1.本发明涉及无轴承电机控制技术领域,主要涉及一种低成本、低中断周期的无轴承永磁薄片电机转子径向位移高精度辩识方法。
背景技术:
2.无轴承薄片电机没有转轴,定转子分离,轴向长度小,容易实现五自由度悬浮,在心脏泵等超洁净医疗领域有独特的应用。传统的无轴承控制需要位移传感器采样位移信号实现闭环,常用的位移传感器如电涡流传感器体积大、价格高昂、受环境影响大,不满足心脏泵小体积、稳定悬浮性能的要求。因此,需要寻求一种无位移算法取代位移传感器。
3.现有的识别方法中,磁链辨识法无法在零低速辨识磁链进而辨识位移;高频注入法信噪比过低,同时对基频影响大,无法满足位移辨识算法的要求;基于霍尔传感器的无位移算法信噪比大、位移计算精确,动态性能优秀,能够很好的取代位移传感器,实现位移闭环。但已有专利提出的相关算法使用的解调方法为正序解调法,由于其与霍尔信号相序不一致,解调后必须再经过旋转变换才能得到径向位移,使得程序繁琐冗余,增加了算法误差和计算时间,同时霍尔数量较多,增加了硬件成本。
技术实现要素:
4.发明目的:针对上述背景技术中存在的问题,本发明提供了一种低成本、低中断周期的无轴承永磁薄片电机转子径向位移高精度辩识方法,一方面提出负序解调法,精简核心算法,降低中断周期,提升了算法效率和精度,另一方面采用3个霍尔传感器辨识位移,相比于现有技术有效降低了硬件成本。
5.技术方案:为实现上述目的,本发明采用的技术方案为:
6.一种低成本、低中断周期的无轴承永磁薄片电机转子径向位移高精度辩识方法,所述无轴承永磁薄片电机采用六齿一对极的电机结构,包括6个l型定子;每个l型定子包括轴向的定子轭和径向定子齿,环绕在薄片状转子周围,径向定子齿与转子平齐,每个轴向定子轭分别绕有悬浮绕组和转矩绕组,所述转矩绕组为一对极,悬浮绕组为两对极,同时实现悬浮控制和旋转控制;所述l型定子底部通过铁心导磁环相连;所述薄片状转子外侧贴有一对极永磁体;所述永磁体磁场在空间上呈正弦分布;在径向定子槽口依次安装3个可编程霍尔传感器hall1—hall3,相邻霍尔传感器间的间隔角度均为120度;基于hall1—hall3的输出信号求解位移;具体地,
7.将转子机械固定于中心位置,旋转转子,获取hall1—hall3的输出信号,此时输出信号与位移变化无关;取三个霍尔信号幅值的平均值,即永磁磁链系数k4;三个霍尔信号分别减去基础永磁磁链部分,获得仅与位移变化有关的霍尔信号,然后进行简化处理,得到三个霍尔信号的有效分量;将简化后的霍尔信号乘以一倍频于转子频率的余弦负序分量,进行求和处理,获得转子径向位移x;将简化后的霍尔信号乘以一倍频于转子频率的正弦负序
分量,求和后取相反数,获得转子径向位移y。
8.进一步地,所述步骤s1中将转子外部均匀缠绕数层绝缘胶带,实现将转子固定在中心位置的目的;对于霍尔传感器hall1,输出信号与转子在沿hall1方向及垂直于hall1方向的位移、转子角度、永磁磁链有关;所述薄片转子没有硅钢片,电枢漏磁磁阻较大,故忽略漏磁,输出信号的表达形式如下:
9.hall1=k1*l*cos(θ
l-θ0)cos(ωt-θ0)
10.k2*l*sin(θ
l-θ0)sin(ωt-θ0) k4*cos(ωt-θ0)
11.其中θ
l
代表偏心的角度,l代表偏心的长度,ωt代表转子角度,θ0代表hall1所在的机械角度;k1是沿hall1方向的位移系数,k2是垂直于hall1方向的位移系数,k4是不偏心时的永磁磁链系数;
12.以hall1所在位置为起始点,取θ0=0,将测量得到的k4代入表达式并减掉这一项,则hall1中仅与位移有关的分量hall
1_eff
表达式如下:
13.hall
1_eff
=k1*l*cos(θ
l-θ0)cos(ωt-θ0) k2*l*sin(θ
l-θ0)sin(ωt-θ0)
14.由于相邻霍尔传感器间的间隔角度均为120度,分别将θ0 2pi/3、θ
0-2pi/3代入θ0,得到hall
2_eff
和hall
3_eff
:
15.hall
2_eff
=k1*l*cos(θ
l-θ
0-2pi/3)cos(ωt-θ
0-2pi/3)
16.k2*l*sin(θ
l-θ
0-2pi/3)sin(ωt-θ
0-2pi/3)
[0017][0018]
进一步地,将3个与位移有关的分量分别进行简化处理如下:
[0019][0020][0021][0022]
进一步地,将简化后的霍尔信号乘以一倍频于转子频率的余弦负序分量,进行求和处理,获得转子径向位移x,具体如下:
[0023][0024]
将简化后的霍尔信号乘以一倍频于转子频率的正弦负序分量,求和后取相反数,
获得与x比例相同的转子径向位移y,具体如下:
[0025][0026]
有益效果:
[0027]
(1)、本发明采用负序解耦法,算法精简,效率大幅提高。通过研究各霍尔信号表达式,发现霍尔信号中与位移有关的信号形式为位移在该霍尔方向(或垂直)的投影乘以与转子角度相关的余弦量。具体地,以hall
1_eff
为例,l*cos(θ
l-θ0)是位移在该霍尔方向的投影,l*sin(θ
l-θ0)是位移在垂直于霍尔方向的投影。cos(ωt-θ0)、sin(ωt-θ0)是与转子有关的正余弦量。
[0028]
本发明据此对三个霍尔信号进行简化,得到角度同相以及角度呈负序关系的三相余弦。现有技术中采用三相正序形式的乘信号,由于其与上述简化后的霍尔信号不一致,解调后必须再经过旋转变换才能得到径向位移。本发明提出负序解耦法,将用于解调的乘信号设置为与上述统一的三相负序分量形式,抵消了霍尔信号本身存在的转子角度、霍尔初始角度,只保留需要的转子偏心角度,因而可以直接得到径向位移x、y。本发明提出的技术在算法实现上只需要编写两行程序,不需要其他的旋转变换,大大精简了算法长度,提升了效率,同时本发明降低了原有算法的误差,提升了计算精度。
[0029]
(2)、本发明硬件上使用三个霍尔,成本降低。霍尔元件在实现位移辨识的同时还需要实现角度辨识。三个霍尔可以通过三二变换再反正切得到角度,这是准确计算角度的最优数量。基于此考虑,本发明提出三霍尔解算位移法。现有技术中提出的六霍尔解算位移算法,需要机械相对的两霍尔求和以抵消基础永磁磁链的影响,本发明提出转子中心离线测算法得出基础永磁磁链的幅值,根据理论推导的函数关系实时计算出基础永磁磁链分量,解除了霍尔信号中基础永磁磁链的耦合,因而在硬件上省去一半的霍尔传感器数量。
附图说明
[0030]
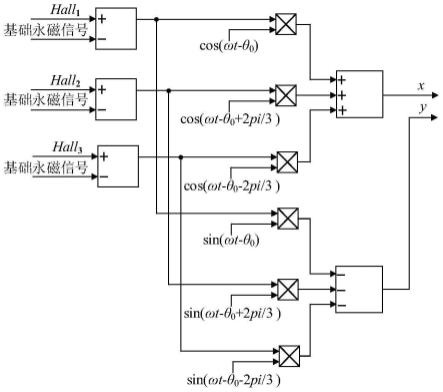
图1是本发明提供的电机转子径向位移辩识方法框图;
[0031]
图2是本发明采用的无轴承永磁薄片电机霍尔传感器机械位置示意图;
[0032]
图3是本发明提供的六齿一对极无轴承永磁薄片电机轴向剖面图;
[0033]
图4是本发明提供的无轴承永磁薄片电机转子偏心示意图;
[0034]
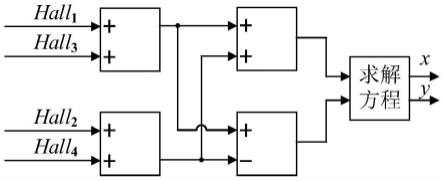
图5是现有技术中电机转子径向位移辩识算法框图;
[0035]
图6是本发明与现有技术的位移辨识结果对比图;
[0036]
图7是采用无位移算法的无轴承永磁薄片电机系统整体框图。
具体实施方式
[0037]
下面结合附图对本发明作更进一步的说明。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0038]
本发明采用的无轴承永磁薄片电机结构如图3所示,采用六齿一对极的电机结构,包括6个l型定子2。每个l型定子包括轴向的定子轭和径向定子齿,环绕在薄片状转子周围,
径向定子齿与转子平齐,每个轴向定子轭分别绕有悬浮绕组4和转矩绕组5,转矩绕组为一对极,悬浮绕组为两对极,同时实现悬浮控制和旋转控制。l型定子底部通过铁心导磁环3相连。薄片状转子1外侧贴有一对极永磁体,永磁体磁场在空间上呈正弦分布。
[0039]
本实施例采用在径向定子槽口依次安装3个可编程霍尔传感器hall1—hall3,相邻霍尔传感器间的间隔角度均为120度;基于hall1—hall3的输出信号求解位移。具体设置如图2所示。由于霍尔元件实现位移辨识的同时还需要实现角度辨识,三个霍尔可以通过三二变换再反正切得到角度,这是准确计算角度的最优数量。
[0040]
下面提供电机转子径向位移的具体辨识方法,算法框架如图1所示。
[0041]
首先通过实验测算出转子在中心位置旋转时霍尔传感器的信号,这部分信号与位移变化无关,具体测算方法为:将转子外部均匀缠绕数层绝缘胶带,直到转子能够被机械固定在中心位置,旋转转子,观察三个霍尔的输出,取三个霍尔信号幅值的平均值即为永磁磁链系数k4。
[0042]
对于霍尔传感器hall1,输出信号与转子在沿hall1方向及垂直于hall1方向的位移、转子角度、永磁磁链有关;薄片转子没有硅钢片,电枢漏磁磁阻较大,故忽略漏磁,输出信号的表达形式如下:
[0043]
hall1=k1*l*cos(θ
l-θ0)cos(ωt-θ0)
[0044]
k2*l*sin(θ
l-θ0)sin(ωt-θ0) k4*cos(ωt-θ0)
[0045]
其中如图4所示,θ
l
代表偏心的角度,l代表偏心的长度,ωt代表转子角度,θ0代表hall1所在的机械角度;k1是沿hall1方向的位移系数,k2是垂直于hall1方向的位移系数,k4是不偏心时的永磁磁链系数;
[0046]
以hall1所在位置为起始点,取θ0=0,将测量得到的k4代入表达式并减掉这一项,则hall1中仅与位移有关的分量hall
1_eff
表达式如下:
[0047]
hall
1_eff
=k1*l*cos(θ
l-θ0)cos(ωt-θ0) k2*l*sin(θ
l-θ0)sin(ωt-θ0)
[0048]
由于相邻霍尔传感器间的间隔角度均为120度,分别将θ0 2pi/3、θ
0-2pi/3代入θ0,得到hall
2_eff
和hall
3_eff
:
[0049]
hall
2_eff
=k1*l*cos(θ
l-θ
0-2pi/3)cos(ωt-θ
0-2pi/3)
[0050]
k2*l*sin(θ
l-θ
0-2pi/3)sin(ωt-θ
0-2pi/3)
[0051][0052]
将3个与位移有关的分量分别进行简化处理,通过积化和差公式进行处理,结果如下:
[0053]
[0054][0055][0056]
将简化后的霍尔信号乘以一倍频于转子频率的余弦负序分量,进行求和处理,获得转子径向位移x,具体如下:
[0057][0058]
将简化后的霍尔信号乘以一倍频于转子频率的正弦负序分量,求和后取相反数,获得与x比例相同的转子径向位移y,具体如下:
[0059][0060]
现有技术中基于正序解调法的位移辨识算法框图如图5所示,与图1相比,在前半部分多用了3个霍尔传感器,后半部分解调过程中则存在αβ-dq旋转变化部分,具体程序如下:
[0061]
x=l1*cos(2ωt-3θ0) l2*sin(2ωt-3θ0)
[0062]
y=-l1*sin(2ωt-3θ0) l2*cos(2ωt-3θ0)
[0063]
由于上述程序中运算量比较大的是4个三角函数,每个三角函数占据大约40个时钟周期,以控制器主频100mhz计算,总共花费将近2ns的时间。从误差角度看,转子角度的误差将会双倍叠加到计算结果中。
[0064]
因此,本发明提供的辨识方法,由于没有前后两部分,减少了霍尔传感器数量,降低了硬件成本,同时提升了算法的效率和精确度,降低了中断周期。
[0065]
此外,用matlab仿真得出现有技术中的位移辨识方法和本发明提供的方法的位移辨识效果图,如图6所示,两个方法辨识的位移都与给定位移重合度很高,验证了两种方法的有效性。但从放大的局部图来看,改进方法比原有方法更加贴合给定位移,即更加精确,验证了上述理论分析的正确性。
[0066]
图7为采用无位移算法的无轴承永磁薄片电机系统整体框图。其中,转矩控制部分为矢量控制,外环为速度环,用霍尔算出的转速作为反馈,内环为电流环。位移控制部分为外环位移环,用霍尔信号经过无位移算法得到的位移作为反馈,内环同样是电流环。
[0067]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。