每个方法优选还包括确定步骤,在该确定步骤中,确定条筒处于哪个位置上。以此例如可以使条筒更换器更快速地运动,只要该条筒更换器没有推移条筒,亦即在空转的情况下运动。
12.备选地或者附加地,所述方法具有指示过程,当停放位置是空的并且在条筒填充位置上存在的条筒已填满时和/或条筒填充位置是空的时,执行该指示过程。指示过程包括指示反应。所述过程的目的在于,给人发信号,报告在下一个条筒更换过程中没有空条筒可以运动到条筒填充位置上,因为在任何一个预停放位置上都不存在空条筒,或者当前在条筒填充位置上不存在空条筒。由此,对于操作者来说能够优选及早地将空条筒安置到预停放位置上。但是备选地,操作者也可以设定不使空条筒运动到预停放位置上。在这种情况下,在填充当前的条筒之后腾空条筒填充位置,从而例如能够实施清洁工作。在此过程中,例如呈自动(紧急)关闭驱动区段和/或纺织机器的形式的安全反应也是可能的,该安全反应与条筒更换器耦联或者集成在条筒更换器中。
13.优选在每个上述方法中,仅当有条筒待填充并且要么条筒填充位置是空的要么处于条筒填充位置上的条筒已填满时,执行条筒更换过程。这确保,仅当临近条筒填充过程时,条筒才处于条筒停放位置上。如果没有这样的要求,则条筒填充位置优选保持空的,从而确保没有条筒不必要地运动到条筒停放位置上。
14.按照本发明的条筒更换器设计用于根据上述方法之一运行。条筒更换器具有开始时提到的组件、条筒填充区段和条筒更换区段。条筒填充区段设计用于填充处于条筒填充位置上的条筒。条筒更换区段具有前述驱动区段。条筒更换区段因此设计用于执行前述条筒更换过程。
15.条筒更换器优选还具有引导区段,借助于该引导区段沿着运动路径引导条筒推动器。这能实现在条筒更换器实际上设置用于较大条筒的情况下使用较小直径的条筒并且因此产生了同一个条筒更换器能够匹配于不同直径的条筒的可能性。因此增加了通用件的数量,这对制造成本具有有利的影响。
16.在此,除了沿着运动路径的可动性之外,条筒推动器可以刚性地设置或者构造。因
此可使用传统的条筒推动器。
17.备选地或者附加地,预停放位置优选向一侧敞开,该侧在预停放位置的区域中平行于运动路径或者与运动路径成锐角地延伸。以此可以将空条筒从条筒更换器的该侧或者优选与条筒推动器的运动路径成直角地安置到预停放位置上。由此,从功能上看,使条筒更换器的总长度保持最小化。当条筒更换器是例如并条机的组件时,这也促进了操作简便性。空条筒的安置不影响筒子架的布置结构。
18.再次备选地或者附加地,条筒更换器优选还具有条筒引导区段。条筒引导区段设计用于在中间停放位置与条筒填充位置之间沿着在所述两个位置的区域中的运动路径引导条筒。
19.每个前述条筒更换器可以具有传感器区段。传感器区段可以设计用于探测在预停放位置上、在中间停放位置上和/或在条筒填充位置上是否存在条筒。以此能够避免条筒更换过程中不必要的碰撞。备选地或者附加地,传感器区段能够确定处于条筒填充位置上的条筒距离填满有多远和/或处于条筒填充位置上的条筒何时填满。以此能够实现自动的条筒填充运行和条筒更换运行,而除了安置新的空条筒和运走相应的已填满的条筒之外不需要手动操作。为此例如可以使用非接触式的传感器(例如光栅)或者机械传感器(例如按钮)。如果传感器区段确定条筒推动器是否使条筒运动,则这例如能针对驱动区段的控制实现前述指示反应或者安全反应的自动触发。为此,例如可以这样使用按钮,使得该按钮指向条筒填充位置并且在碰撞条筒时操纵该按钮。如果传感器区段能够确定条筒推动器处于何处,则这能实现驱动区段最佳地运行。特别是,传感器区段可以设计用于确定条筒推动器和/或驱动区段是否已经到达在条筒推动器朝向条筒填充位置运动的范围内的至少一个预定位置。作为(附加的)传感器,在相应的位置处可以使用按钮,在条筒推动器碰撞或者运动经过时操纵该按钮。除此之外,传感器区段可以设计用于确定条筒推动器使多少空条筒运动。这能实现,在使两个空条筒运动的情况下,驱动区段仅运行至最靠近条筒填充位置的空条筒已经恰好到达该条筒填充位置。在这种情况下,驱动区段必须使条筒推动器仅朝向条筒填充位置运动其最大运动路径的大约一半,亦即在时间上看,在运动速度总是相同的情况下仅运行此期间的大约一半。再次备选地或者附加地,传感器区段设计用于确定何时开始返回运动步骤。这防止条筒推动器移出太远。
20.在每个前述条筒更换器中,驱动装置可以具有气动缸作为驱动器件。这是传统的驱动器件并且因此是低成本的。
21.备选地或者附加地,条筒更换器还可以具有一区段或者与这样的区段耦联,该区段设计用于在执行条筒更换过程时促使执行第一子过程或者第二子过程。也就是说,条筒更换器的同一个区段能够执行两个子过程。这降低了生产成本并且有利于整个条筒更换器的简单的结构。
22.优选在每个前述条筒更换器中,运动路径沿着直线延伸。这能实现条筒更换器的特别低成本的并且节省空间的构造方案。但同样重要的是,条筒更换器可以轻易地匹配于不同的条筒外部尺寸和条筒形状。
23.按照本发明的纺织机器具有加工区段,该加工区段设计用于根据预定的条件加工纤维材料。在输出侧,加工区段与前述条筒更换器之一耦联。因此条筒更换器能要么构造为纺织机器的组件要么构造为下游的、独立的机器部件。
24.优选条筒更换器集成到纺织机器中。这将纺织机器的整体尺寸保持在框架内。
25.如果条筒更换器的运动路径是直线,则在每个前述的纺织机器中的运动路径优选沿着纺织机器的纤维加工方向从加工区段延伸至条筒填充区段。因此特别是几乎或者完全不增大纺织机器横向于加工方向的宽度尺寸。
附图说明
26.本发明的其它特征和优点由以下对优选的实施方式的说明得出。
27.图中:
28.图1示出按照本发明的实施方式具有条筒更换区段的并条机,
29.图2示出图1的条筒更换区段的俯视图;
30.图3示出图1的条筒更换区段的两个立体的部分视图,
31.图4示出在存在三个条筒的情况下在两种运行状态下的图1的条筒更换区段,
32.图5示出在存在两个条筒的情况下在结束运行状态下的图1的条筒更换区段,以及
33.图6示出在仅存在一个条筒的情况下在结束运行状态下的图1的条筒更换区段。
具体实施方式
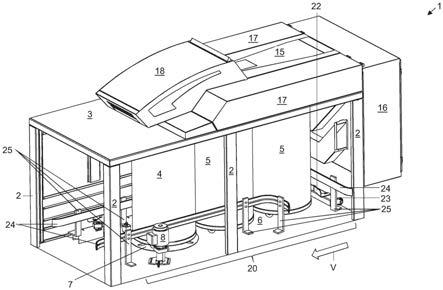
34.图1示出具有按照本发明的一个实施方式的条筒更换区段20的并条机1。并条机1在这里构造为不可调节的并且包括以已知的方式构造的、在这里未示出的牵伸区段。
35.牵伸区段包括牵伸机构罩18,该牵伸机构罩覆盖位于其下的牵伸机构和条筒存放设备。这两者是已知的并且不再说明。
36.沿着借助于方块箭头示出的加工方向v在牵伸机构上游设置喂入台15,通过该喂入台将纤维条以通常的方式从条筒经由筒子架喂入到牵伸机构中。在牵伸机构罩18的侧面存在侧罩17,该侧罩覆盖并条机1的其他组件,例如驱动皮带、牵伸机构的导向辊等。
37.沿着加工方向v在喂入台15上游,并条机1优选包括壳体16,在该壳体中示例性地安置有用于牵伸机构的抽吸通道和并条机1的控制装置。
38.牵伸区段以也已知的方式设置在并条机1的平板3上或者部分地(例如以条筒存放设备的圈条器的形式)集成到所述平板中。并条机1包括转盘7和使转盘旋转的马达8,待填充的条筒4在所述转盘上竖立在前述圈条器下方。在这里在条筒4的右边竖立有两个空条筒5。
39.平板3通过支柱2竖立在并条机1的底板6之上,从而产生用于条筒更换区段20的自由的空间。
40.条筒4、5在两个导向壁24之间沿着其运动路径被引导至转盘7并且在填充之后被引导远离转盘7和在图1中示出的空条筒5、5。
41.在右边的空条筒5的背离条筒5的一侧上存在条筒更换区段20的条筒推动器22。借助于在这里呈在图1中不可见的气动缸21形式的驱动器件使条筒推动器22示例性地沿着加工方向v从初始位置朝向转盘7运动并且此后又返回运动到其初始位置,在所述初始位置中可以将空条筒5从由右边推移到在这里已经竖立有右边的空条筒5的位置(预停放位置10)上。
42.如果在转盘7上没有条筒4,则条筒推动器22这样远地运动,直到要么在转盘7上探
测到(新的)条筒5要么直到条筒推动器22已经到达其朝向转盘7的最终位置。在第二种情况下,即,当在转盘7上没有探测到新的条筒4时,例如借助于在并条机1上的红色信号灯的闪烁发出信号,以便向外可见当前没有条筒可以填充。随之出现的是并条机1在安全反应的范围内也可以自动紧急关机。
43.图2示出条筒更换区段20的俯视图,而没有并条机1的在条筒4、5上方设置的元件。
44.在示出的实施例中,并条机1包括传感器9,该传感器这样设置,使得其探测在条筒填充位置12上的竖立的条筒4并且在条筒4向左远离条筒填充位置12运动时暂时探测到没有条筒4、5。传感器9可以包括光栅,该光栅的检测光束沿着转盘7的旋转轴线在示出的条筒4的背离空条筒5的边缘的区域中延伸。在此,检测光束优选在沿着加工方向v的与转台7的转动中心相交的线之外的区域中延伸。以此确保检测光束设置在如下区域中,在该区域上两个紧邻的条筒4、5在移动时不相互贴靠,如在图2中借助于位置14示出的那样。
45.如果在转盘7上已经存在因此填充的条筒4,则忽略传感器9的用于探测在转盘7上存在条筒4的信号,直至由该传感器发出在转盘7上不存在条筒4的信号。条筒4在此由两个、优选四个可枢转支承的杠杆13、13在转盘7上保持就位。
46.条筒推动器22在这里沿加工方向v移动最靠近它的条筒4、5并且一起推移可能在其下游设置的条筒4、5。
47.备选地,在底板6中设置机械开关,该开关从底板6以这种程度伸出,使得一旦条筒4、5处于转盘7上的条筒填充位置中(亦即在套筒填充位置12上),则所述开关可靠地由所述条筒操纵。开关也可以这样定位,使得该开关在多个条筒4、5的情况下在这些条筒移动时保持持续操纵。在这一点上,用于气动缸21的控制装置仅需要探测,条筒推动器22何时围绕条筒位置移动。如果在此期间不取消对开关的操纵,则现在位于条筒填充位置12上的条筒4事先已经位于中间停放位置11上。以此可以关闭气动缸21并且使条筒推动器22往回运动到按照图1或者图2的初始位置中。
48.以此确保可靠的运行。
49.图3示出图1的条筒更换区段20的两个立体的部分视图。特别是从图3b可看出,条筒推动器22在其背离气动缸21的端部上在这里借助于滑轮23在底板6上引导。在气动缸21的区域中,条筒推动器22同样可以借助于滚轮或者如在这里示出的那样滑动支承。条筒推动器22包括定心区段26,该定心区段将最靠近的条筒4可靠地在相互对置的导向壁24、24;24之间朝向转盘7推移。
50.条筒推动器22安装在可从气动缸21驶出的、不可见的活塞杆的在这里向前指向的端部上。在气动缸21的区域中,条筒推动器22借助于引导部27在这里在气动缸21下面优选滑动地引导,从而条筒推动器22相对于气动缸21可自由地运动。备选地,条筒推动器22例如可以通过在底板6中设置的凹槽沿着其运动路径引导。
51.导向壁24通过保持件25在这里固定在底板6上并且这样构造,使得条筒推动器22能够可靠地运动。
52.图4示出在存在三个条筒4、5、5的情况下在两种运行状态下的条筒更换区段20。在图4a中示出的状态下,条筒4已填满并且必须由空条筒5取代。为此,条筒推动器22在图4a中示出的初始位置中借助于气动缸21朝向转盘7运动。如果借助于在这里未示出的传感器9探测到,条筒5已经离开条筒填充位置12并且新的条筒4要运动到转盘7上(按照图4b的结束运
行状态),则操控气动缸21,使条筒推动器22再次往回运动到在图4a中示出的初始位置中。
53.图5示出在存在两个条筒4、5的情况下在结束运行状态下的条筒更换区段20。在此,气动缸21完全移出,其中,在条筒推动器22运动之前,条筒5处于哪个位置都一样。
54.图6示出在存在仅一个条筒4的情况下在结束运行状态下的条筒更换区段20。可看到满条筒4已经不运动。因此,如果条筒推动器22最大限度地运动,并且没有来自传感器9的、关于在条筒推动器运动期间条筒4、5在任何时间点位于其检测区域内的中间信号,则显然不存在空条筒5,从而绝对不可能填充条筒。也就是说,借助于简单的传感机构,并条机1为安全起见可以自动紧急关机,以便避免在牵伸机构中不必要地加工纤维材料并且因此避免废物。
55.在图2中右边的杠杆13可以这样构造,使得当右边的杠杆13从在图2中示出的转出位置由于运动经过的条筒5而在图2中向上转入时,该杠杆操纵或者松开作为传感器的优选机械的开关。由此得出如下用于运行并条机1的方案:
56.[0057][0058]
如可看到的那样,需要的是,右边的杠杆13必须在此期间转入。否则显然,条筒推动器22已经没有条筒4可以运动到条筒填充位置12上或者转盘7上。因此,不必探测在条筒更换过程之前在条筒推动器22和转盘12之间已经有多少条筒4、5。因此能够借助于最简单的传感机构确保并条机1在条筒填充方面可靠的运行。
[0059]
本发明不局限于上述实施方案。
[0060]
传感器区段可以设计用于探测,气动缸21的活塞已经到达中间驶出位置和/或最终驶出位置,所述中间驶出位置对应于使条筒推动器22已经推移条筒5到中间停放位置11上的位置,所述最终驶出位置对应于使条筒推动器22已经推移条筒5到条筒填充位置11上的位置。在此,传感器区段针对每个待探测的驶出位置具有检测传感器,该检测传感器例如探测条筒推动器22的(暂时的)存在。例如按钮适合于用作检测传感器,该按钮由运动经过的条筒推动器22或者气动缸21的活塞的连接部(暂时)操纵。与气动缸21朝向条筒填充位置12的运行相关联地,控制装置能够确定活塞已经经过哪个路径。如果检测传感器也还这样设置,使得它也可以探测到在相应的位置10、11上存在的条筒5,则可以省去用于位置10至12的单独的传感器。在极端情况下,用于中间停放位置11的唯一的传感器能满足:如果事
先、亦即在探测条筒推动器22运动经过之前没有触发检测传感器,则显然,条筒推动器22没有使条筒5运动到条筒填充位置12上。这能实现前述的指示反应和/或安全反应;无论如何使活塞再次往回运动。如果检测传感器事先仅触发一次,则显然,条筒推动器22当前运动仅一个条筒5。在这种情况下活塞必须运动到其最终驶出位置中。如果最终驶出位置对应于活塞的最大冲程,则不需要另外的传感器。如果活塞已经达到其最终驶出位置,则活塞再次往回运动。如果检测传感器事先已经触发两次,则显然,条筒推动器22当前运动两个条筒5。这意味着,条筒填充位置12已经被新的空条筒4占据,并且活塞22由检测传感器检测到之前,该活塞再次往回运动。现在检测传感器(间接地)探测到的是条筒5还是活塞或者条筒推动器22,可以根据自从气动缸21开始运行直至相应地触发检测传感器的运动速度和终止时间来确定。
[0061]
备选地或者附加地,在条筒推动器22上设置碰撞传感器,借助于该碰撞传感器可以探测到,条筒推动器22撞到条筒4、5。在最简单的情况下这是按钮。但是也可以提供非接触的接近传感器。如果碰撞传感器探测到对条筒4、5的撞击,并且活塞还没有到达其最终驶出位置,则对于控制装置来说,这是活塞仅还继续驶出对应于条筒5到最近的位置11、12上运动的路径的信号。如果在这种探测中活塞已经完全驶出,则对于控制装置来说,这是不存在空条筒5的信号,从而可以进行指示反应和/或安全反应。因此,在存在碰撞传感器的情况下,可以省去用于在条筒4、5的相应的存在情况方面监控停放位置10、11并且可能也监控条筒填充位置12的传感器。
[0062]
气动缸21可以由任何其他驱动器件、如可能具有连接的传动器的电动机取代。在这种情况下,用于监控活塞的驶出位置的传感机构可由相应的传感机构取代。在电动机用作驱动器件的情况下,可以使用旋转编码器,该旋转编码器的仪表盘或者编码盘例如可以不可相对转动地设置在电动机的驱动轴上。
[0063]
沿条筒更换方向在条筒填充位置12上游的条筒停放位置10、11的数量可以改变,至少为两个并且在条筒推动器结构的同一个构造方案中也可以减少到一个(预)停放位置。
[0064]
控制装置可以可匹配地设计如下,即,条筒推动器12针对条筒更换过程的运动路径匹配于待填充的条筒的相应的直径并且在运行中甚至可以变化,只要导向壁24允许。导向壁24例如可以设置成能通过凹槽在底板6上移动,从而并条机1也可以转变为具有较大直径的条筒。这同样适用于杠杆13;这些杠杆例如必须能在图4a中水平地运动并且能在不同的(锁定)位置中止动。
[0065]
保持件25例如可以通过间距保持件安装在支柱2上。
[0066]
附加于或者备选于用于探测何时在条筒填充位置12上存在条筒4的传感机构,也可以设有停放位置10、11的监控器。
[0067]
再次附加地或者备选地,可以设置一种传感机构,该传感机构监控当前已填充的条筒4的填充状态。由此可以识别出,何时条筒4必须用空条筒5取代,从而可以全自动地进行整个过程。
[0068]
即使由预停放位置10至条筒填充位置12的运动路径示出为沿着沿并条机1的加工方向v的一条直线延伸,运动路径也可以以任何形状延伸,例如弧形的形状和/或与加工方向v成0
°
至180
°
角度的形状。在弧形的情况下条筒推动器22可以沿着弧线引导,其中,作为驱动器件,例如可以设有集成在条筒推动器22中的马达,该马达示例性地驱动滑轮23。
[0069]
优选并条机1具有控制装置或者与这样的控制装置耦联,该控制装置可以自动执行条筒填充过程和条筒更换过程。
[0070]
导向壁24构造为部分弯曲的,以便形成用于要在预停放位置上安置的条筒5的端部止挡并且使条筒5的运动朝向条筒填充位置12偏转。导向壁可以具有任何其他形状并且例如构造为直的。
[0071]
优选预停放位置10朝向在图1中向前指向的一侧敞开,以便能实现条筒5的推入。不过同样可能的是,将预停放位置设计成在另一个位置处敞开,只要条筒推动器22的初始位置沿朝向转盘12的运动方向处于条筒5之后。
[0072]
条筒更换区段20可以集成到用于将纤维材料存放在圆条筒或者矩形条筒中的任何设备中,例如集成到处于梳理机下游的纯条筒存放设备、精梳机和条卷机中。
[0073]
结果是本发明提供一种相当简单构建的并且低成本的解决方案,利用尽可能多的通用件可以将用于各种的条筒尺寸的条筒更换器简单地集成到现有的设备中。
[0074]
附图标记列表
[0075]1ꢀꢀ
并条机
[0076]2ꢀꢀ
支柱
[0077]3ꢀꢀ
平板
[0078]4ꢀꢀ
待填充的/满的条筒
[0079]5ꢀꢀ
空条筒
[0080]6ꢀꢀ
底板
[0081]7ꢀꢀ
转盘
[0082]8ꢀꢀ
马达
[0083]9ꢀꢀ
传感器
[0084]
10 预停放位置
[0085]
11 中间停放位置
[0086]
12 条筒填充位置
[0087]
13 定心杠杆
[0088]
14 位置
[0089]
15 喂入台
[0090]
16 壳体
[0091]
17 侧罩
[0092]
18 牵伸机构罩
[0093]
20 条筒更换区段
[0094]
21 气动缸
[0095]
22 条筒推动器
[0096]
23 滑轮
[0097]
24 导向壁
[0098]
25 保持件
[0099]
26 定心区段
[0100]
27 引导部
[0101]vꢀꢀ
加工方向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。