1.本发明涉及医疗设备技术领域,尤其涉及一种神经调控系统。
背景技术:
2.随着技术的发展,一种非侵入性神经调控技术:经颅磁刺激(transcranial magnetic stimulation,简称tms)的出现,在临床神经精神疾病及康复领域获得越来越多的认可,它是一种研究人类神经生理学的技术,具有非侵入且无痛的特点,也可以用于一些神经系统疾病的治疗。
3.现有的医疗设备领域,关于经颅磁刺激治疗设备的操作都是通过人工操作或支架固定控制tms线圈。整个操作过程很不方便,需要人工长时间手持tms线圈或者利用支架固定一个特定角度;目标用户在整个过程中需要保持固定姿势、不可乱动,乱动后需要重新进行操作,用户体验非常不好,另外,人工定位的方式也不够精准。
技术实现要素:
4.本发明提供一种神经调控系统,用以解决现有技术中操作经颅磁刺激治疗设备的过程困难,且在操作过程中由于目标对象可能发生移动导致定位精准度差的缺陷,实现经颅磁刺激治疗设备的自动操作,且在操作过程中实现精准定位。
5.本发明提供一种神经调控系统,所述系统包括:视觉信息采集模块和调控模块,所述视觉信息采集模块和所述调控模块通信连接;
6.所述调控模块包括:控制单元、第一定位单元、机械臂和经颅磁刺激线圈,所述机械臂与所述控制单元通信连接;
7.所述视觉信息采集模块,用于采集所述第一定位单元和目标对象对应的视觉信息,并将所述视觉信息发送给所述控制单元,所述第一定位单元和所述目标对象位于所述视觉信息采集模块的采集区域内,所述第一定位单元安装在所述机械臂的末端;
8.所述经颅磁刺激线圈安装在所述机械臂的末端,用于紧贴在所述目标对象的头部;
9.所述控制单元,用于获取所述机械臂的位置信息,并基于所述视觉信息和所述机械臂的位置信息,控制所述机械臂运动。
10.根据本发明提供的一种神经调控系统,以所述视觉信息采集模块为中心建立第一坐标系,以所述目标对象为中心建立第二坐标系和以所述机械臂为中心建立第三坐标系;
11.所述控制单元,用于预先确定所述第一坐标系与所述第二坐标系之间的第一空间关系,和所述第一坐标系和所述第三坐标系之间的第二空间关系;
12.所述控制单元,用于基于所述视觉信息,确定所述目标对象的面部信息,以及所述面部信息在所述第二坐标系下的第一坐标信息;基于所述第一空间关系,确定所述第一坐标信息在所述第一坐标系中的第二坐标信息;基于所述第二空间关系,确定所述第二坐标信息在所述第三坐标系中的第三坐标信息;基于所述第三坐标信息和所述机械臂的位置信
息,控制所述机械臂运动。
13.根据本发明提供的一种神经调控系统,所述控制单元,用于当所述第三坐标信息和所述机械臂的位置信息不一致时,控制所述机械臂向所述第三坐标信息所在位置运动。
14.根据本发明提供的一种神经调控系统,所述调控模块还包括:线圈夹持装置,所述线圈夹持装置安装在所述机械臂末端的法兰上,用于夹持所述经颅磁刺激线圈,所述第一定位单元安装在所述线圈夹持装置上。
15.根据本发明提供的一种神经调控系统,所述调控模块还包括:线缆夹持装置、线缆和波纹管,所述波纹管用于包封所述线缆;
16.所述线缆夹持装置用于将被所述波纹管包封的所述线缆固定在所述机械臂上。
17.根据本发明提供的一种神经调控系统,所述调控模块还包括六维力传感器,所述六维力传感器位于所述机械臂的末端内部,用于控制所述经颅磁刺激线圈紧贴在所述目标对象的头部。
18.根据本发明提供的一种神经调控系统,所述控制单元,用于加载图像数据,基于所述图像数据构建三维模型,以使目标用户基于所述图像数据和所述三维模型规划治疗路径。
19.根据本发明提供的一种神经调控系统,所述视觉信息采集模块包括:摄像头支架和多目摄像头,所述多目摄像头安装在所述摄像头支架的顶端,用于采集所述采集区域内所述第一定位单元和所述目标对象对应的所述视觉信息。
20.根据本发明提供的一种神经调控系统,所述系统还包括:第二定位单元和绑带,所述第二定位单元安装在所述绑带上;
21.所述安装有所述第二定位单元的绑带,用于捆绑在所述目标对象的头部;
22.所述视觉信息采集模块,用于基于所述第二定位单元,监测所述目标对象的头部位置信息,并将所述目标对象的头部位置信息发送给所述控制单元;
23.所述控制单元,用于基于所述视觉信息、所述机械臂的位置信息和所述目标对象的头部位置信息,控制所述机械臂运动。
24.根据本发明提供的一种神经调控系统,所述系统还包括:手持探针;
25.所述手持探针,用于在所述视觉信息采集模块的所述采集区域内,获取所述目标对象的面部信息,并通过所述视觉信息采集模块将所述面部信息发送给所述控制单元;
26.所述控制单元,用于基于所述机械臂的位置信息和所述目标对象的面部信息,控制所述机械臂运动。
27.本发明提供的神经调控系统包括:视觉信息采集模块和调控模块,视觉信息采集模块和调控模块通信连接;调控模块包括:控制单元、第一定位单元、机械臂和经颅磁刺激线圈,机械臂与控制单元通信连接;视觉信息采集模块,用于采集第一定位单元和目标对象对应的视觉信息,并将视觉信息发送给控制单元,第一定位单元和目标对象位于视觉信息采集模块的采集区域内,第一定位单元安装在机械臂的末端;经颅磁刺激线圈安装在机械臂的末端,用于紧贴在目标对象的头部;控制单元,用于获取机械臂的位置信息,并基于视觉信息和机械臂的位置信息,控制机械臂运动,可见,本发明通过控制单元控制机械臂运动,无需人工操作,且,在整个操作过程中,基于视觉信息采集模块的视觉信息采集结果反馈至控制单元,控制机械臂运动,实现了整个操作过程中的精准定位。
附图说明
28.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
29.图1是本发明提供的神经调控系统的结构示意图之一;
30.图2是本发明提供的神经调控系统的结构示意图之二;
31.图3a是本发明提供的神经调控系统的结构示意图之三;
32.图3b是本发明提供的神经调控系统的结构示意图之四
33.图4是本发明提供的神经调控系统的结构示意图之五;
34.图5是本发明提供的神经调控系统的结构示意图之六;
35.图6是本发明提供的神经调控系统的结构示意图之七;
36.图7是本发明提供的神经调控系统的结构示意图之八;
37.图8是本发明提供的神经调控系统的结构示意图之九;
38.图9是本发明提供的神经调控系统的结构示意图之十。
具体实施方式
39.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.下面结合图1-图9描述本发明的神经调控系统。
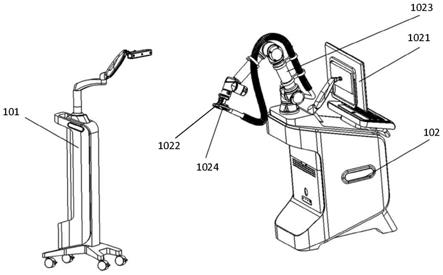
41.本发明实施例提供了一种神经调控系统,如图1所示,该系统包括:视觉信息采集模块101和调控模块102,视觉信息采集模块101和调控模块102通信连接;
42.调控模块102包括:控制单元1021、第一定位单元1022、机械臂1023和经颅磁刺激线圈1024,机械臂1023与控制单元1021通信连接;
43.视觉信息采集模块101,用于采集第一定位单元1022和目标对象对应的视觉信息,并将视觉信息发送给控制单元1021,第一定位单元1022和目标对象位于视觉信息采集模块101的采集区域内,第一定位单元1022安装在机械臂1023的末端;
44.经颅磁刺激线圈1024安装在机械臂1023的末端,用于紧贴在目标对象的头部;
45.控制单元1021,用于获取机械臂的位置信息,并基于视觉信息和机械臂1023的位置信息,控制机械臂1023运动。
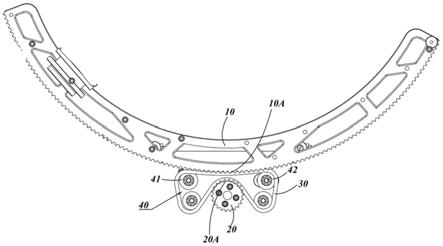
46.其中,图1中第一定位单元1022和经颅磁磁刺激线圈1024在机械臂1023末端的具体示意,见图2。其中,第一定位单元1022为黑白格棋盘。
47.其中,视觉信息为基于视觉信息采集模块101采集的连续的图像信息,图像信息包括目标对象和第一定位单元1022。
48.一个具体实施例中,预先以视觉信息采集模块101为中心建立第一坐标系,以目标对象为中心建立第二坐标系和以机械臂1023为中心建立第三坐标系;
49.控制单元1021,用于预先确定第一坐标系与第二坐标系之间的第一空间关系,和
第一坐标系和第三坐标系之间的第二空间关系;
50.控制单元1021,用于基于视觉信息,确定目标对象的面部信息,以及面部信息在第二坐标系下的第一坐标信息;基于第一空间关系,确定第一坐标信息在第一坐标系中的第二坐标信息;基于第二空间关系,确定第二坐标信息在第三坐标系中的第三坐标信息;基于第三坐标信息和机械臂1023的位置信息,控制机械臂1023运动。
51.其中,控制单元1021可以为计算机,调控模块102为台车。
52.其中,计算机的主机安装在调控模块102的内部,整个台车结构紧凑,占用空间较小,用户体验好。此时的控制单元1021包括计算机的主机和计算机的显示器。
53.具体的,视觉信息采集模块101,用于采集第一定位单元1022和目标对象的面部的视觉信息,以通过计算机完成不同坐标下的空间转换。
54.具体的,以目标对象为中心建立第二坐标系时,一般以目标对象的眉心、鼻根、鼻尖、左外眼角、左内眼角、右外眼角、右内眼角等作为目标对象的面部特征点,其中,面部特征点和面部信息为同一概念。
55.具体的,通过人脸识别算法确定视觉信息中目标对象的面部特征点,以及各个面部特征点在第二坐标下的坐标,其中,面部特征点至少为四个,且,四个面部特征点不共面。
56.具体的,确定第一空间关系得具体实现如下所示:
57.步骤一:获取目标对象的各个面部特征点分别在第一坐标系和第二坐标系下对应的坐标;
58.步骤二:对第一坐标系下的坐标和第二坐标下的坐标,利用奇异值分解(singular value decomposition,简称svd)进行配准,得到配准结果;
59.步骤三:基于配准结果对第二坐标系下的面部特征点进行优化,以得到配准误差小于预设值时对应的面部特征点,其中,配准结果包括配准误差;
60.步骤四:基于配准误差小于预设值时对应的面部特征点,得到第一空间关系。
61.具体的,确定第二空间关系的具体实现如下所示:
62.步骤一:在视觉信息采集模块101的采集区域内,拖动机械臂1023末端,将安装于机械臂1023的线圈夹持装置上的第一定位单元1022移动至多个位置,每移动一个位置,同时采集在第一坐标系和第三坐标系下该位置的坐标。其中,移动的位置的个数至少为四个,且,该四个位置不共面。
63.步骤二:对第一坐标系和第三坐标系下的坐标,利用奇异值分解(singular value decomposition,简称svd)进行配准,得到配准结果。
64.步骤三:基于配准结果,得到第二空间关系。
65.一个具体实施例中,控制单元1021,用于当第三坐标信息和机械臂1023的位置信息不一致时,控制机械臂1023向第三坐标信息所在位置运动。
66.一个具体实施例中,如图3a和图3b所示,调控模块102还包括:线圈夹持装置301,线圈夹持装置301安装在机械臂1023末端的法兰上,用于夹持经颅磁刺激线圈1024。其中,线圈夹持装置301上包括第一定位单元1022。
67.一个具体实施例中,如图4所示,调控模块102还包括:线缆夹持装置401、线缆402和波纹管403,波纹管403用于包封线缆402;线缆夹持装置401用于将被波纹管403包封的线缆402固定在机械臂1023上。
68.一个具体实施例中,调控模块102还包括六维力传感器,六维力传感器位于机械臂1023的末端内部,用于控制经颅磁刺激线圈1024紧贴在目标对象的头部。
69.具体的,由于机械臂1023内置六维力传感器,使得控制单元1021控制机械臂1023在垂直于经颅磁刺激线圈1024表面向目标对象头部的方向施加一定程度的力,使经颅磁刺激线圈1024紧贴在目标对象的头皮表面,并且,在机械臂1023运动过程中,经颅磁刺激线圈1024也始终紧贴在头部,避免目标对象头部晃动而使经颅磁刺激线圈1024脱离目标对象的头部。
70.一个具体实施例中,线缆夹持装置401包括:至少一个波纹管锁定夹。
71.一个具体实施例中,如图5所示,视觉信息采集模块101包括:摄像头支架501和多目摄像头502,多目摄像头502安装在摄像头支架501的顶端,用于采集视觉信息采集模块101对应的采集区域内第一定位单元1022和目标对象对应的视觉信息。
72.具体的,多目摄像头502采集第一定位单元1022和目标对象的头部对应的视觉信息,以用于使控制单元1021计算目标对象的头部位姿。进而,基于计算得到的目标对象的头部位姿控制机械臂1023运动,减低了用户操作的工作强度,并且,减少了用于人为因素导致的定位误差,使得经颅磁刺激线圈1024定位更加精确。
73.一个具体实施例中,控制单元1021,用于加载图像数据,基于图像数据构建三维模型,以使目标用户基于图像数据和三维模型规划治疗路径。
74.其中,图像数据为医学影像数据,该数据通过第三方医学设备采集得到,并通过第三方医学设备发送给控制单元1021。当然,也可以从第三方医学设备中将图像数据拷贝至控制单元1021。其中,计算机的显示器可以显示图像数据和三维模型。
75.其中,图像数据包括:二维医学影像数据和三维医学影像数据,二维医学影像数据可以为nii、nii.gz、dcm、dicom等格式的电子计算机断层扫描(ct)、核磁共振成像(mri)或标准图谱等数据,在计算机的显示器中呈现医学影像的轴位面、冠状面、矢状面,三维医学影像数据为包括有目标对象的stl三维数据。
76.其中,nii是神经影像的数据存储标准(nifti)格式的文件;nii.gz也是nifti格式的文件;dcm文件是一种数位成像,可以用来存储各种图形信息;dicom指医疗数字影像传输协定格式的文件。
77.具体的,目标对象基于图像数据和三维模型,规划治疗路径,例如,规划单靶点路径、多靶点路径和靶点矩阵等,并且,也可以在三维模型中获取目标对象的面部信息。
78.其中,规划单靶点路径和规划多靶点路径规划是在目标对象的相关数据上设置靶点以及方位点,以靶点和方位点构成的向量作为路径方向;规划靶点矩阵的路径是在设置矩阵行列数及行列间距后,在目标对象的三维模型上通过拾取三维模型上的点,以该点为矩阵中心位置,生成贴合在三维模型表面的靶点矩阵,靶点矩阵上每个靶点的路径方向为该靶点在三维模型上的点法向量。
79.其中,相关数据包括图像数据和三维模型。
80.一个具体实施例中,如图6所示,该系统还包括:第二定位单元601和绑带602,第二定位单元601安装在绑带602上。安装有第二定位单元601的绑带602,用于捆绑在目标对象的头部;视觉信息采集模块101,用于基于第二定位单元601,监测目标对象的头部位置信息,并将目标对象的头部位置信息发送给控制单元1021;控制单元1021,用于基于视觉信
息、机械臂1023的位置信息和目标对象的头部位置信息,控制机械臂1023运动。
81.其中,第二定位单元601为黑白格棋盘。
82.可见,本发明可以通过人脸识别算法,确定视觉信息中目标对象的面部特征点,以及各个面部特征点在第一坐标系下的坐标,以得到目标对象的位姿信息,具体场景可参见图7。其中,在图7中以目标对象为人进行示意。
83.本发明还可以通过视觉信息采集模块101采集第二定位单元601,提取第二定位单元601在第一坐标系下的坐标,以得到目标对象的位姿信息,具体场景可参见图8。其中,在图8中以目标对象为人进行示意。
84.一个具体实施例中,如图9所示,该系统还包括:手持探针901;手持探针901,用于在视觉信息采集模块101的采集区域内,获取目标对象的面部信息,并将面部信息发送给控制单元1021;控制单元1021,用于基于机械臂1023的位置信息和目标对象的面部信息,控制机械臂1023运动。
85.具体的,在视觉信息采集模块101的采集区域内,将手持探针901的尖端部分位于目标对象的面部特征点处,采集手持探针901的尖端在第一坐标系下的坐标,并将所述手持探针901的尖端在第一坐标系下的坐标作为目标用户在第一坐标系下的坐标。
86.其中,此时的面部特征点至少为四个,且四个面部特征点不共面。在该过程中,无需进行人脸识别算法对视觉信息中的目标对象的面部信息进行识别的处理操作。
87.本发明提供的神经调控系统包括:视觉信息采集模块和调控模块,视觉信息采集模块和调控模块通信连接;调控模块包括:控制单元、第一定位单元、机械臂和经颅磁刺激线圈,机械臂与控制单元通信连接;视觉信息采集模块,用于采集第一定位单元和目标对象对应的视觉信息,并将视觉信息发送给控制单元,第一定位单元和目标对象位于视觉信息采集模块的采集区域内,第一定位单元安装在机械臂的末端;经颅磁刺激线圈安装在机械臂的末端,用于紧贴在目标对象的头部;控制单元,用于获取机械臂的位置信息,并基于视觉信息和机械臂的位置信息,控制机械臂运动,可见,本发明通过控制单元控制机械臂运动,无需人工操作,且,在整个操作过程中,基于视觉信息采集模块的视觉信息采集结果反馈至控制单元,控制机械臂运动,实现了整个操作过程中的精准定位。
88.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。