1.本发明涉及滚动物体(带轮物体)运输的领域,特别是例如滚动床、病床的运输。
2.滚动的重负载的移动会给使用者带来困难,特别是如果重复这种动作的话,诸如会造成肌肉骨骼紊乱。技术领域
[0003][0004]
为了使滚动的重负载(例如其总质量接近或超过500kg的滚动床)的移动更容易且更符合人体工程学,已设想为这些重负载配备电机。例如,第一想法包括为每张病床配备用于驱动至少一个轮的电动系统,或为其添加机动轮。这种解决方案是昂贵的,因为它需要改变或改型所有的床,这是医院所负担不起的。此外,驱动系统和电池增加了床的重量。因此,当电池已耗尽时,移动床所需的力更大。
[0005]
类似地,在物流或贸易领域中,已经设想使所有手推车都是电动的。同样,这种解决方案也是昂贵的。
[0006]
一种替代方案是提供用于滚动物体的可移除的推进系统。已经考虑了多种技术方案。
[0007]
例如,专利申请wo 01/85,086描述了一种用于床的机动推进系统。推进系统构造为联接到床的一个或多个点。由于为该推进系统设置的联接装置,该系统是无法通用且无法适用于不同的滚动物体。实际上,它不能联接到未设有联接部分的滚动物体。此外,对于该推进系统,滚动物体的所有轮保持与地面接触。因此,联接的组件(推进系统和床)的定向更复杂、摩擦力高、且机动轮需要更多的动力。
[0008]
专利申请wo 2012/171079描述了用于病床的第二种推进系统。该推进系统构造为提升床的两个轮。然而,轮夹持机构复杂且体积庞大:横向尺寸(平行于机动轮的轴线的方向)大(大于床的轮的宽度),并且它可能超过床的横向尺寸,这可能不便于移动床,特别是在狭小的空间中,例如医院走廊或电梯中。
[0009]
专利申请wo 2013/156030描述了用于病床的第三种推进系统。该推进系统构造为提升床的两个轮。然而,系统具有大的横向(平行于机动轮的轴线的方向)和纵向(垂直于轮的轴线的方向)尺寸:后部平台从床突出,并且非机动轮之间的距离可能超过床的尺寸,这可能不便于移动床,特别是在狭小的空间中,例如医院走廊或电梯中。
[0010]
另一种可移除的电动推进系统是由申请人提交的专利申请的主题(fr 1873165)。该系统节省空间并且可以适应不同的滚动物体。它设有至少一个由电机驱动的轮。但是,该系统没有限定控制策略。可以改进该系统以便有效地控制电机。
[0011]
为了使这些推进系统的控制自动化,本发明涉及一种控制用于滚动物体的可移除电动推进系统的方法。该推进系统包括至少一个由电机驱动的轮。该控制方法包括以下步骤:
[0012]
a)在所述被驱动的轮处测量至少一个表示由滚动物体施加在推动系统上的扭矩
的信号;表示扭矩的信号可以是扭矩、力或伸长率;
[0013]
b)将所述测量的信号与至少一个第一阈值和至少一个第二阈值进行比较;第一阈值小于第二阈值;
[0014]
c)控制电机:
[0015]-如果对于第一持续时间(在第一持续时间内)测量值低于第一阈值,则由电机施加在非驱动轮上的扭矩设定点减小第一预定值;并且
[0016]-如果对于第二持续时间(在第二持续时间内)测量值高于第二阈值,则由电机施加在非驱动轮上的扭矩设定点增加第二预定值。
[0017]
因此,电机的控制允许使电机加速或减速,并因此使可移除电动推进系统自动适应使用者的需要。实际上,当使用者作用在电动推进系统上时,例如借助车把或直接通过作用在要移动的物体上,以便使电动推进系统加速或减速,这种手动动作被传递到非驱动轮,然后将修改其扭矩(如果使用者希望加速则扭矩增加;如果使用者希望减速则扭矩减小)。测量表示该扭矩的信号然后能够允许检测要求的变化。该控制方法使得能够调整电机的设定点以满足使用者的要求。如果使用者希望加速,电机的设定点将增加,并且在相反的情况下,如果使用者希望减速,则电机的设定点将降低。
技术实现要素:
[0018]
本发明涉及一种用于控制滚动物体的可移除(可移走/可移动)的电动推进系统的方法,所述推进系统包括至少一个由电机驱动的轮,该控制方法包括以下步骤:
[0019]
a)在所述非驱动轮处测量表示由滚动物体施加在推动系统上的扭矩的至少一个信号;
[0020]
b)将所述测量的信号与至少(一个)第一阈值和至少(一个)第二阈值进行比较,
[0021]
c)控制电机:
[0022]-如果对于第一持续时间测量值低于第一阈值,则由电机施加在非驱动轮(未被驱动的轮)上的扭矩的设定点减小第一预定值;并且
[0023]-如果对于第二持续时间测量值高于第二阈值,则由电机施加在非驱动轮上的扭矩的设定点增加第二预定值。
[0024]
根据本发明的方法的变型,如果在步骤c)中,测量值的范围在第一阈值和第二阈值之间,则保持由电机施加在非驱动轮上的扭矩的设定点。
[0025]
根据替代方案,如果在步骤c)中,测量值的范围在第一阈值和第二阈值之间,则由电机施加在非驱动轮上的扭矩的设定点减小预定义的增量,直到其停止。
[0026]
较佳地,在步骤c)中,使用连接到所述电机的能量耗散装置来减小设定点。
[0027]
有利地,第一阈值是负的,而第二阈值是正的。
[0028]
较佳地,第一持续时间等于第二持续时间。
[0029]
根据本发明的实施方式,第一预定值等于第二预定值。
[0030]
根据本发明的实施方式,第一预定值取决于测量的信号与第一阈值之间的差值。
[0031]
根据本发明的构造,第二预定值取决于测量的信号与第二阈值之间的差值。
[0032]
较佳地,如果对于第三持续时间(在第三持续时间内)测量值小于第三阈值,第三阈值小于第一阈值和/或第三持续时间小于第一持续时间,则将电机的设定点减小第三预
定值。
[0033]
较佳地,如果对于第四持续时间(在第四持续时间内)测量值大于第四阈值,第四阈值大于第二阈值和/或第四持续时间小于第二持续时间,则将电机的设定点修改第四预定值,第四预定值大于第二预定值。
[0034]
根据该实施例的变型,电机的设定点增加第四预定值。
[0035]
根据该实施例的另一替代方案,电机的设定点减少第四预定值以避免系统失控。
[0036]
根据有利的实施方式,较佳地当表示扭矩的信号的测量值的范围在第一阈值和第二阈值之间时,校正表示在所述非驱动轮处由滚动物体施加在推进系统上的扭矩的信号的测量值,然后将该校正的测量值与所述第一和第二阈值进行比较。
[0037]
本发明还涉及一种用于滚动物体的可移除(可移走/可移动)的电动推进系统,所述推进系统包括:底架,底架设有由电机驱动的至少一个轮;至少一个未被驱动的轮(底架设有由电机驱动的至少一个轮和至少一个未被驱动的轮);以及用于将所述推进系统联接到所述滚动物体的联接装置,所述联接装置包括用于抓持和提升所述滚动物体的至少一个轮的装置。推进系统包括用于测量表示在所述非驱动轮(未被驱动的轮)处由滚动物体施加在推进系统上的扭矩的信号的装置以及用于控制所述电机的装置,所述电机适合于实施上述控制方法。
[0038]
有利地,所述联接装置包括用于将所述滚动物体的至少一个轮定向在基本上垂直于所述推进系统的所述底架的纵向方向的方向上的装置。
[0039]
根据本发明的实施例,非驱动轮中的至少一个是偏心轮,该偏心轮可以围绕基本垂向的轴线定向(转向),并且推进系统包括用于控制所述电机的装置,以根据由测量装置获得的测量值来控制电机。
[0040]
本发明还涉及包括滚动物体和根据前述特征之一的电动推进系统的联接组件,所述滚动物体通过所述联接装置联接到所述电动推进系统。
[0041]
较佳地,所述滚动物体为滚动床、手推车、滚动家具或轮椅。
附图说明
[0042]
根据本发明的控制方法和系统的其它特征和优点将从参照附图、阅读以非限制性示例的方式给出的对各实施例的以下描述中变得明了,附图中:
[0043]
图1示出了根据本发明的控制方法的第一实施例。
[0044]
图2示出了根据本发明的控制方法的第二实施例。
[0045]
图3示出了根据本发明的控制方法的第三实施例。
[0046]
图4示出了根据本发明的控制方法的第一示例。
[0047]
图5示出了根据本发明的控制方法的第二示例。
[0048]
图6示出了根据图4的本发明的控制方法的第一变型的示例。
[0049]
图7示出了根据图4的本发明的控制方法的第二变型的示例。
[0050]
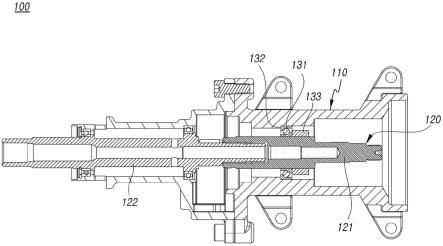
图8是根据本发明的推进系统在纵向方向上的整体剖视图。
[0051]
图9是根据本发明的推进系统的俯视图。
[0052]
图10是了根据本发明的系统的第一实施例在纵向方向上的剖视图。
[0053]
图11示出了根据本发明的系统在给定方向上的操作模式。
[0054]
图12示出了根据本发明的系统在与图11的方向相反的方向上的操作模式。
具体实施方式
[0055]
本发明涉及一种控制用于滚动物体的可移除(可移走/可移动)的电动推进系统的方法。实际上,可移除的电动推进系统允许辅助滚动物体的运输。滚动物体尤其可以是医院病床,其要运输的质量可以达到大约500kg。电动推进系统是可移除的并且它因此能够联接到滚动物体或从滚动物体脱开。因此,单一推进系统可用于在不同时间运输不同的滚动物体。因此,与永久安装在每个相关滚动物体上的特定电动系统相比,它需要的投资更少。
[0056]
可移除(可移走/可移动)的电动推进系统尤其具有至少一个由电机驱动的轮。该非驱动轮(未被驱动的轮)在移动滚动物体时提供帮助,因此允许例如医院病床的抬担架者的使用者体力上更轻松地移动滚动物体。
[0057]
在该控制过程中,执行以下步骤:
[0058]-在非驱动轮处测量表示由滚动物体施加在推动系统上的扭矩的至少一个信号。为此,可以使用集成在电动推进系统中的测量装置。该测量提供了有关非驱动轮(未被驱动的轮)的扭矩变化的信息。从电机施加到轮上的扭矩是已知的(通过施加到电机的设定点),扭矩变化将被解释为由于使用者或者由轮/地面接触(斜坡、孔、门槛等)引起的变化。使用者可以例如作用在滚动物体或作用在推进系统上,例如借助车把。
[0059]-将测量的信号与至少(一个)第一阈值和至少(一个)第二阈值进行比较。第一阈值低于第二阈值。这种比较可以例如借助能够与测量装置通信的计算机、计算(机)装置或电子系统来执行。第一阈值和第二阈值可以例如通过使系统经受实际生活测试(真实测试)来预先限定。
[0060]-如下控制非驱动轮(未被驱动的轮)的电机:
[0061]
*如果对于第一持续时间测量值小于第一阈值,第一阈值和第一持续时间是预先限定的,则由电机施加在非驱动轮上的扭矩设定点减小第一预定值,这导致电机和系统变慢;并且
[0062]
*如果对于第二持续时间测量值大于第二阈值,第二阈值和第二持续时间是预先限定的,则由电机施加在非驱动轮上的扭矩的设定点增加第二预定值,因此,导致电机和系统加速。
[0063]
较佳地,第一阈值和第二阈值不同。
[0064]
在某个持续时间内低于(相应地高于)阈值(例如,第一阈值、相应地第二阈值)的测量值应理解为意指获得的测量值在整个考虑的持续时间(例如,第一持续时间、相应地第二持续时间)内保持低于(相应地高于)所考虑的阈值(例如,第一阈值、相应地第二阈值)。在每个测量时间增量中,测量值必须保持低于(相应地高于)所考虑的阈值,所考虑的阈值是针对所考虑的测量值低于(相应地高于)阈值。
[0065]
因此,电机的设定点递增变化。在第一增量期间,将所考虑的信号的测量值与两个阈值(第一和第二阈值)进行比较。在时间增量(第一持续时间、相应地第二持续时间)期间,如果测量值低于(相应地高于)第一阈值(相应地第二阈值),则电机的设定点将针对下一时间增量进行修改,以更快地调节测量值,即更快地满足使用者的需求。
[0066]
此外,由于预先限定的持续时间的定义,诸如越过门槛或地面中的孔引起的颠簸
不需要对设定点进行不需要的改变,超过阈值的持续时间非常短,小于第一和/或第二持续时间。另一方面,通过使用者分别向前或向后施加大于第二或第一持续时间的持续时间的力以分别加速或制动,系统修改电机的设定点以使其加速或减速。因此,系统通过施加短负载来自动调节使用者的需求,在本发明的上下文中,术语“短负载(或脉冲)”被理解为,保持大于第一或第二持续时间的持续时间的力,以允许系统的反应。使用者随后可以放松所施加的力,该力此后不需要保持。
[0067]
该方法还特别有利,因为使用者不需要用于控制系统的远程控制器或控制箱。相反,使用者手动操作滚动物体,并且系统对使用者施加的动作做出直观而自动的响应。
[0068]
有利地,如果在控制电机的步骤期间,测量值的范围在第一阈值和第二阈值之间,则可以保持通过电机施加在非驱动轮上的扭矩设定点。范围在第一阈值和第二阈值之间的测量值应理解为既不在第一持续时间内低于第一阈值,也不在第二持续时间内高于第二阈值。电机的设定点不被修改。滚动物体的运动因此可以继续,而不需要任何使用者的努力。电池或任何其它能量存储装置可用于为电机提供动力。
[0069]
作为非限制性示例,图1示意性地示出了根据本发明的用于可移除电动推进系统的控制方法的示例。在该控制方法中,测量表示施加在可移除电动推进系统的非驱动轮(未被驱动的轮)上的扭矩的信号(mes)。非驱动轮处的扭矩由执行的测量确定,并且将其与电机的设定点进行比较。这允许确定动作是否由使用者执行,以加快或减慢系统。
[0070]
然后对于第一持续时间将所进行的测量与至少(一个)第一阈值进行比较(comp),并且对于第二持续时间将其与至少(一个)第二阈值进行比较。这两个阈值是根据滚动物体、操作情况和/或使用者预先限定的,例如借助在系统上执行的实验。在第一持续时间(相应地第二持续时间)低于(相应地高于)第一阈值(相应地第二阈值)的测量值应理解为意指在所考虑的整个持续时间测量值低于(相应地高于)所考虑的阈值。因此,如果对于第一持续时间(相应地第二持续时间)执行的测量值的一部分大于第一阈值(相应地小于第二阈值),则对于第一持续时间不认为测量值小于第一阈值(对于第二持续时间相应地大于第二阈值)。
[0071]
如果对于第一持续时间测量值低于第一阈值(条件c1t),则降低电机的扭矩设定点(c-),以减慢电机(并因此减慢可移除电动推进系统)。
[0072]
如果对于第二持续时间测量值大于第二阈值(条件c2t),则增加电机的扭矩设定点(c ),以加速电机(并因此加速可移除电动推进系统)。
[0073]
在任何其它情况下,即当在所考虑的持续时间内进行的测量(值)的至少部分的范围在第一阈值和第二阈值之间时(条件c3),测量值的范围被认为是在第一阈值和第二阈值之间,并且对于电机保持先前的设定点(设定点0)。应当注意,电机的控制以增量时间间隔执行,其对应于与第一持续时间(对于第一阈值)和第二持续时间(对于第二阈值)对应的持续时间的时间增量。在控制过程开始之前,为了其初始化,电机的设定点被认为为零(无设定点)。设定点适用于测量增量之后的增量。
[0074]
替代地,如果在控制电机的步骤期间,测量值的范围在第一阈值和第二阈值之间,则由电机施加在非驱动轮上的扭矩设定点可以通过预先限定(预定义)的增量逐渐减小,直到电机停止。该选项具有的优点是使系统在一定时间后停止,这限制了如果使用者未能使系统停止/减速而发生碰撞的风险。此外,该方案接近系统的自然操作(自然操作理解为无
电辅助操作),从而使得使用者逐渐习惯于电辅助系统。在自然操作期间,由于通过使用者在系统上施加力,系统被设置为移动,但趋于自行停止。在逐渐降低扭矩设定点时,系统会做出反应,就像是摩擦力趋于使它停止一样。
[0075]
作为非限制性实施例,图2示意性地示出了适用于根据本发明的系统的控制方法的另一个示例。在该控制方法中,测量表示施加在可移除电动推进系统的非驱动轮处的扭矩的信号(mes)。
[0076]
然后对于第一持续时间将所进行的测量与至少(一个)第一阈值进行比较(comp),并且对于第二持续时间将其与第二阈值进行比较。这两个持续时间(这两个阈值)是根据滚动物体、操作情况和/或使用者预先限定的。
[0077]
如果对于第一持续时间测量值低于第一阈值(条件c1t),即,如果在第一持续时间的时间间隔内执行的所有测量点都低于第一阈值,则电机的扭矩设定点降低(c-),以减慢电机(并因此减慢可移除电动推进系统)。
[0078]
如果对于第二持续时间测量值大于第二阈值(条件c2t),即,如果在第二持续时间的时间间隔中执行的所有测量点都大于第二阈值,则电机的扭矩设定点增加(c ),以便加速电机(并因此加速可移除电动推进系统)。
[0079]
在其它情况下,即当测量值的范围在第一阈值和第二阈值之间时(条件c3),即测量值既不在第一持续时间内低于第一阈值,也不在第二持续时间内大于第二阈值,则电机的先前设定点(设定点cr)以预先限定的增量减小。因此,设定点增量可以是恒定的,或者相反,限定为逐渐增强减速,直到电机停止。因此,在使用者没有作用在系统上以控制加速或减速的每个时间增量上,系统逐渐减速直到它停止。
[0080]
这种用于使系统减速的渐进式能量耗散尤其可以通过使用连接到电机的能量耗散装置(例如机械制动器、电阻元件,和/或将电机用作为给电池充电的发电机)来实现。
[0081]
有利地,第一阈值可以是负的,而第二阈值可以是正的。因此,当测量值超过第二阈值时,增加电机的设定点;相反,当测量值低于第一阈值时,降低电机的设定点,直到电机完全停止。此外,简化了系统控制。
[0082]
此外,第一阈值可以与第二阈值相反。因此,系统具有对称的加速和制动行为(特性)。
[0083]
根据本发明的方法的变型,第一持续时间可以等于第二持续时间。这允许减少系统参数的数量。此外,这使得使用者能更好地预测系统的行为(例如,以便确定系统做出反应所需的负载保持时间)。该变型是有利的,因为它还允许通过以相同的时间间隔对第一阈值和第二阈值进行比较来简化控制方法。
[0084]
根据本发明的实施例,第一预定值可以等于第二预定值。因此,加速和减速阶段是对称的,这使得使用者能够更好地预测系统的行为(特性)。
[0085]
有利地,第一预定值可以取决于测量信号和第一阈值之间的差值。换言之,第一预定值可以不是预定常数而是预先限定(预定义)的函数。因此,如果测量的信号(例如在第一持续时间内所测量的信号的平均值)与第一阈值之间的差值增加,则设定点将增加,例如线性地增加。然而,也可以使用其它曲线。这允许更快速且更有效地满足使用者的需求。
[0086]
有利地,第二预定值可以取决于测量信号和第二阈值之间的差值。换言之,第二预定值可以不是预定常数而是预先限定(预定义)的函数。因此,如果测量的信号(例如在第二
持续时间内所测量的信号的平均值)与第二阈值之间的差值增加,则设定点将增加,例如线性地增加。然而,也可以使用其它曲线。这允许更快速且更有效地满足使用者的需求。
[0087]
根据本发明的方法的实施方式,如果测量值在第三持续时间内小于第三阈值,第三阈值小于第一阈值,则可以通过第三预定值来修改电机的设定点。.第三预定值可以例如大于第一预定值。因此,如果需要制动,例如通过地面上的小孔,或如果系统经受上坡,系统可以增加设定点以防止系统停止。
[0088]
在一些情况下,第三持续时间可以小于第一持续时间。这可以允许检测偶尔的制动峰值。
[0089]
根据该实施方式的较佳变型,机器的设定点可以设置为零,以便执行紧急停止。
[0090]
根据控制方法的一实施例,如果测量值在第四持续时间内大于第四阈值,第四阈值大于第二阈值,则电机的设定点可以修改了第四预定值,第四预定值较佳地大于第二预定值。
[0091]
根据该方法的实施方式,电机的设定点可以增加第四预定值。因此,如果系统检测到需要动力,系统可以自动增加设定点,以更快速且更有效地满足使用者的需求。
[0092]
根据该方法的另一种实施方式,电机的设定点可以减少第四预定值,以避免系统失控。因此,可以防止超过第四阈值的系统的失控。
[0093]
根据替代方案,第四阈值可用于根据各种测量参数增加或减少电机的设定点,以确定超过阈值是由于偶尔的动力峰值还是由于失控的风险。
[0094]
根据变型,第四持续时间可以小于第二持续时间。这可以允许检测偶尔的动力峰值。
[0095]
较佳地,在将该校正的测量值与各种阈值(当使用时,第一、第二和可能的第三和/或第四阈值)比较之前,例如当表示扭矩的信号的测量值的范围在第一阈值和第二阈值之间时,表示在非驱动轮处由推进系统施加在滚动物体上的扭矩的信号的测量值可以被校正。例如,该校正可以使测量值归零。
[0096]
该校正尤其可以允许克服可能在系统中产生的差异并因此执行自动再校准。
[0097]
在下坡时,该校正还能够防止系统的失控。实际上,当系统在第一阈值和第二阈值之间保持指定的时间段时,可以进行校正以使测量值归零。由于测量值归零,电机的设定点保持恒定。这种校正允许避免超越第二阈值。实际上,在没有测量值校正的情况下,如果系统继续沿斜坡下降,则可能发生第二阈值的超越,这将导致增加电机的设定点并因此导致在不期望时使系统加速。
[0098]
类似地,该校正也可用于避免系统在上坡时停止。事实上,当系统在第一阈值和第二阈值之间保持指定的时间段时,可以进行校正以使测量值归零,从而执行再校准。由于测量值归零,电机的设定点保持恒定。该校正允许避免了降低到第一阈值以下。实际上,在没有测量值校正的情况下,如果系统继续沿斜坡上升,该值可能降低到第一阈值以下,这将导致降低电机的设定点并因此导致使系统停止,这是不期望的。
[0099]
作为非限制性实施例,图3示意性地示出了适用于根据本发明的系统的控制方法的另一个示例。在该控制方法中,测量表示施加在可移除电动推进系统的非驱动轮处的扭矩的信号(mes)。
[0100]
随后对于第一持续时间将所进行的测量(值)与至少一个第一阈值进行比较
(comp),并且对于第二持续时间将其与至少一个第二阈值进行比较。这两个阈值是根据滚动物体、操作情况和/或使用者预先限定的。如果对于第一持续时间(相应地第二持续时间)执行的测量值的一部分大于第一阈值(相应地小于第二阈值),则对于第一持续时间不认为测量值小于第一阈值(对于第二持续时间相应地大于第二阈值)。在该方法中,测量值与第一阈值和第二阈值进行比较的测量增量相同。这意味着第一持续时间等于第二持续时间。
[0101]
如果对于第一持续时间测量值低于第一阈值(条件c1t),则降低电机的扭矩设定点(c-),以减慢电机(并因此减慢可移除电动推进系统)。
[0102]
如果对于第三持续时间测量值低于第三阈值(条件c1t2),则降低电机的扭矩设定点(c
‑‑
),第三阈值低于第一阈值,设定点c
‑‑
的降低大于设定点c-的降低,以便加大电机(并因此减慢可移除电动推进系统)的减速。
[0103]
如果对于第二持续时间测量值大于第二阈值(条件c2t),则增加电机的扭矩设定点(c ),以加速电机(并因此加速可移除电动推进系统)。
[0104]
如果对于第四持续时间测量值大于第四阈值(条件c2t),第四阈值大于第二阈值,则电机的扭矩设定点(c )增加,该设定点的增加大于设定点c 的增加,以便加速电机(并因此加速可移除电动推进系统)。
[0105]
在任何其它情况下,即当在所考虑的持续时间内进行的测量的至少一部分的范围在第一阈值和第二阈值之间时(条件c3),对于电机保持先前的设定点(设定点0)。因此在这种情况下不修改先前的设定点。
[0106]
本发明还涉及用于滚动物体的可移除的电动推进系统。该系统包括底架,底架设有至少一个由电机驱动的轮,还包括至少一个非驱动轮、车把和用于将推进系统连接到滚动物体的联接装置(该系统包括底架,底架设有至少一个由电机驱动的轮、至少一个非驱动轮,还包括车把和用于将推进系统连接到滚动物体的联接装置)。此外,联接装置包括用于抓持和提升滚动物体的至少一个轮的装置。该推进系统包括用于测量表示在非驱动轮处由滚动物体施加在推进系统上的扭矩的信号的装置。推进系统尤其包括用于控制适合于实施上述控制方法的电机的装置。因此,系统可以对于使用者(驱动者)的要求自动作出反应,以调整可移除电动推进系统(和滚动物体)的行进速度。联接装置将可移除电动推进系统的运动传递到滚动物体。有利地,可移除电动推进系统还可以包括测量装置,比如能够测量表示非驱动轮处的扭矩的大小的传感器。这些传感器尤其可以是扭矩、力或伸长(量/率)或转速传感器。
[0107]
有利地,根据本发明的方法和系统可以在系统内使用单个传感器。因此简化了系统和方法。
[0108]
根据本发明的系统的较佳实施方式,联接装置可以包括用于将滚动物体的至少一个轮定向在基本上垂直于推进系统底架的纵向方向的方向上的装置。因此,可以阻止(止动)滚动物体相对于电动推进系统的相对运动。此外,该特征是有利的,因为它允许适应不同的滚动物体。
[0109]
有利地,非驱动轮中的至少一个可以是偏心轮,其可以围绕基本垂向的轴线定向。该具体特征允许系统通过轮相对于用作连接到底架的枢轴的垂向轴的偏心度来自动定向,而无需受控的定向装置。因此,当使用者借助车把或滚动物体起作用以改变行进方向时,系统会将自身定向在期望的方向上。因此,该控制方法只需要控制系统的速度,不需要主动控
制方向,系统能够被动控制方向,这简化了控制系统和方法。
[0110]
此外,推进系统可以包括电机控制装置,用于根据通过测量装置获得的测量值来控制电机。控制装置尤其可以包括控制器。控制装置适于实现上述方法。因此,控制是根据简短的使用者请求自动进行的。
[0111]
作为非限制性示例,图8示意性示出根据本发明的电动推进系统。图8是可移除电动推进系统1的侧剖视图。可移除电动推进系统1包括底架2。轴线x对应于底架2的纵向轴线和推进系统的主要位移方向,而轴线z对应于底架2的垂向轴线。底架支撑三个轮。底架2支撑轮3,它是由电机10借助传动件17、例如皮带或链条等驱动的轮(替代地,电机10可以直接连接到轮3)。轮3可以相对于底架2围绕被称为枢轴连接件的垂向轴线8定向。较佳地,定向是自动的并且不需要任何受控的定向装置。换言之,该系统不具有主动定向装置。电机10可以与机动轮3的枢轴连接件8成一体。在另一端部处,底架2支撑两个轮4,它们不由电机驱动。轮4可以相对于底架围绕垂向轴线9定向。每个被驱动或未被驱动(非驱动)的轮因此可围绕垂向轴线定向。电动推进系统1还包括联接装置5。根据所示实施例,电动推进系统1包括两个联接装置5,它们位于底架沿横向方向(未示出的轴线y)的两侧上,从而借助滚动物体的两个轮(未示出)提供联接。联接装置5以简化的方式示出为夹紧件。联接装置5的垂向移动由双箭头示出:联接装置的这种垂向移动可以是夹持和提升滚动物体的轮的装置。联接装置5沿x方向布置在机动轮3与非机动轮4之间。此外,电动推进系统1包括车把6,其例如呈杆的形式,该杆装备有把手(未示出),该把手借助具有水平轴线的接头12相对于底架2沿底架2的横向方向(垂直于图面)铰接。可以使用其它使用模式:例如,车把可以连接到枢轴连接件8。此外,电动推进系统1包括电池11。电池11靠近电机10和机动轮3布置在底架2上,并且它将电力供应到电机。
[0112]
电池11可以是可移除的。因此,它可以很容易地被充电电池移除和更换,而不会由于电池在充电而浪费时间。它也可以是机架安装的,即,例如可滑动地接合在设置在隔间中的框架或平台(称为机架,其对应于用于安装电子设备模块的外壳)中,在该隔间中电气连接件可以预先接线。通过机架安装,连接在设备安装时是自动的。因此,将电池安装在机架(或将其卸下)是快速且简单的。
[0113]
作为非限制性示例,图9示意性示出根据本发明的一实施例的电联接到滚动物体13的电动推进系统。图9是滚动物体13和电动推进系统1的俯视图。滚动物体13可以是任意类型的,特别是滚动床。滚动物体包括两个轮14,其随意地被称为后轮;以及两个轮15,其随意地被称为前轮。电动推进系统1包括底架2。轴线x对应于底架2的纵向轴线和推进系统的主要行进方向,而轴线y对应于底架2的横向轴线,并且垂向轴线z未示出。底架2支撑三个轮。底架2支撑轮3,该轮是由电机(未示出)驱动的轮。轮3可以相对于底架2围绕垂向轴线8(枢轴连接件)定向。在另一端部处,底架2支撑两个轮4,它们不由电机驱动。轮4可以相对于底架围绕垂向轴线9定向。电动推进系统1还包括联接装置5。根据所示实施例,电动推进系统1包括两个联接装置5,它们沿基本横向方向(轴线y)位于底架的两侧上,从而借助滚动物体的两个后轮14提供联接。联接装置5以简化的方式示出为夹紧件。滚动物体的后轮14布置在夹紧件中,并且它们基本沿轴线y布置,即沿垂直于底架2的纵向轴线(轴线x)定向,以便防止在滚动物体和电动推进系统的纵向方向上的相对运动。此外,滚动物体的前轮15是自由的,并且没有联接。电动推进系统1还包括车把6,其例如呈杆的形式,该杆装备有相对于
底架2铰接的把手(未示出)。此外,电动推进系统1包括支撑平台7(用于例如使用者在电动滑板车模式下使用电动推进系统)。平台7布置在底架2的支撑非机动轮4的端部处。联接装置5、非机动轮4、平台7和底架2的主要部分布置在滚动物体下方。沿底架2的纵向方向x,只有机动轮3和车把6能从滚动物体13突出。
[0114]
作为非限制性示例,图10示意性示出了沿本发明实施例的横轴的剖视图。
[0115]
图10示出了由电机10驱动的轮3。非驱动轮3通过枢轴连接件连接到其轴线8基本垂向的底架。因此,轮可以被定向成赋予电动推进系统和滚动物体的行进方向。非驱动轮3和底架2之间的枢轴连接件的轴8刚性地固定到支撑件20。支撑件20自身设置有围绕非驱动轮3的轴21的枢轴连接件。在图10的剖切平面中,非驱动轮3的轴21距枢轴连接件的轴8的距离为e。因此,非驱动轮3相对于枢轴连接件的轴8偏移(换言之,它从枢轴连接件的轴8偏心)。因此,非驱动轮3是可定向的偏心轮,其定向是自动的。因此,它是在行进方向上自动定向的被动系统。
[0116]
电机10连接到非驱动轮3。在该图中,电机10的轴22与非驱动轮3的轴21不同轴。包括皮带或链条的传动装置17用于电机10与非驱动轮3之间的连接和动力传动。电机10紧固到作为支撑板的连接件23上。连接件件23设有围绕非驱动轮3的轴21的枢轴连接件。因此,连接件23和支撑件20可以围绕非驱动轮3的轴21相对于彼此枢转。测量装置24可以定位在这两部件之间,该测量装置24一方面被固定到支撑件20并且另一方面被固定到连接件23,以测量在这两个部件之间产生的距离、角度、力或扭矩的变化。该测量装置24尤其可以是扭矩杆,其可以测量在非驱动轮3上产生的扭矩变化并且阻挡连接件23的旋转。该测量允许确定非驱动轮3处的扭矩。扭矩值然后用作用于通过控制装置(未示出)控制电机的数据,控制装置例如是包括电子控制设备的控制器。
[0117]
图11和12示出了对应于图10的可移除电动推进系统的操作模式。
[0118]
在图11中,使用者借助力f1作用在车把或滚动物体上,力f1传递到底架2,然后传递到支撑件20,并最终传递到非驱动轮3。力f1与被视为前进方向的方向x共线。该力在非驱动轮3和地面(未示出)之间的接触部处产生反作用力-f1。由力f1生成的扭矩cr1在非驱动轮3处产生。在非驱动轮3上产生的该扭矩cr1产生非驱动轮的旋转,其部分地被电动马达的阻力扭矩抵消,并且产生连接件23绕非驱动轮3的轴的旋转,从而产生连接件23向下(在与z相反的方向上)的运动。因此,测量装置然后可以检测到支撑件20和连接件23之间的伸长量d1或角度或力的增加。测量装置24可以例如包括扭矩杆。控制装置然后可以控制电机以增加产生的扭矩(或旋转速度)。因此,系统能够加速,并且然后可以保持速度,而使用者并不费任何力。由使用者产生的简单脉冲足以获得加速度。此外,由于非驱动轮在行进方向上自动定向,因此由测量装置执行的测量总是在行进方向上进行,这尤其允许克服其它方向上的寄生力。
[0119]
在图12中,使用者借助力f2作用在车把或滚动物体上,力f2传递到底架2,然后传递到支撑件20,并最终传递到非驱动轮3。力f2的方向与图11的力f1的方向x相反;力f2在向后方向上。该力在非驱动轮3和地面(未示出)之间的接触部处产生反作用力-f2。由力f2生成的扭矩cr2在非驱动轮3处产生。在非驱动轮3上产生的该扭矩cr2产生连接件23围绕非驱动轮3的轴的旋转,这产生连接件23的向上(在方向z上)移动。因此,测量装置然后可以检测到支撑件20和连接件23之间的长度或角度或力的减小d2。控制装置然后可以控制电机以减
小产生的扭矩(或旋转速度)。因此,系统将借助使用者向后的简单脉冲来减慢或降低行进速度。然后,该系统允许保持这种降低的速度,而使用者不费任何力。
[0120]
图11和12描述了系统在对应于底架的纵向方向的方向x上的操作原理,但由于轮相对于轮和底架之间的枢轴连接件的偏心,轮在行进方向上可自动地取向,图11和12中示出的操作效果可以应用于任何期望的行进方向。
[0121]
本发明也涉及一种由滚动物体和如上所述的电动推进系统构成的联接的组件,滚动物体通过联接装置联接到电动推进系统。因此,滚动物体能够以简单的方式移动,与使用者的交互有限。它不需要远程控制并且以近乎直观的方式对使用者请求做出反应。
[0122]
有利地,滚动物体是滚动床、手推车、滚动家具或轮椅。因此,这些沉重而笨重的负载能够很容易地移动,同时限制了使用者患肌肉骨骼紊乱的风险。此外,由于电动推进系统尺寸减小,由此实现的所联接的组件的尺寸也减小,这允许它即便在狭小空间内也能被操纵。
[0123]
示例
[0124]
图4至图7示出了根据本发明的用于滚动物体的可移除电动推进系统的控制方法的示例。
[0125]
图4对应于图1的实施例。图4示出表示非驱动轮处的扭矩的信号的测量曲线cm,该信号由可移除电动推进系统的测量装置(例如扭矩传感器)随时间t测量。在每个时间增量上,增量由虚线的两条相继的垂向线(垂直于时间轴t)界定,在每个考虑的增量上,将测量值与分别对应于第一个阈值(s-)和第二阈值(s )的阈值s-和s 进行比较。对于被认为低于阈值的测量值,例如小于第一阈值s-,测量值必须在所考虑的增量的持续时间内低于阈值。类似地,测量值将被视为大于阈值,例如大于第二阈值s ,如果测量值在(整个)增量的持续时间内大于阈值s ,则增量对应于两个相继的垂向虚线之间的间隔,比较的增量在此对于测量值cm与第一阈值s-和第二阈值s 的比较是相同的。换言之,将测量值与第一和第二阈值(s-和s )进行比较的第一持续时间和第二持续时间相同,这简化了分析。
[0126]
在信号为零的初始时刻(非驱动轮处没有扭矩)和t1之间,观察到曲线cm的信号增加,这意味着系统中开始了运动。然而,在整个第一持续时间,第一增量在时间t1处停止,测量曲线cm保持在s-和s 之间,电机的设定点csg被保持。因为这是电机的开始,所以电机最初处于停止,初始设定点csg为零。因此,电机的设定点csg现在在表示下一个增量的时间t1和时间t2之间为零。
[0127]
在时间t2和时间t3之间的增量期间,测量值的部分100大于阈值s 。然而,测量值的部分101低于阈值s 。因此,在时间t2和时间t3之间的时间增量中,不能认为测量cm大于阈值s 。因此,设定点csg对于时间t3和时间t4之间的下一个增量保持与前一个设定点csg相同,其对应于在时间t2和时间t3之间应用的设定点csg。
[0128]
在时间t3和时间t4之间的下一个增量上,整个测量曲线102大于阈值s ,因此电机的设定点csg在从时间t4开始的下一个增量中增加,这由在设定点曲线csg上观察到的第一步长(cr
é
neau)实现。
[0129]
在时间t4和t10之间,测量值cm始终保持大于阈值s ,使得设定点csg增加对应于各种增量的步长。应当注意,每个步长具有相同的路径。换言之,设定点增加了预定的常数值。
[0130]
在时间t10和t11之间,曲线的部分103实际上在阈值s 以上,但曲线的另一部分104在阈值s 以下。因此,不能认为测量值在位于t10和t11之间的增量持续时间内大于阈值。因此,先前的设定点,即在时间t10之后定义并在t10和t11之间应用的设定点对于时间t11开始的增量被保持。
[0131]
在时间t11和时间t16之间,曲线的部分105在s-和s 之间,因此保持扭矩设定点csg直到t17。
[0132]
在时间t16和时间t17之间,曲线的部分107低于阈值s-,但曲线的另一部分106高于阈值s-。因此,不能认为曲线cm在t16和t17之间的增量中低于阈值s-。因此,在时间t16和时间t17之间应用的先前设定点在t17和t18之间保持。
[0133]
在时间t17和时间t18之间,曲线的部分108低于阈值s-,但曲线的部分109高于阈值s-。因此,不能认为曲线cm在t17和t18之间的增量中低于阈值s-。因此,先前的设定点对于位于t18和t19之间的下一增量被保持。
[0134]
在时间t18和时间t20之间,曲线cm保持位于s-和s 之间,使得在t19和t20之间或者在t20和t21之间不修改设定点。
[0135]
在时间t20和时间t21之间,曲线的部分111实际上低于阈值s-,但曲线的另一部分110高于阈值s-。因此,不能认为测量值在t20和t21之间的增量持续时间内低于阈值s-。因此,应用于位于时间t20和时间t21之间的先前增量的设定点在从时间t21开始的增量中被保持。
[0136]
在时间t21和时间t26之间,曲线的部分112保持低于阈值s-。因此,在所考虑的各种增量上,设定点按步长逐渐减小。每个步长的路径是相同的。设定点降低由预先限定(预定义)的恒定值确定。
[0137]
在时间t26和时间t27之间,曲线的部分113低于阈值s-,但曲线的另一部分114高于阈值s-。因此,不能认为测量值在位于t26和t27之间的增量持续时间内低于阈值s-。因此,应用于位于时间t26和时间t27之间的先前增量的设定点在时间t27和时间t28之间被保持。
[0138]
在时间t27和时间t28之间,曲线的部分116高于阈值s-,但曲线的另一部分115低于阈值s 。因此,不能认为测量值在位于t27和t28之间的增量持续时间内高于阈值s 。因此,应用到先前增量的设定点在时间t28和时间t29之间保持。
[0139]
在时间t28和时间t29之间,曲线的部分117高于阈值s ,但曲线的另一部分118低于阈值s 。因此,不能认为测量值在位于t28和t29之间的增量持续时间内高于阈值s 。因此,应用到先前增量的设定点对于在t29开始的增量被保持。
[0140]
曲线的最后部分在第一阈值s-和第二阈值s 之间。因此,扭矩设定点csg保持恒定直到结束。
[0141]
应当注意,对于该实施例示例,电机的辅助在时间t4和t33之间提供给系统,其中设定点针对测量值调整,以满足使用者的需要。
[0142]
作为非限制性示例,图5示意地示出本发明的控制方法的第二示例。对应于图4中的附图标记的附图标记是相同的,因此下文不再详述。它们对应于相同的元件。图5对应于图2的实施例。
[0143]
图5与图4的不同之处在于在时间t11和t22之间应用了设定点csg控制策略的变
型,其对应于在时间t11开始的增量结束,然后在t27之间,直到设定点csg的曲线的结束。事实上,在图4中,由于位于t10和t21之间的每个增量的测量值对应于第一阈值s-和第二阈值s 之间的测量值,因此电机的设定点csg在t11和t22之间保持恒定。另一方面,在图5中,在t11和t22之间的同一时间段内,电机的设定点csg以步长150逐渐减小,减小量对应于恒定步长。因此,在t11和t22之间,设定点降低步长150csg是相同的。
[0144]
类似地,在t27之后的时间段上,电机的设定点csg逐渐减小直到它停止,而在图4中,该设定点csg保持恒定。实际上,在时间t26和时间t27之间,测量值被认为处于第一阈值s-和第二阈值s 之间,在时间t26和时间t27之间应用的设定点在时间t27和时间t28之间减少了步长150。类似地,设定点在时间t28和t29之间减小,在此它达到零值。在随后的增量中,由于测量值始终保持在第一阈值s-和第二阈值s 之间,因此由于电动推进系统已停止,保持了零设定点。
[0145]
应当注意,对于该实施例示例,电机的辅助在时间t4和t29之间提供给系统,其中设定点被调整到测量值以满足使用者的需要。
[0146]
作为非限制性示例,图6示意性示出了用于控制图4的电动推进系统的方法的第一变型。除了与图4中的阈值s-和s 进行比较之外,图6的控制定义了附加阈值s (第四阈值),其高于阈值s 。此阈值用于检测到须重新调整的设定点的偶尔的动力峰值。例如,如果阈值s 远高于阈值s 或如果动力峰值较高(例如用于医院病床越过门槛,或如果系统所要攀的短斜坡)可能是这种情况,但是在短期内。因此,位于两条相继的垂向线(垂直于时间轴t)之间的所考虑的增量prs (其用于将测量值与阈值s 进行比较)可以低于图4所用的增量,其用于将测量值与阈值s 和s-进行比较(用于阈值s 和s-的增量未在图6中示出)。
[0147]
在图6中,表示非驱动轮处的扭矩的信号的测量曲线cm在时间t100之前位于第一阈值s-和第二阈值s 之间。因此,设定点csg保持恒定直到时间t101。
[0148]
在对应于增量prs 的时间t100和时间t101之间,曲线cm的部分保持低于阈值s (并且更低于阈值s )。因此测量值不大于第二阈值s 。在位于时间t100和时间t101之间的增量prs 中,曲线的部分300和303保持低于阈值s ,而曲线的部分301高于阈值s 。因此,在位于t100和t101之间的增量prs 期间,不能认为测量值大于阈值s 。因此,扭矩设定点csg不会被修改。它在t101之后开始的下一个增量中保持恒定。
[0149]
在时间t101和时间t102之间,测量曲线cm在所考虑的各种增量中处于s-和s 之间。即使正好在时间t102之前曲线cm有轻微的超出,在时间t102结束的整个增量中也不存在这种超过阈值,因此不能认为在以时间t102结束的增量上测量值大于阈值s 。因此在t102和t103之间的下一个增量中设定点被保持。
[0150]
在时间t102和时间t103之间,曲线的部分304在整个增量上大于阈值s 。因此,在t102和t103之间的增量prs 的测量值大于在该增量中的阈值s 。因此,设定点增加了大于图4的步长的值,以便快速提供针对测量峰值所需的动力。因此对使用者的动力需求提供了快速响应。
[0151]
然后,在接下来的增量中,测量值保持在第一阈值s-和第二阈值s 之间,包括在时间t103处开始的增量,因为曲线的部分305低于阈值s 。因此,应用于从时间t103开始的增量的设定点csg在设定点曲线csg的整个末端上被保持。
[0152]
作为非限制性示例,图7示意性示出了用于控制图4的电动推进系统的方法的第二
变型。除了与图4中的阈值s-和s 进行比较之外,图7的控制定义了附加阈值s
‑‑
(第三阈值),其低于阈值s-。此阈值s
‑‑
用于检测须重新调整的设定点的偶尔的动力降低。例如,如果阈值s
‑‑
远低于阈值s-(例如,系统需要快速减速),或者如果动力在短期内显著降低,情况也可能如此。这可以对应于由可移除电动推进系统运输的医院病床过孔或者过下降的或多或少长的斜坡的情况。为此,位于两条连续垂向线(垂直于时间轴t)之间的所考虑的增量prs-,其用于将测量值与阈值s
‑‑
进行比较,可以低于用于图4的增量(用于阈值s 和s-的增量未在图7中示出)。
[0153]
在图7中,表示非驱动轮cm处的扭矩的信号的测量曲线在时间t201之前位于s-和s 之间。电机的扭矩设定点csg因此保持恒定。
[0154]
在对应于增量prs-的时间t201和时间t202之间,曲线cm的部分保持高于阈值s-(并且更高于阈值s
‑‑
)。曲线的部分200和203保持高于阈值s
‑‑
,而曲线的部分201低于阈值s
‑‑
。因此,在位于t201和t202之间的增量prs-期间,不能认为测量值低于阈值s
‑‑
。因此,扭矩设定点csg不会被修改。它在从t202开始的增量上保持恒定。
[0155]
在时间t202和时间t203之间,测量曲线cm在所考虑的各种增量上处于s-和s 之间。即使正好在时间t203之前存在曲线cm的一部分低于阈值s-,在t203结束的整个增量上,测量值也不低于阈值s-。因此在t203和t204之间的下一个增量中设定点被保持。
[0156]
在时间t203和时间t204之间,曲线的部分204低于阈值s
‑‑
。因此,在t203和t1204之间的增量prs-中的测量值低于阈值s
‑‑
。因此,设定点减小的值大于图4的步长。因此设定点的减小更大,这允许获得更显著的制动动作。
[0157]
在图7中,扭矩减小使得设定点故意设置为零,以便执行紧急停止。设定点不是由预先限定(预定义)的减少值确定,而是通过直接限定在时间t204开始的下一个增量中应用的设定点值来确定。因此,设定点的零值被限定在时间t204开始的增量中,以便产生紧急停止。该设定点然后在曲线cm的其余部分上保持在零值,曲线在t204之后的各种增量中保持在第一阈值s-和第二阈值s 之间。因此,停止被保持。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。