1.本发明涉及锂电池回收技术领域,尤其涉及一种锂电池线性传感探测式初步拆解装置及方法。
背景技术:
2.锂电池的梯次利用和回收主要基于环境保护、资源节省、有利可图三个方面。一.环境保护:锂电池的正极材料里包含镍、钴、锰、锂等重金属元素,这些重金属元素会对环境、水等造成污染;负极材料里面的碳材、石墨等会造成粉尘污染;此外,锂电池的电解液中含有有毒的化学成分,也会造成氟污染。二.资源节省:锂电池中含有大量的金属元素,镍、石墨等我国比较多,但是像钴之类的金属元素是我国稀缺的;中国的锂元素绝对含量很多,但是开采难度比较大,一般都分布在条件比较艰苦的矿山;盐湖锂里面镁离子含量比较高,提取锂的难度也很大。三.有利可图:做锂电池的梯次利用及资源化回收还是能形成商业化的,因为最近几年汽车行业大量转入电动化,锂电池需量增加,导致上游的贵金属材料价格非常高。而在锂电池进行回收拆解过程中,锂电池内部可能存在大量鼓包,电路控制主板、各中元件挤压偏移等问题,从电池盒可外表可能无法直接看出。传统的人工暴力拆解,不仅容易损伤电池盒内部的元件,导致锂电池内部组件的回收利用率降低,还存在较大的安全隐患。
技术实现要素:
3.本发明要解决的技术问题是提供一种锂电池线性传感探测式初步拆解装置及方法,从而有效避免了对内部电池鼓包、未知主板位置等的直接破坏,既安全又能够提高废旧锂电池内部元件的可回收率。
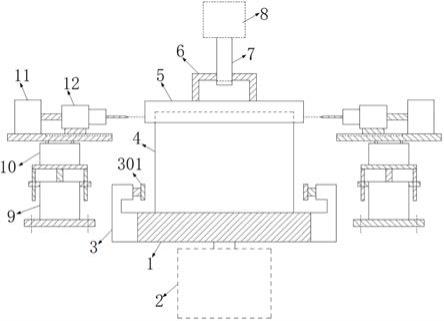
4.为解决上述技术问题,本发明是通过以下技术方案实现的:本发明涉及一种锂电池线性传感探测式初步拆解装置,拆解装置包括承载台上,承载台下方配置有用于驱动承载台转动的转动装置。承载台上侧放置电池盒,电池盒上侧设有电池盖,电池盖上侧活动连接有盒盖提手,承载台一组对侧方位固定安装有边侧夹持机构,盒盖提手悬挂有挂钩,挂钩上端连接有提升机构,提升机构配置用于驱动连接挂钩的动力装置、用于传感检测挂钩向上拉力大小的传感模块和用于传感检测挂钩行程运动的位置检测模块;承载台的外围固定设有一组升降装置,升降装置上侧驱动连接有升降台,升降台上侧固定安装有横移装置,横移装置上侧驱动连接有平移台,平移台上侧固定安装有纵移装置,平移台上侧导向安装有切割装置,纵移装置驱动连接切割装置。
5.作为本发明中锂电池线性传感探测式初步拆解装置的一种优选技术方案:边侧夹持机构内侧方位设置有用于夹持固定电池盒的夹持推进板,边侧夹持推进板嵌入安装有压力传感模块,夹持机构内置用于驱动夹持推进板的驱动装置。
6.作为本发明中锂电池线性传感探测式初步拆解装置的一种优选技术方案:升降装置包括朝上设置的升降轴杆,升降轴杆上端与升降台的中间位置固定连接,升降台下侧面
的边角位置固定安装有支撑导向杆,升降装置外环侧固定设置有边侧导向板,边侧导向板开设有导向通槽,支撑导向杆向下穿过边侧导向板的导向通槽。
7.作为本发明中锂电池线性传感探测式初步拆解装置的一种优选技术方案:横移装置上侧配置有若干组横移导轮,平移台下侧面设有若干导槽结构,横移装置上侧的横移导轮配合安装在平移台下侧面的导槽结构位置处。
8.作为本发明中锂电池线性传感探测式初步拆解装置的一种优选技术方案:横移装置内置伸缩动力装置,横移装置一侧设有与伸缩动力装置连接的横移驱动轴,横移装置另一侧设有横移导向轴;横移装置开设有用于横移驱动轴、横移导向轴导向运动的导轨或通槽结构;平移台下侧面的两侧端都固定安装有联动固定架,横移驱动轴、横移导向轴与各自方位的联动固定架固定连接。
9.作为本发明中锂电池线性传感探测式初步拆解装置的一种优选技术方案:纵移装置包括纵移轴杆,纵移轴杆侧端与切割装置连接,切割装置下侧固定安装有导向滑板,平移台上侧面开设有导向槽,切割装置下侧的导向滑板配合安装在平移台上侧面的导向槽位置处,切割装置包括朝向电池盖侧边的切割片。
10.作为本发明中锂电池线性传感探测式初步拆解装置的一种优选技术方案:横移装置驱动平移台的运动方向与纵移装置驱动切割装置的运动方向相互垂直。
11.本发明涉及一种锂电池线性传感探测式初步拆解方法,包括以下步骤:㈠根据当前流水线上的电池盒、电池盖的规格尺寸,通过工控机预设边侧夹持机构、升降装置、横移装置、纵移装置的驱动运动参数。
12.㈡未分离电池盖的电池盒放置在承载台上,承载台两侧的边侧夹持机构动作,两侧的夹持推进板相对推进的距离和两侧夹持推进板上传感检测到的挤压力相同时,完成电池盒的夹持操作,并通过人工将盒盖提手悬挂在挂钩上。
13.㈢升降装置驱动升降台到达预设高度位置,横移装置驱动平移台运动至初始位置,纵移装置驱动切割装置向前推进初段距离,切割装置的切割片开始对电池盖进行多次环绕切割,每完成电池盖一侧边的一侧切割后,纵移装置驱动切割装置进行一次初段距离的往返位置调节,转动装置驱动承载台进行相应角度的转动调节,同时横移装置对平移台的位置进行调节,将电池盖其它侧边的端侧位置与切割装置的切割片对齐。多次环绕切割过程中,纵移装置推进切割装置的切割深度逐次递增,设电池盖任一边对应的初段距离为sx,设每次环绕切割的深度递增参数为δx,则切割装置的切割片对电池盖该侧边逐次的切割深度依次为:[sx δx,sx 2δx,...,sx nδx]。
[0014]
㈣对电池盖每完成一次一圈环绕式切割后,提升机构驱动挂钩向上提升一次;
①
若提升机构内的传感模块传感检测到挂钩向上的拉力大于预设最大拉力值且挂钩未上升至高位行程位置,系统判定电池盖未切割完成,继续进行下一次切割深度递增的电池盖环绕切割;
②
若提升机构内的传感模块传感检测到挂钩向上的拉力不大于预设最大拉力值且挂钩上升至高位行程位置,系统判定电池盖切割完成。
[0015]
与现有的技术相比,本发明的有益效果是:本发明通过采用多次渐进环绕式切割方式,对难以拆除的锂电池电池盖进行切割拆除,通过多次切割深度逐步递增方式,在每次环绕式切割完成后利用提升机构进行电池
盖体的提升尝试,有效避免了对内部电池鼓包、未知主板位置等的直接破坏,既安全又能够提高废旧锂电池内部元件的可回收率。
附图说明
[0016]
图1为本发明的锂电池拆解装置的整体结构示意图。
[0017]
图2为本发明中升降装置、横移装置、纵移装置、切割装置的结构示意图。
[0018]
图3为本发明中升降装置、横移装置、纵移装置、切割装置的驱动配合示意图。
[0019]
图4为本发明中横移装置驱动连接平移台的(侧视)结构示意图。
[0020]
图5为本发明中电池盖外围切割装置的(另一种)位置分布示意图。
[0021]
附图标记说明:1-承载台;2-转动装置;3-边侧夹持机构,301-夹持推进板;4-电池盒;5-电池盖;6-盒盖提手;7-挂钩;8-提升机构;9-升降装置;10-横移装置;11-纵移装置;12-切割装置;13-升降轴杆;14-升降台;15-支撑导向杆;16-边侧导向板;17-平移台;18-横移导轮;19-纵移轴杆;20-导向滑板;21-导向槽;22-切割片;23-横移驱动轴;24-横移导向轴;25-联动固定架。
具体实施方式
[0022]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0023]
实施例一请参阅图1、图2、图3、图4,电池盒4放置在承载台1后,先通过边侧夹持机构3驱动夹持推进板301对电池盒4进行“正位”,边侧夹持机构3可以采用液压装置,若采用液压驱动方式,需要注意保证两个边侧夹持机构3的液压同步性,保证两侧液压驱动夹持推进板301的推动力、推进[最终]距离相同。
[0024]
承载台1下方的转动装置2,可以采用伺服电机,对承载台1进行转动,使得电池盖5对应的侧边正对切割装置12的切割片22。
[0025]
升降装置9可以固定安装在相应的基底架上,升降装置9配置用于传感检测升降轴杆升降距离的编码模块,根据需要预设的电池盒4、电池盖5参数,升降装置9向上推动升降台14到达指定的高度,并进行位置锁定。
[0026]
升降台14上侧固定安装横移装置10,横移装置10上侧面固定安装了多组横移导轮18,这样既能够便于平移台17的支撑和定向移动。横移装置10的一侧设置横移驱动轴23[动力轴],横移装置10另一侧设置横移导向轴24[保证平移台17的运动稳定性]。
[0027]
平移台17上侧固定安装有纵移装置11,平移台17上侧活动安装了切割装置12,切割装置12下侧安装了导向滑板20,平移台17上侧开设了导向槽21,导向滑板20的下侧可以嵌入安装导轮,这样能够减少切割装置12在平移台17上移动过程中的摩擦。
[0028]
实施例二在本发明中,初段距离的具体作用意义:切割装置12向前运动,保证切割装置12的切割片22与电池盖5外侧面接触;向后运动初段距离,切割片22不与转向时的电池盖5发生
接触。
[0029]
请参阅图1、图5,在对电池盖5的外围进行切割装置12的初始分布时,可以采用图1中的一组对侧边分布结构,也可以采用图5中相邻侧边分布结构。
[0030]
采用图1中切割装置12分布方式,每一次环绕式切割过程中,转动装置驱动承载台1转动90
°
,这两个纵移装置11推进切割装置12的初段距离都要设置两个参数数值,较小的初始距离参数数值对应电池盒4、电池盖5的窄侧边,较大的初始距离参数数值对应电池盒4、电池盖5的宽侧边。也就是完成一次环绕式切割,一个切割装置12要进行初段距离的不同值切换。
[0031]
采用图5中切割装置分布方式,每一次环绕式切割过程中,转动装置2驱动承载台转动180
°
,但这两个纵移装置11推进切割装置12的初段距离都只要设置一个参数数值[两个切割装置12的初段距离不同,一个对应电池盖5的窄侧边,一个对应电池盖5的宽侧边]。进行环绕式切割时,一个切割装置12对应完成自己位置的一个初段距离参数值运动即可。
[0032]
图5中的两个切割装置12相对位置为切割初始位置,两个切割装置12同时切割,互不干扰。
[0033]
实施例三请参阅图1、图2、图3,在本发明中,完成一次一圈切割后,提升机构8进行一次电池盖5提升尝试,若是提升力太大或是没能在设定的提升力条件下提升起电池盖5,则说明电池盖5的环侧还没切割完全,或没有把电池盖5内侧与电池盒4之间的强力密封胶层切割掉,有时切割掉内侧胶层,也无法提起电池盖5[电池盒4与胶层粘结固化,附着力较大],有时需要切割到电池盒4的壳体内侧壁面,才能将电池盖5提起,才能打开真正打开电池盖5。
[0034]
在本发明中,提升机构8向上提升挂钩过程中,挂钩7向上运动的高位行程位置,设定于能够将电池盖5与电池盒4分离的位置[电池盖5与电池盒4切割完成后]。例如挂钩7将盒盖提手6拉直后,挂钩的行程位置为h,则高位行程位置可以为h δm,δm可以根据实际场景需要进行设定。
[0035]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
