用于行单元的农业种沟深度调节
背景技术:
1.近年来,农民已经认识到需要选择并维持适当的种植深度,以确保适当的种子环境(例如,温度和湿度)和出苗。为了改进农艺实践,农民还需要了解实际种植深度与诸如出苗和产量等指标之间的关系。传统的农业种植机仅包括用于调节最大种植深度的设备,但由于土壤条件或种植机行单元上的下压力不足,在操作期间可能无法维持最大种植深度。即使在具有用于确定是否已经失去全种沟深度的传感器的现代种植机的操作中,仍不能确定种植的实际深度。因此,需要用于控制和/或测量由农业种植机开出的种沟的深度的系统、方法和设备。
附图说明
2.图1是农业行单元的实施例的右侧正视图。
3.图2是农业行单元的另一实施例的右侧正视图,为清楚起见移除了某些部件。
4.图3是图2的农业行单元的透视图。
5.图4是图2的农业行单元的透视图,为了清楚起见移除了右侧测量轮。
6.图5是图2的农业行单元的放大的局部右侧正视图。
7.图6是图2的农业行单元的后视图。
8.图7是深度调节组件和二次深度调节组件的实施例的侧视图。
9.图8是深度调节组件和二次深度调节组件的另一实施例的侧视图。
10.图9是深度调节组件和二次深度调节组件的另一实施例的侧视图。
11.图10是深度调节组件和二次深度调节组件的另一实施例的侧视图。
12.图10a是深度调节组件和二次深度调节组件的另一实施例的侧视图。
13.图11示意性地图示了用于控制垄沟深度的系统的实施例。
14.图12是深度调节组件和二次深度调节组件的另一实施例的侧视图。
15.图13是设置在行单元框架上的深度调节组件和二次深度调节组件的另一实施例的透视图。
16.图13a是沿着图13的线x-x看的图13的深度调节组件和二次深度调节组件的侧视图。
17.图13b是图13的深度调节组件和二次调节组件的放大透视图,其中移除了行单元框架。
18.图14是设置在行单元框架上的深度调节组件和二次深度调节组件的另一实施例的透视图。
19.图14a是沿着图14的线y-y看的图14的深度调节组件和二次深度调节组件的侧视图。
20.图14b是图14的深度调节组件和二次深度调节组件的侧视图,示出了一替代的实施例,其中滚轮替换为齿轮。
21.图15是深度调节组件的另一实施例的透视图,其中旋转致动器设置在行单元框架
上。
22.图15a是图15的深度调节组件的侧视图。
23.图15b是图15a的深度调节组件的侧视图,包括手动调节。
24.图16是深度调节组件的另一实施例的局部透视图,其中旋转致动器设置在行单元框架上的齿条上。
25.图16a是图16的深度调节组件的侧视图和局部剖视图。
26.图16b是图16的深度调节组件的另一实施例的侧视图和局部剖视图。
27.图16c是图16的深度调节组件的另一实施例的侧视图和局部剖视图。
28.图16d是图16c的实施例的后视图。
29.图16e是深度调节组件的另一实施例的后视图。
30.图17是示出了适应于深度调节组件的另一实施例的箱式行单元的侧视图。
31.图17a是图17的实施例的放大图。
32.图18是具有定位系统的深度调节组件的另一实施例的侧视图和局部剖视图。
33.图18a是图18的实施例的后视图。
34.图19是具有定位系统的深度调节组件的另一实施例的侧视图和局部剖视图。
35.图19a是图19的实施例的后视图。
36.图20a是具有定位系统的深度调节组件的另一实施例的透视图,其中所示定位系统安装到行单元框架构件。
37.图20b是图20a的深度调节组件实施例的放大透视图,其中移除了行单元框架构件。
38.图20c是图20b的实施例的透视图,其中移除了齿条。
39.图20d是图20b的实施例的右侧视图。
40.图20e是图20c的实施例的右侧视图。
41.图20f是图20c的实施例的后视图。
42.图20g是图20a的实施例的齿条的底部的透视图。
43.图20h是图20a的实施例的齿条和滚轮的另一透视图。
44.图20i是图20a的齿条的另一透视图。
45.图20j是图20a的实施例的齿轮箱的透视图。
46.图20k是图20j的齿轮箱的内部的蜗杆和蜗轮的透视图。
47.图21是具有定位系统的深度调节组件的另一实施例的侧视图和局部剖视图。
48.图22是类似于图20a的实施例且包括定位系统的深度调节组件的另一实施例的后视透视图。
49.图22a是图22的深度调节组件的实施例的前视透视图。
50.图23a和23b是图22的实施例的放大透视图,示出了uhmw引导件。
51.图24是图22的实施例的放大透视图,示出了从马达和电路板移除盖,以示出磁体和电路板上的霍尔效应传感器和电流传感器。
52.图25是图22的实施例的另一放大透视图,示出了从马达和电路板移除盖,以示出磁体、电路板上的霍尔效应传感器、另一电流传感器和加速度计。
53.图26是沿着图22的线26-26看的图22的实施例的放大剖视图,示出了在盖内磁体
与电路板上的霍尔效应传感器的关系。
54.图27是类似于图22的实施例并结合了归向系统的深度调节组件的另一实施例的后视透视图。
55.图28是深度调节组件的另一实施例的局部透视图,所示深度调节组件安装到种植机行单元的框架构件。
56.图29是图28的深度调节组件的相同的透视图,但移除了部件,以示出齿轮箱的实施例的内部部件。
57.图30是从前端向后看的图29中所示的深度调节组件的另一透视图。
58.图31是如图29中所示的深度调节组件的侧视图,图示了深度调节主体的枢转运动。
59.图32是深度调节组件的另一实施例的局部透视图,所示深度调节组件安装到种植机行单元的框架构件。
60.图33是图32的深度调节组件的相同的透视图,但移除了部件,以示出齿轮箱的实施例的内部部件。
61.图34是从前端向后看的图33中所示的深度调节组件的另一透视图。
62.图35是如图33中所示的深度调节组件的侧视图,图示了深度调节主体的枢转运动。
63.图36是深度调节组件的另一实施例的局部透视图。
64.图37是从前端向后看的图36的深度调节组件的另一透视图,但移除了部件,以示出齿轮箱的实施例的内部部件。
65.图38是如图37中所示的深度调节组件的侧视图,图示了深度调节主体的枢转运动。
66.图39是深度调节组件的另一实施例的局部透视图。
67.图40是从前端向后看的图38的深度调节组件的另一透视图,但移除了部件,以示出齿轮箱的实施例的内部部件。
68.图41是如图40中所示的深度调节组件的侧视图,图示了深度调节主体的枢转运动。
69.图42是示出了用于深度调节组件的致动器的马达和齿轮箱的实施例的透视图,深度调节组件结合了感应式传感器。
70.图43是沿着图42的线43-43看且示出了感应式传感器的实施例的图42的剖视透视图。
71.图44是图43的正视图,示出了感应式传感器,为了清楚起见以虚线示出齿轮箱外壳。
72.图45是图42中所示的齿轮的放大透视图,且示出了用于为不同的目标体提供不同的偏心曲面轮廓的可互换的凸轮的实施例。
73.图46是图45的分解图,示出了从齿轮移除可互换的凸轮。
74.图47是图46的可互换的凸轮的另一透视图。
具体实施方式
75.现在参考附图,其中相同的附图标记在若干视图中表示相同或对应的部件。图1图示了包括工具杆8的农机具,例如,种植机,多个行单元(row units)10以横向间隔的关系安装到工具杆8。每个行单元10优选地通过平行臂布置16安装到工具杆,使得行单元被允许相对于工具杆竖向平移。下压力致动器18可以安装到工具杆8和平行臂布置16并且被配置为能够向行单元10施加补充的下压力。
76.行单元10包括框架14,框架14支撑开沟圆盘组件60。开沟组件60可以包括两个成角度的开沟圆盘62,两个成角度的开沟圆盘62滚动地安装到框架14的向下延伸的柄部15。随着行单元10在向前的行进方向上行进经过田地,开沟圆盘62在土壤表面7中开出v形种沟(trench)3(即,垄沟、种子垄沟)。行单元10包括测量轮(gauge wheel)组件50,测量轮组件50可以包括两个测量轮52,两个测量轮52通过两个测量轮臂54枢转地安装到框架14的任一侧。测量轮52沿着土壤的表面滚动。在枢轴92处枢转地安装到框架14的深度调节组件90接触测量轮臂54,以限制测量轮臂54的向上行进,从而限制由开沟圆盘组件60开出的种沟的深度。合拢组件40优选地枢转地联接到框架14并被配置为能够将土壤移回种沟3中。
77.继续参考图1,种子5从料斗12输送到排种器30,排种器30被配置为能够对所供应的种子进行单粒化。排种器30可以是真空式计量器,诸如,申请人的国际专利公开no.wo/2012/129442中所公开的真空式计量器,其公开的全部内容通过引用并入本文。在操作中,排种器30优选地将所供应的种子放置到输种管32中,输种管32可以可移除地安装到框架14。在操作中,由排种器30放置的种子5通过输种管32落入种沟3中。
78.参考图2-6,更详细地图示了深度调节组件90。深度调节组件90包括枢转地安装到深度调节主体94的摇杆95。深度调节主体94围绕枢轴92枢转地安装到行单元框架14。手柄98可滑动地接收在深度调节主体94内,使得使用者能够选择性地使手柄(例如,分别为左钩99-1和右钩99-2,其可以形成为手柄98的一部分)与形成于行单元框架14内的多个深度调节槽97之一(图6)接合和脱离接合。参考图7,手柄98部分地滑动地接收在深度调节主体94的腔710内,并且可选的弹簧730接合设置在手柄98的底端上的环形唇缘740。弹簧730施加弹性力以将钩99(图6)保持在选定的槽97中,但允许使用者收回手柄98以暂时地使钩99从槽97脱离接合。在操作中,测量轮52的向上行进被测量轮臂54与摇杆95的接触所限制。当测量轮之一(例如,左侧测量轮52-1)遇到障碍物时,摇杆95允许左侧测量轮臂54-1向上行进,同时使右侧测量轮52-2降低相同的绝对位移,使得行单元10以障碍物的高度的一半升高。应当理解,还有与本文所述类似的具有手动调节的其他行单元。非限制性示例可在美国公开nos.us20170000003和us20170006757中找到,两者均通过引用并入本文。本文所述的深度调节组件与具有摇杆、枢轴和调节臂的类似系统一起使用。
79.应当理解,手柄98和深度调节主体94包括主深度调节子组件,主深度调节子组件被配置为能够允许使用者选择多个预选的垄沟深度之一。预选的垄沟深度各自对应于深度调节槽97之一。在一些实施例中,如稍后详细描述的,不是使用手柄98手动选择深度调节槽,而是可以使用致动器来调节手柄98的位置;例如,安装到行单元框架14的线性致动器(未示出)可以设置成调节手柄98的位置。替代地,旋转致动器可以转动齿轮,该齿轮调节手柄相对于深度调节槽97的位置。
80.在图7-10a和12中图示的每个实施例中,二次深度调节组件被配置为能够修改一
个或多个预选的垄沟深度。与由主深度调节组件实现的深度修改(例如,通过选择手柄98所接合的深度调节槽97)相比,二次深度调节组件可以以更精确的调节(例如,通过较小的调节步骤)来修改预选的垄沟深度。例如,参考图7,深度调节组件90a包括调节深度调节组件90a的有效长度的致动器720。在图示的实施例中,致动器720的延伸确定摇杆95相对于深度调节主体94的位置。如图所示,摇杆95枢转地安装到具有腔775的可动构件770,腔775用于接收安装到深度调节主体94(或与深度调节主体94形成为一部分)的突起760。突起760和腔775保持可动构件相对于深度调节主体94的对准,但允许致动器720沿着与摇杆95的枢转轴线平行的轴线修改位置。应当理解,针对手柄98的任何给定深度设置,致动器720的延伸(及由此深度调节组件的有效长度)的修改对垄沟深度进行修改。本文所述的任何二次深度调节组件可以用作唯一的深度调节,使得不需要设置主深度调节,并且由此二次深度调节可以在深度设置的整个范围上调节深度调整主体94。
81.图8图示了具有二次深度调节组件的深度调节组件90b的另一实施例,其中针对深度调节手柄98的任何给定设置,致动器800对一个或多个测量轮臂54受深度调节组件90b止动所处的角度位置进行修改。致动器800调节表面810的位置,该表面810枢转地安装到测量轮臂54;表面810设置成在测量轮臂54的最大向上行进点处接触摇杆95。因此,致动器800的延伸及由此表面810的位置的修改修改了测量轮的最大向上行进点且由此修改了由测量轮确定的垄沟深度。在一些实施例中,功能相似的致动器800和枢转地安装的表面810可以安装到两个测量轮臂54。
82.图9图示了具有二次深度调节组件的深度调节组件90c的另一实施例,其中修改的摇杆900被配置为能够修改其形状,以便针对手柄98的任何给定深度设置来修改垄沟深度。摇杆900包括部分910-1、910-2,部分910-1、910-2分别接触测量轮臂54-1和54-2,以限制测量轮臂的向上行进。致动器950改变部分910-1和910-2之间的角度,从而改变摇杆900的形状。致动器950的收回使构件910升高并由此修改测量轮臂54的最大高度和垄沟深度。
83.图10图示了具有二次深度调节组件的深度调节组件90d的另一实施例,其中摇杆95枢转地安装到深度调节主体94,优选为围绕由枢轴1010限定的横向延伸轴线枢转地安装到深度调节主体94。致动器1000优选地确定摇杆95围绕枢轴1010相对于深度调节主体94的角度位置,从而修改测量轮臂54的最大向上行程和垄沟深度。
84.图10a图示了图10中图示的实施例的替代方案。在该实施例中,图10中的枢轴1010被移除,并且摇杆95附接到围绕枢轴92枢转的连接件1011。
85.图12图示了具有二次深度调节组件的深度调节组件90e的又一实施例,其中致动器1230推进深度调节构件1210(例如,楔形件),该深度调节构件1210滑动地固定到测量轮臂并且被设置为沿着测量轮臂54的长度滑动。致动器1230(例如,诸如电动、液压或气动致动器等线性致动器)选择性地修改(例如,通过延伸或收回)深度调节构件1210的位置,例如,深度调节构件1210的沿着测量轮臂54的长度的位置。深度调节构件1210的沿着测量轮臂的长度的位置修改测量轮臂相对于摇杆95的最上角度位置,从而修改在操作中由行单元开出的垄沟的深度。致动器1230可以安装到测量轮臂54,例如,通过固定到安装至测量轮臂54的板1225。
86.在一些实施例中,致动器1230可以借助于偏压机构来调节深度调节构件1210的位置。随着致动器1230延伸,偏压机构可以增加或减小在楔形件1210上的偏压力。例如,如图
12中所示,致动器1230可以修改偏压构件(诸如,板1220)相对于深度调节构件1210的位置。可选地,第一弹簧1215a可以在其第一端处固定到深度调节构件1210并且可以在其第二端处固定到板1220。可选地,第二弹簧1215b可以在其第一端处固定到板1220并且可以在其第二端处固定到板1225。在图12中所示的未偏转位置中,弹簧1215a、1215b都不在偏压构件1210上施加相当大的力。随着致动器1230从未偏转位置前进,弹簧在偏压构件1220上(例如,大致朝向摇杆95)施加增加的前进力。随着致动器1230从未偏转位置收回,弹簧在偏压构件1220上(例如,大致远离摇杆95)施加增加的收回力。
87.在操作中,当从致动器1230(例如,经由图12中图示的偏压机构的弹簧1215a)传递到摇杆95的力的分量超过摇杆95在测量轮臂上(或者如果摇杆已接触深度调节构件,则在深度调节构件上)的相反作用力时,深度调整构件1210前进,迫使摇杆95远离测量轮臂并减小垄沟深度。应当理解,偏压力可以通过致动器1230的延伸逐渐构建,而不足以推进深度调节构件1210,直到致动器充分延伸或直到下压力减小。
88.图13和14是行单元框架14的透视图,分别示出了设置在行单元14上的深度调节组件90f和90g的替代实施例。
89.参考图13a,示出了沿着图13的线x-x看的深度调节组件90f的侧视图。图13b是深度调节组件90f的放大透视图,其中行单元框架14被移除,并且为了清楚起见,以虚线示出手柄98。
90.深度调节组件90f包括接收在行单元框架14的侧壁之间的外壳1494。通过手柄98在多个深度调节槽97之一内的接合,外壳1494能够沿着行单元框架14的深度调节槽97可调节地定位,以实现最初预选的垄沟深度。手柄98包括钩99-1、99-2,钩99-1、99-2延伸到槽97中,从而将外壳1494定位在所需的槽97处。
91.深度调节组件90f的二次深度调节组件包括致动器1450(诸如,电动马达)、驱动螺杆1410、驱动构件1420、凸轮臂1460和齿轮1430,所有这些都配合以相对于行单元框架14可调节地定位摇杆95,如下文所述。
92.如图13a中所示,驱动螺杆1410延伸到外壳1494中并且由致动器1450驱动。驱动螺杆1410被驱动构件1420以螺纹方式接收。齿轮1430可旋转地设置在驱动构件1420上。凸轮臂1460具有近端1461和远端1462。凸轮臂1460的远端1462围绕枢轴92可枢转地安装。凸轮臂1460的近端1461包括与齿轮1430接合的齿1463。摇杆95枢转地附接到凸轮臂1460的远端1462。止动件1470-1和1470-2可以设置在外壳1494中位于凸轮臂1460的任一侧上,以限制凸轮臂1460在顺时针旋转和逆时针旋转中的旋转运动。
93.在操作中,致动器1450使驱动螺杆1410旋转,导致以螺纹方式附接到驱动螺杆1410的驱动构件1420沿着驱动螺杆1410向上或向下螺纹行进,使得驱动构件1420在外壳1494内升高和降低。如果驱动螺杆1410通过致动器1450在一方向上旋转以使驱动构件1420沿着驱动螺杆1410向上螺纹行进,齿轮1430与凸轮臂1460的齿1463接合,使凸轮臂1460围绕枢轴92逆时针枢转(如图13a中所示),这使摇杆95相对于行单元框架14升高,允许测量轮臂54相对于框架构件14升高,从而增大垄沟深度。相反,如果驱动螺杆1410通过致动器1450在相反的方向上旋转以使驱动构件1420沿着驱动螺杆1410向下螺纹行进,齿轮1430与凸轮臂1460的齿1463接合,导致凸轮臂1460围绕枢轴92顺时针枢转(如图13a中所示),这迫使摇杆95相对于框架构件14降低,从而迫使测量轮臂54相对于框架构件14向下,并进而减小垄
沟深度。
94.参考图14a,示出了沿着图14的线y-y看的深度调节组件90g的侧视图。与90f的实施例类似,深度调节组件90g包括接收在行单元框架14的侧壁之间的外壳1594。通过手柄98在多个深度调节槽97之一内的接合,外壳1594能够沿着行单元框架14的深度调节槽97可调节地定位,以实现初始预选的垄沟深度。手柄98包括钩或钉99-1、99-2,钩或钉99-1、99-2延伸到槽97中,从而将外壳1594固定在所需的槽97处。
95.深度调节组件90g的二次深度调节组件包括致动器1550(诸如,电动马达)、驱动螺杆1510、驱动构件1520、凸轮臂1560和滚轮1565(图14a)或齿轮1530(图14b),其配合以相对于行单元框架14可调节地定位摇杆95,如下文所述。
96.如图14a中所示,驱动螺杆1510延伸到外壳1594中并由致动器1550驱动。驱动螺杆1510由驱动构件1520以螺纹方式接收。驱动构件1520具有与滚轮1565接合的倾斜侧1521,滚轮1565可旋转地附接到凸轮臂1560的近端1561。凸轮臂1560的远端1562围绕枢轴92可枢转地安装。摇杆95可枢转地附接到凸轮臂1560的远端1562。在图14b中所示的替代实施例中,滚轮1565替换为可旋转的齿轮1530,并且倾斜侧1521包括齿1563,随着齿轮1530旋转,齿1563与齿轮1530接合。止动件1570-1和1570-2可设置在外壳1594中位于凸轮臂1560的任一侧,以限制凸轮臂1560在顺时针旋转和逆时针旋转中的旋转运动。
97.在操作中,致动器1550使驱动螺杆1510旋转,从而使以螺纹方式附接到驱动螺杆1510的驱动构件1520沿着驱动螺杆1510向上或向下螺纹行进,使得驱动构件1520在外壳1594内升高和降低。如果驱动螺杆1510通过致动器1550在一方向上旋转,以使驱动构件1520沿着驱动螺杆1510向上螺纹行进,滚轮1565将沿着倾斜侧1521向下滚动,使得凸轮臂1560围绕枢轴92逆时针枢转(如图14a中所示),这使摇杆95相对于行单元框架14升高,允许测量轮臂54相对于框架构件14升高,从而增加垄沟深度。相反,如果驱动螺杆1510通过致动器1550在相反的方向上旋转,以使驱动构件1520沿着驱动螺杆1510向下螺纹行进,滚轮1565将沿着曲面1521滚动,使得凸轮臂1560围绕枢轴92顺时针枢转(如图14a中所示),这迫使摇杆95相对于框架构件14降低,从而迫使测量轮臂54相对于框架构件14向下,进而减小垄沟深度。应当理解,关于图14b中所示的实施例,其中滚轮1565和倾斜表面1521替换为与倾斜表面1521上的齿1563接合的齿轮1530,完成相同的动作。
98.在实施例90a、90b、90c、90d、90e、90f和90g中的任一实施例的替代实施例中,深度调节主体94、1494或1594不需要是可调节的。深度调节主体94、1494或1594可以相对于框架14保持固定,并且实施例90a、90b、90c、90d、90e、90f和90g中的任一实施例的二次调节组件将提供深度调节的整个范围。代替在枢轴92处枢转,深度调节主体94、1494或1594固定到框架14。
99.任何致动器(720、800、950、1000、1230、1450、1550)可以是电动、液压或气动致动器。
100.图15和15a图示了深度调节组件90h的另一实施例,其中旋转致动器1650(诸如,电动马达)转动齿轮1640-1和1640-2,其调节深度调节主体1694相对于深度调节槽97的位置。齿轮1640-1和1640-2分别具有在槽97中接合的齿1641-1和1641-2。旋转致动器1650连接到深度调节主体1694,深度调节主体1694在枢轴92处可枢转地安装到框架14。摇杆95可枢转地安装到深度调节主体1694。旋转致动器可以采用齿轮减速(诸如,300:1),以允许齿轮
1640-1和1640-2旋转较小。在该实施例中,旋转致动器1650替换手柄98。该实施例可以用作唯一的深度调节组件,或者其可以用作主深度调节组件并与前面描述的任何其他二次深度调节组件结合使用。
101.图15b图示了与深度调节组件90h类似的深度调节组件90h-1的替代实施例,但其中深度调节主体1694替换为深度调节主体1695、手柄轴1698和弹簧1630。手柄轴1698附接到致动器1650,并且部分地滑动地接收在深度调节主体1695的腔1696内。弹簧1630与设置在手柄轴1698的底端上的环形唇缘1680接合。因此,弹簧1630施加弹性力以将齿轮1640保持在选择的槽97中,但允许使用者利用附接到致动器1650的手柄1660收回致动器1650,以暂时将齿轮1640从槽97脱离接合到所需的预设深度,以使为到达选择的深度,致动器1650需要行进的量最小化。
102.图16和16a图示了深度调节组件90i的另一实施例,其中齿条1710设置在行单元14上处于深度调节槽97上方。从枢轴92到齿条1710的半径r(图16a)沿着具有两行齿1716-1、1716-2的齿条1710保持不变。旋转致动器1750设置在齿条1710上方并且在齿轮箱1720处连接到手柄轴1798。旋转致动器1750包括连接到齿轮箱1720的马达1730。在图16的后视透视图中,为了清楚起见,移除了旋转致动器1750,以更好地示出齿条1710。齿轮箱1720具有齿轮1740,齿轮1740具有用于与齿条1710啮合的齿1741。在图16a中仅可见一个齿轮,但应当理解,具有相应的齿1741-1、1741-2的相应的齿轮1740-1、1740-2将与齿条1710的相应的齿1716-1、1716-2可旋转地接合。手柄1799可以设置在马达1730上,以允许旋转致动器1750从齿条1710脱离接合,以运动到齿条1710上的不同位置,以预设选择的深度。旋转致动器1750可以采用齿轮减速(诸如,300:1),以允许齿轮1740-1和1740-2旋转较小。在该实施例中,旋转致动器1750替换之前的实施例中描述的手柄98。手柄轴1798在齿轮箱1720处附接到致动器1750,并且部分地滑动地接收在深度调节主体1794的腔1796内。弹簧1791接合设置在手柄轴1798的底端上的环形唇缘1795。弹簧1791施加弹性力以保持齿轮1740与齿条1710啮合,但允许使用者利用附接到致动器1750的手柄1799收回致动器1750,以暂时使齿轮1740从齿条1710脱离接合。深度调节主体1794在枢轴92处可枢转地安装到框架14。摇杆95枢转地安装到深度调节主体1794。
103.图16b图示了深度调节组件90i-1的替代实施例,类似于深度调节组件90i,但其中手柄1799替换为手动调节器1780。手动调节器1780可以是旋钮、螺栓头或其他合适的部件,以允许使用者在马达1730不能被电动驱动时通过手或工具手动运动马达1730,以调节深度调节组件90i-1。
104.图16c是进一步包括旋转致动器1750a的深度调节组件90j的另一实施例的侧视图和局部剖视图。图16d是图16c的实施例的后视图。在该实施例中,齿条1710包括在相应的齿1716-1和1716-2的横向向内侧的架子1714-1和1714-2。滚轮1712-1和1712-2固定到延伸通过齿轮箱1720的轴1715。滚轮1712-1和1712-2骑在相应的架子1714-1和1714-2上。弹簧1791对齿轮1740-1和1740-2施加的力减小,因为该力通过架子1714-1和1714-2上的滚轮1712-1和1712-2作用,从而允许齿轮1740-1和1740-2更容易在齿1716-1和1716-2上运动。此外,更容易保持齿轮啮合的中心距。类似于图16b,手柄1799可以替换为手动调节器1780。图16e图示了深度调整组件90j-1的替代实施例,类似于深度调整组件90j,但具有与齿轮1740-1和1740-2同轴的滚轮1712-1和1712-2。这简化了图16c和16d中所示的实施例,以允
许深度调节组件90j-1具有跨齿1716的全范围运动。
105.图17是诸如在美国专利no.6,827,029(“案件'029专利”)中公开的常规的箱式行单元1810的侧视图,该专利以引用的方式并入本文,其适应于深度调节组件90x的另一实施例,如下所述。图17a是图17的局部放大图。常规的箱式行单元包括调节手柄(在案件'029专利的图2中由附图标记90标识),该调节手柄被移除并替换为致动器1850,致动器1850联接到与调节杆1860接合的螺钉1841(对应于案件'029专利的图2中的杆92)。深度调节组件90x经由支架1870安装到行单元1810,支架1870具有附接到通道构件1814的支架臂1871-1和1871-2。致动器1850包括马达1830和齿轮箱1820,致动器1850驱动轴1821,轴1821经由联接器1840联接到螺纹杆1841。螺纹杆1841与延伸穿过通道构件1814的调节杆1860以螺纹方式接合。调节杆1860具有接收器端1861,接收器端1861具有用于以螺纹方式接收螺杆1841的螺母1862。调节杆1860延伸穿过通道构件1814并在其远端处连接到摇杆1895。摇杆1895销接到调节杆1860的远端并且作用在相应的测量轮臂1894-1和1894-2上。测量轮臂1894-1和1894-2分别经由枢轴1892-1和1892-2枢转地连接到行单元1810的框架构件。测量轮52-1和52-2分别连接到测量轮臂1894-1和1894-2。
106.图18和18a图示了深度调节组件90k的另一实施例,其利用齿条1710和距离传感器1717来确定致动器1750b沿着齿条1710的位置。图18a是图18的后视图。在该实施例中,距离传感器1717设置在齿轮箱1720的底部,并设置在设置于齿条1710的内表面1722上的凸台1721上方。在该实施例中,凸台1721相对于齿1716的恒定半径具有不断变化的距离。感测距离的这种变化,距离传感器1717与深度控制和土壤监控系统300(稍后讨论)通信。
107.图19和19a图示了深度调节组件90l的另一实施例,其利用齿条1710和距离传感器1717来确定致动器1750c沿着齿条1710的位置。图19a是图19的后视图。在该实施例中,距离传感器1717设置在手柄轴1798上。与距离传感器1717相邻的凸台1723的内壁1718具有横向于手柄轴1798的行进方向的不断变化的宽度。到内壁1718的距离的变化通过与深度控制和土壤监控系统300通信的距离传感器1717感测。
108.距离传感器1717可以是能够测量距离的任何传感器。距离传感器的示例包括但不限于霍尔效应传感器和感应式传感器。
109.图20a至20k图示了深度调节组件90m的另一实施例,其利用齿条1910和距离传感器1917来确定致动器1950沿着齿条1910的位置。在该实施例中,距离传感器1917设置在齿条1910的凸台1921的上方。在一种实施例中,距离传感器1917附接到齿轮箱1920。在该实施例中,凸台1921相对于齿1916的恒定半径具有不断变化的距离。感测距离的这种变化,距离传感器1917与深度控制和土壤监控系统300通信。替代地,齿条1910可以具有与齿条1710上的内壁1718类似的内壁,其中距离传感器设置为感测到内壁的距离的变化(未示出)。
110.在深度调节组件90m中,致动器1950设置在齿条1910上并且与齿条1910接合。致动器1950包括连接到齿轮箱1920并驱动齿轮箱1920的电动马达1930。齿轮箱1920驱动齿轮1940-1和1940-2。齿轮1940-1和1940-2分别具有齿1941-1和1941-2,用于接合齿条1910上的齿1916(1916-1和1916-2)。
111.如图20f中最佳所示,齿轮箱1920经由轴1998连接到深度调节主体1994,深度调节主体1994围绕枢轴92枢转以调节摇杆95。在一种实施例中,轴1998经由连接件1922(图20e)连接到齿轮箱1920。轴1998终止于处于深度调节主体1994内侧的环形唇缘1995(图20f)。施
力构件1991(诸如,弹簧)设置在深度调节主体1994中,以经由环形唇缘1995迫使轴1998远离深度调节主体1994。在施力构件1991是弹簧的实施例中,环形唇缘1995可以具有小块1997,并且深度调节主体1994可以具有小块1996,弹簧1991围绕小块1997和小块1996设置以帮助将弹簧1991保持在深度调节主体1994内。
112.如图20g中最佳所示,在一种实施例中,齿条1910可以具有一个或多个突起1929,一个或多个突起1929可以与框架14上的深度调节凹口97接合,深度调节凹口97通常在大多数框架上都可以找到(未示出)。
113.齿轮箱1920包括附接到其侧面的轮1913-1和1913-2(参见图20h,为了清楚起见,移除了齿轮箱1920)。轮1913-1和1913-2分别接合齿条1910上的架子1919-1和1919-2。轮1913-1和1913-2的接合可以在图20h和20i中最佳示出。图20i是齿条1710的透视图,示出了凸台1921相对于齿1916-2和凸台1919-2的变化半径。
114.图20j示出了齿轮箱1920,且图20k示出了齿轮箱1920的内部部件,其中移除了齿轮箱外壳1925,以示出蜗轮1927、轮1928(或1928-1和1928-2)和轴1926。联接到由马达1930驱动的可旋转轴1931的蜗轮1927使轮齿轮1928和轴1926转动。齿轮1940-1和1940-2围绕轴1926设置。在一种实施例中,蜗轮1927和轮齿轮1928由粉末金属制成。在一种实施例中,为了便于组装,轮齿轮1928由两个部件制成,左侧轮齿轮1928-1和右侧轮齿轮1928-2,其均可以由粉末金属制成。
115.图21是深度调节组件90n的另一实施例的侧视图。组件90n是组件90m的替代方案,其中轮齿轮/小齿轮替换为一个或多个蜗轮。在该实施例中,齿轮箱1980经由轴1998连接到深度调节主体1994,深度调节主体1994围绕枢轴92枢转以调节摇杆95。蜗轮1981设置在齿轮箱1980的任一侧或两侧并位于齿条1910上方,蜗轮1981具有与齿条1910的齿1916接合的飞板(flights)1982。蜗轮1981具有轴1983,轴1983由电动马达1984可旋转地驱动。轴1983支撑在u形支架1985内,u形支架1985由齿轮箱1980支撑。为了与前述实施例保持一致,应当理解,深度调节组件90n可以包括对应的左侧和右侧蜗轮1981、飞板1982、轴1983、马达1984和支架1985,其针对设置在齿条1910的相应的左侧轮齿1916-1和右侧轮齿1916-2上方的那些部件由后缀
“‑
1”和
“‑
2”区分。然而,由于图21是侧视图,仅
“‑
2”部件是可见的。
116.图22-26图示了深度调节组件90p的另一实施例。与之前描述的实施例90m一样,深度调节组件90p利用包括电动马达2030的致动器2050。对于该实施例90p,齿轮箱、齿条和深度调节主体以及各个部件的相互作用与之前结合实施例90m描述的相同。同样地,在图示实施例90p的附图中,与用于实施例90m的相同的附图标记用于相同或对应的部件。因此,为简洁起见,由于齿轮箱1920、齿条1910和深度调节主体1994对于两种实施例90p和90m是相同的,这里将不再重复对各个部件的描述、操作和相互作用。
117.然而,与实施例90m不同,实施例90p利用感测深度调节主体1994相对于齿条1910的位置的不同的方法。参考图24、25和26,环形磁体2010和霍尔效应传感器2012用于对马达转数进行计数,以检测深度调节主体1994相对于齿条1910的位置。加速度计2014还测量深度调节主体1994相对于齿条1910的角度(即,位置)。电流传感器2016、2018检测马达2030或如图20k中图示且如之前结合实施例90m描述的具有与轮齿轮或齿轮1928接合的蜗轮1927的马达轴1931的两个旋转方向。环形磁体2010设置为与马达2030或马达轴1931一起旋转。霍尔效应传感器2012、加速度计2014和电流传感器2016、2018安装到保护性外壳2022内的
电路板2020,并与稍后讨论的种植机监控器50数据通信。
118.可选地,手动按钮2023和2024可以安装到电路板2020,用于在任一方向手动推进深度调节组件90p。每个手动按钮2023和2024可以被配置为能够在与另一手动按钮2023或2024相反的方向上使深度调节组件90p运动。每个手动按钮2023和2024可以被配置为能够通过按下按钮使深度调节组件90p运动预定的距离。例如,按一下可将深度调节组件90p推进1/8英寸(0.32厘米)。此外,按住任一手动按钮2023或2024将连续地推进深度调节组件90p。手动调节可用于手动校准深度调节组件90p或使深度调节组件90p运动到不阻碍的位置以允许操作员在任何设备上工作。在另一实施例中,同时按下手动按钮2023和2024可以编程以执行选定的功能,诸如,将深度调节组件90p运动到最浅或最深的设置。
119.校准
120.在校准深度调节组件90p的一种方法中,致动器2050相对于起始位置“归位”或“归零”。零位或原位可以与最浅设置、与最深设置、与最浅设置和最深设置、或与在最浅设置和最深设置之间的已知深度(诸如,例如两英寸深度)相关联。
121.举例来说,为了使致动器2050归零或归位到最浅深度,马达2030被命令经由种植机监控器50致动,以使齿轮接合并旋转,从而使深度调节主体1994沿着齿条2010朝向最浅位置运动,直到齿轮箱1920或深度调节主体1994与齿条1910上的前止动件邻接为止。当到达前止动件时,电流传感器2016、2018之一检测的电流将开始急升,表明齿轮箱1920或深度调节主体1994处于可能的最浅设置,从而确立零位或原位。检测到的与零位或原位相关联的电流急升可能在马达全电流的5%到20%之间。例如,如果马达2030是18安培马达,当电流达到2安培(即,马达全电流的约10%)时,马达被命令关闭,并且该位置与“零”位或“原”位相关联。换言之,可以命令马达在电流达到全电流之前关闭,以防止马达超负荷运转。在其他实施例中,电流急升可以不超过马达全电流的95%,或不超过90%,或不超过80%,或不超过70%,或不超过60%,或不超过50%,或不超过40%,或不超过30%,或不超过马达全电流的25%。
122.一旦确立原位或零位,则将已知厚度(例如,两英寸)的块放置在每个测量轮52-1、52-2的下方,以模拟已知的种沟深度设置(即,测量轮相对于开沟圆盘所允许的行进距离)。然后,命令马达2030致动以使齿轮接合并旋转,以使深度调节主体1994朝向最深种沟深度设置运动,直到电流传感器2016、2018之一检测到电流的另一急升为止,表明测量轮牢固地压抵块,并确立已达到预定的种沟深度设置(例如,对应于块厚度的两英寸深度)。随着深度调节从最浅位置运动直到达到预定的块深度设置,马达2030或马达轴1931的转数经由检测磁体2010(与马达2030或马达轴1931一起旋转)的旋转的霍尔效应传感器计数。所计数的转数,无论是马达2030的还是马达轴1931的,在下文中都称为“转数”。因此,转数的数量将对应于预定的深度设置(在此示例中,基于布置在测量轮下方的块的已知厚度,预定的深度设置为两英寸深度)。因此,在校准到已知的块厚度之后,可以应用转数与深度变化之间的关系(线性或非线性,取决于行单元10的形状),以基于转数确定在致动器2050或深度调节主体1994相对于齿条1910的整个运动范围内的深度。
123.还应当理解,不是将致动器归零或归位到最浅深度,而是致动器可以归零或归位到最深深度。在这种方法中,马达2030被命令经由种植机监控器50致动以使齿轮接合并旋转,以使深度调节主体1994沿着齿条2010朝向最深位置运动,直到齿轮箱1920或深度调节
主体1994与齿条1910上的前止动件邻接为止。当到达前止动件时,电流传感器2016、2018之一检测到的电流将开始急升,表明齿轮箱1920或深度调节主体1994处于可能的最深设置,其确立零位或原位。一旦确定零位或原位,则将已知厚度(例如,两英寸)的块布置在每个测量轮52-1、52-2下方,以模拟已知的种沟深度设置(即,测量轮相对于开沟圆盘所允许的行进距离)。到可能的最深设置的好处在于:种植机的重量由每个行单元10上的开沟圆盘62承载,使得不需要使种植机升高。这允许将块布置在每个测量轮52下方。然后,命令马达2030致动以使齿轮接合并旋转,以使深度调节主体1994朝向最浅种沟深度设置运动,直到由电流传感器2016、2018之一检测到电流的另一急升为止,表明测量轮牢固地压抵块,进而表明已达到预定的种沟深度(例如,对应于块厚度的两英寸深度)。随着深度调节主体1994从最深位置运动直到达到预定的块深度设置,经由检测磁体2010(与马达2030或马达轴1931一起旋转)的旋转的霍尔效应传感器对马达2030或马达轴1931的转数进行计数。因此,转数的数量将对应于预定的深度设置(在此示例中,基于布置在测量轮下方的块的已知厚度,预定的深度设置为两英寸深度)。因此,在校准到已知的块厚度之后,可以应用马达转数与深度变化之间的关系(线性或非线性,取决于行单元10的形状),以基于转数确定在致动器2050或深度调节主体1994相对于齿条1910的整个运动范围内的深度。在校准之后,可以再次将深度设置为最大,使得可以在不需要使种植机升高的情况下就移除块。
124.还应当理解,零位或原位不必位于最浅位置或最深位置。相反,零位或原位可以与最浅设置和最深设置之间的已知深度(例如,两英寸深度)相关联。举例来说,如果希望将零位或原位与两英寸的种沟深度(即,测量轮相对于开沟圆盘所允许的行进距离)相关联,则致动器2050或深度调节主体1994可以最初布置在最浅设置或最深设置处,然后可以在每个测量轮52-1和52-2下方布置2英寸厚的块。然后,可以命令马达2030使深度调节主体1994朝向最浅位置或最深位置行进。随着深度调节主体1994朝向最浅位置或最深位置运动,对马达转数进行计数,直到随着测量轮52-1、52-2开始接触块而观察到电流急升为止。深度调节主体1994的检测到电流急升所处的位置(即,在本示例中为两英寸深度除)被确立为零位或原位。当致动器2050或深度调节主体1994从确立的零位或原位朝向较深或较浅的设置运动时,马达2030或马达轴1931的转数(在深度的增加或减少的方向上)从已确立的零位或原位开始计数。如前所述,可以应用转数与深度变化之间的线性关系来基于转数确定致动器2050或深度调节主体1994的整个运动范围内的深度。
125.可以针对种植机的每个行单元重复上述校准过程,这可以针对每个行单元顺序地执行,或者可以同时校准所有行单元。应当理解,只需要设置零位或原位,因为在测量轮下方使用的块的厚度是已知的,其设置种沟深度。还应当理解,并非所有行都需要利用上述方法归零。行的子集,例如,50%、33%、25%、20%或小于100%的任何数,可以根据任何上述方法归零或归位。然后,对归零的行的子集进行平均,以提供平均的零位或原位,然后可以将其相等地应用在所有行上或应用在未归零的行上。
126.在上述任何示例中用于检测当测量轮接触块时的电流急升的校准过程期间,可以利用下压力传感器来确保在各个行单元10上测量轮52-1和52-2上的一致负载。例如,下压力系统,诸如可从precision planting llc,23207townline road,tremont,il 61568获得的系统(在国际公布no.wo2014/018716中所描述的),可用于确保在每个行单元10处测量轮52-1和52-2上的一致负载,以确保整个农机具的统一结果。
127.还应当理解,通过如前所述经由启动手动按钮2023或2024使深度调节组件90p运动来使深度调节组件90p运动到零位或原位,可以手动地校准深度调节组件90p。
128.当在田间、特别是免耕的田间作业时,齿条1910可能会充满碎屑,这会限制致动器2050在齿条1910上的行进,从而导致较早的电流急升,这是由于深度调节主体1994或齿轮箱1920邻接填充齿条1910的碎屑,而不是深度调节主体或齿轮箱1920邻接齿条1910上的前止动件。这种由于与碎屑邻接而导致的较早或过早的电流急升将导致错误或不正确的原位或零位。因此,可能需要将致动器2050或深度调节主体1994归位或归零在齿条1910的中点处或在齿条1910的任一端之间碎屑不太可能积聚的一些其他点处,以避免错误或不正确的原位或零位。
129.图27是深度调节组件90q的另一实施例的后视透视图。在该实施例中,深度调节组件90q与之前描述的深度调节组件90p基本相同,但结合了用于使致动器2050或深度调节主体1994相对于齿条1910上的在齿条1910的端部之间的位置归位的归位系统1970。归位系统1970包括传感器1971和目标体1972。目标体1972可以是磁体,并且传感器1971可以是霍尔效应传感器。替代地,传感器1971可以是感应式传感器,并且目标体1972可以是可由感应式传感器检测的金属块。传感器1971可以设置在齿轮箱外壳1925上,并且目标体1972可以设置在齿条1910上,诸如,在沿着齿条1910行进的中点处或在不位于齿条1910的任一端处的另一点处的架子1919-1、1919-2的一个边缘1912-1、1912-2上。传感器1971可以连接到电路板2020,电路板2020可以与监控器50进行数据通信。当传感器1971设置在目标体1972上方时,确立原位或零位。因此,如果目标体1972位于齿条1910的中点处,则原位或零位将是齿条1910的中点。如前所述,可以应用转数与深度变化之间的线性关系来基于从零位或原位沿着任一方向的转数来确定致动器2050或深度调节主体1994的整个运动范围内的深度。
130.应当理解,归位系统1970可以与上述归零或归位方法结合使用或替代上述归零或归位方法使用。
131.作为如上所述基于转数的数量的深度的验证或检查,转数可以与由加速度计2014检测的致动器2050或深度调节主体1994的角度相关联。转数与由加速度计2014检测的实际测量角度的相关性将确保适当的深度校准,以考量来自制造商的部件的几何结构的变化并考量行单元上的磨损部件。标准校准方程可用于关联深度设置(基于转数),因为来自磁体和霍尔效应传感器的预定数量的脉冲与预定的深度变化相关。例如,测试已表明250转数(磁体旋转经过霍尔效应传感器产生250个脉冲)与垄沟深度的大致0.11英寸(0.28厘米)变化相关,并且这种与转数相关的垄沟深度的变化在整个深度范围内基本上是线性的。因此,在使用归位系统1970校准到已知的块厚度或原位之后,可以应用转数与深度变化之间的线性关系来确定致动器2050或深度调节主体1994的整个运动范围内的深度。类似地,如果种植深度的变化相对于转数基本上是线性的,则由加速度计2014检测的致动器2050或深度调节主体1994的角度同样可以使用标准校准方程关联。
132.此外,已知与种沟深度设置相比,不同的土壤、耕作方式和田间条件会影响实际的种沟深度。因此,例如,如果命令的深度是2英寸(5厘米),但在田间的实际深度测量表明种沟只有1.5英寸(3.8厘米),那么校准偏差可以应用于以实际种沟深度“校正”致动器2050或深度调节主体1994的位置,以考量田间条件。
133.然而,应当理解,如果转数与在致动器2050或深度调节主体1994的整个运动范围
内的深度变化之间的关系不是线性的,则可能需要非线性关系,以将深度与转数并与由加速度计2014检测的测量角度相关联。本领域普通技术人员将理解这种非线性相关性。
134.对于本文所述的任何深度调节组件,这些深度调节组件具有作为其致动器(例如,1450、1550、1650、1750、1850、1950、2050)的一部分的马达,可以通过马达(1450、1550、1650、1730、1830、1930、1984、2030)基于其在任一方向上的旋转来确定设置深度。如果马达(1450、1550、1650、1730、1830、1930、1984、2030)是步进马达,则通过深度控制和土壤监控系统300可以跟踪在任一方向上的步数。
135.诊断
136.通过将针对一个行单元的深度调节主体1994所检测的角度与种植机上的其他行单元的加速度计的读数进行比较,可以将由加速度计2014检测的角度用作行单元上的霍尔效应传感器的诊断工具。例如,如果由一个行单元的加速度计2014检测的角度与由其他行单元的加速度计2014检测的角度明显不同,则霍尔效应传感器可能存在故障,无法对马达2030或马达轴1931的转数进行准确计数。
137.另外,如果对行单元进行修复或更改并且将致动器2050安装在与其初始位置不同的位置,则加速度计2014将检测到与其他行单元的加速度计2014的读数相关的这种差异,并且可以在种植机监视器上给操作员显示差异,以通知操作员需要进行调节。
138.此外,可以参考srm加速度计来验证致动器2050的位置。例如,假设种植机在平坦的地面上运行,并且加速度计2014和致动器2050在齿条1910上处于30度角,但随后地形变化为10度的上坡,这种坡度变化将导致加速度计2014发出信号,表明致动器2050已意外地(但实际上是正确的,只是地形发生了变化)从其命令位置运动。为了避免此类错误读数,将由加速度计2014生成的信号与由在srm上的加速度计生成的信号进行比较。因此,随着地形变化,来自srm的重力矢量发生变化,并且可以相对于加速度计2014来参考该重力矢量,以确认致动器2050没有运动。
139.此外,如果在深度调节主体1994不处于齿条1910上的行程的任一端附近且霍尔效应传感器未能拾取表明马达2030已停转的任何脉冲时电流急升,那么电流传感器2016、2018可以检测致动器2050中是否存在干扰情况。
140.附加的深度调节组件实施例
141.图28-31图示了深度调节组件90r的另一实施例。深度调节组件90r包括致动器3050,致动器3050包括电动马达3030。电动马达3030可以是伺服马达、减速马达或步进马达。如果使用减速马达,减速马达可以被齿轮减速以在不被供以动力旋转时能有效地自锁。替代地,如果马达3030不是自锁的,则可以结合制动器以防止蜗轮3032、齿轮3036或轴3038(均在后面讨论)的旋转。应当理解,与要么沿着深度调节槽97运动(例如,图15-15b的90h和90h-1),要么沿着设置在深度调节槽97上方的齿条运动(例如,图16-16e和图18-27的90i-90q)的实施例90h-90q不同,在深度调节组件90r的实施例中,致动器/马达3050/3030不沿着行单元框架14行进。反而,在深度调节组件90r的实施例中,致动器/马达3050/3030通过安装组件3000相对于框架14固定就位。安装组件3000可以包括固定到(例如,通过未示出的螺栓)在行单元10的深度调节槽97上方的行单元框架14的安装框架3002。马达安装件3004刚性地附接到安装框架3002,马达3030和齿轮箱3020由安装框架3002支撑。
142.图29是与图28相同的视图,但是为了清楚起见,框架14、测量轮臂54和安装组件
3000被移除。此外,齿轮箱外壳3006也被移除,以示出齿轮箱3020的内部齿轮的结构和布置。图30是图29的向后看的另一透视图。马达3030联接到蜗轮3032并驱动蜗轮3032,蜗轮3032包括围绕可旋转的轴3034的螺旋齿3033。螺旋齿3033与齿轮3036的凹口3035接合。齿轮3036旋转地固定到横向轴3038,并且横向轴3038旋转地固定到u形接头3040。连杆3042将u形接头3040枢转地连接到深度调节主体3044。深度调节主体3044通过枢轴92枢转地连接到行单元框架14。深度调节主体3044可以与上面结合实施例90m公开的深度调节主体1994(参见图20e和20f)相同,但在该实施例中,不需要如结合实施例90m所描述的轴1998和弹簧1991。摇杆95枢转地附接到深度调节主体3044的下端。
143.图31是图29的侧视图。如图31中的虚线所示,蜗轮3032通过马达3030的旋转导致齿轮3036由于螺旋齿3033与齿轮3036的凹口3035的接合而旋转。齿轮3036的旋转导致轴3038旋转,进而使u形接头3040枢转。由于u形接头3040通过连杆3042连接到深度调节主体3044,因此深度调节主体3044被迫使围绕枢轴92枢转,从而使摇杆95运动(如虚线所指示的)。如前所述,对摇杆95与测量轮臂54接合所处的位置进行调节限制了测量轮臂54的向上运动,这又限制了测量轮52的底部相对于开沟圆盘62的底部的向上行进,从而设置了开沟圆盘62进入土壤表面的穿透深度,进而设置了种子垄沟3的深度。
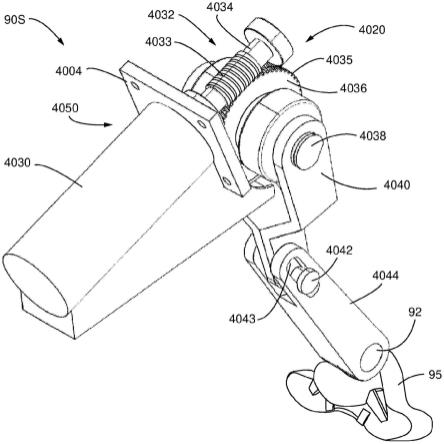
144.图32-35图示了深度调节组件90s的另一实施例。像前面的实施例90r,存在致动器4050,其包括电动马达4030。电动马达4030可以是伺服马达、减速马达或步进马达。如果使用减速马达,则减速马达可以被齿轮减速以在不被供以动力以旋转时能有效地自锁。替代地,如果马达4030不是自锁的,则可以结合制动器以防止蜗轮4032、齿轮4036或轴4038(均在后面讨论)的旋转。如在实施例90r中,该实施例中的致动器/马达4050/4030通过安装组件4000相对于框架14固定。安装组件4000可以包括固定到行单元10的深度调节槽97上方的行单元框架14的安装板或框架4002(例如,通过未示出的螺栓)。马达安装件4004刚性地附接到安装框架4002,马达4030和齿轮箱4020由安装框架4002支撑。
145.图33是与图32相同的视图,但是为了清楚起见,框架14、测量轮臂54和安装组件4000被移除。此外,齿轮箱外壳4006也被移除,以示出齿轮箱4020的内部齿轮的结构和布置。图34是图33的向后看的透视图。马达4030联接到蜗轮4032并驱动蜗轮4032,蜗轮4032包括围绕可旋转的轴4034的螺旋齿4033。螺旋齿4033与齿轮4036的凹口4035接合。齿轮4036旋转地固定到横向轴4038,并且横向轴4038旋转地固定到u形接头4040。深度调节主体4044包括槽4043。销4042延伸穿过槽4043并将u形接头4040枢转地连接到深度调节主体4044。深度调节主体4044通过枢轴92枢转地连接到行单元框架14。摇杆95枢转地附接到深度调节主体4044的下端。
146.图35是图33的侧视图。如图35中的虚线所图示的,蜗轮4032通过马达4030的旋转导致齿轮4036由于螺旋齿4033与齿轮4036的凹口4035的接合而旋转。齿轮4036的旋转导致轴4038旋转,进而使u形接头4040枢转。由于u形接头4040通过可在槽4043内运动的销4042连接到深度调节主体4044,因此深度调节主体4044被迫使围绕枢轴92枢转,从而使摇杆95运动(如虚线所指示的)。如前所述,对摇杆95与测量轮臂54接合所处的位置进行调节限制了测量轮臂54的向上运动,这又限制了测量轮52的底部相对于开沟圆盘62的底部的向上行进,从而设置了开沟圆盘62进入土壤表面的穿透深度,进而设置了种子垄沟3的深度。
147.图36-38图示了深度调节组件90t的另一实施例。像之前的实施例90r、90s,存在包
括电动马达5030的致动器5050。电动马达5030可以是伺服马达、减速马达或步进马达。如果使用减速马达,则减速马达可以被齿轮减速以在不被供以动力以旋转时能有效地自锁。替代地,如果马达5030不是自锁的,则可以结合制动器以防止轴5034、线缆卷筒5050、蜗轮5032、齿轮5036或轴5038(均在后面讨论)的旋转。如在前面的实施例90r、90s中,该实施例中的致动器/马达5050/5030通过安装组件5000相对于框架14固定。安装组件5000可以包括马达安装件5004,马达安装件5004也用以将深度调节致动器90t固定到靠近深度调节槽97的行单元框架14(例如,通过未示出的螺栓),马达5030和齿轮箱5020由马达安装件5004支撑。
148.图37是图36的向后看的透视图,但是为了清楚起见,框架14、测量轮臂54和安装组件5000被移除。此外,齿轮箱外壳5006也被移除,以示出齿轮箱5020的内部齿轮的结构和布置。马达5030联接到蜗轮5032并驱动蜗轮5032,蜗轮5032包括围绕可旋转的轴5034的螺旋齿5033。螺旋齿5033与齿轮5036的凹口5035接合。齿轮5036旋转地固定到横向轴5038,并且横向轴5028旋转地固定到线缆卷筒或滑轮5040。一根或多根线缆5042(示出为两根)围绕线缆卷筒5040盘绕,线缆5042的自由端通过连杆5042联接到深度调节主体5044。深度调节主体5044通过枢轴92枢转地连接到行单元框架14。摇杆95枢转地附接到深度调节主体5044的下端。
149.图38是图36的侧视图,但是为了清楚起见,框架14、测量轮臂54、安装组件5000和齿轮箱外壳5006被移除。如图38中的虚线所图示的,蜗轮5032通过马达5030的旋转导致齿轮5036由于螺旋齿5033与齿轮5036的凹口5035的接合而旋转。齿轮5036的旋转导致轴5038旋转,这又使刚性地附接的线缆卷轴5040随轴5038的旋转而一起旋转,导致根据轴5038的旋转,线缆5042从线缆卷轴5040卷绕或展开。由于深度调节主体3044通过枢轴92枢转地附接到框架14,随着线缆5042从线缆卷轴5040卷绕或展开,深度调节主体5044围绕枢轴92枢转,从而使摇杆95运动(如虚线所指示的)。如前所述,对摇杆95与测量轮臂54接合所处的位置进行调节限制了测量轮臂54的向上运动,这又限制了测量轮52的底部相对于开沟圆盘62的底部的向上行进,从而设置了开沟圆盘62进入土壤表面的穿透深度,进而设置了种子垄沟3的深度。
150.图39-41图示了深度调节组件90u的另一实施例。像前述实施例90r、90s、90t,致动器6050包括电动马达6030。电动马达6030可以是伺服马达、减速马达或步进马达。如果使用减速马达,则减速马达可以被齿轮减速以在不被供以动力以旋转时能有效地自锁。替代地,如果马达6030不是自锁的,则可以结合制动器以防止蜗轮6032、齿轮6036或轴6038(均在后面讨论)的旋转。与前述实施例90r、90s、90t中一样,本实施例中的致动器/马达6050/6030通过安装组件6000相对于行单元框架14固定。安装组件6000可以包括一对安装板6002,该对安装板6002固定到行单元框架14的靠近深度调节槽97的侧面(例如,通过未示出的螺栓)。马达安装件6004刚性地附接到安装板6002,马达6030和齿轮箱6020由安装板6002支撑。
151.图40是图39的向后看的透视图,但是为了清楚起见,框架14、测量轮臂54、安装组件6000被移除。此外,齿轮箱外壳6006也被移除,以示出齿轮箱6020的内部齿轮的结构和布置。马达6030联接到蜗轮6032并驱动蜗轮6032,蜗轮6032包括围绕可旋转的轴6034的螺旋齿6033。螺旋齿6033与齿轮6036的凹口6035接合。齿轮6036旋转地固定到横向轴6038,并且
横向轴6038旋转地固定到u形接口6040。连杆6042将u形接口6040枢转地连接到深度调节主体6044。深度调节主体6044通过枢轴92枢转地连接到行单元框架14。
152.图41是图39的侧视图,但是为了清楚起见,框架14、测量轮臂54、安装组件6000和齿轮箱外壳6006被移除。如图41中的虚线所图示,蜗轮6032通过马达6030的旋转导致齿轮6036由于螺旋齿6033与齿轮6036的凹口6035的接合而旋转。齿轮6036的旋转导致轴6038旋转,这又使u形接口6040枢转。由于u形接口6040通过连杆6042连接到深度调节主体6044,深度调节主体6044被迫使围绕枢轴92枢转,从而使摇杆95运动(如虚线所指示的)。如前所述,对摇杆95与测量轮臂54接合所处的位置进行调节限制了测量轮臂54的向上运动,这又限制了测量轮52的底部相对于开沟圆盘62的底部的向上行进,从而设置了开沟圆盘62进入土壤表面的穿透深度,进而设置了种子垄沟3的深度。
153.关于深度调节组件实施例90r、90s、90t、90u中的每一种,绝对位置传感器可应用于相应的蜗轮3032、4032、5032、6032,或应用于相应的齿轮3036、4036、5036、6036(或应用于关于实施例90t的线缆卷筒5040)。一种这样的绝对位置传感器可以是感测非同心曲面的感应式传感器,使得相对距离随着非同心曲面的旋转而变化。感应式传感器7000的一种这样的实施例在图42-44中示出。
154.图42是致动器/马达3050/3030、4050/4030、5050/5030、6050/6030和齿轮箱3020、4020、5020、6020(诸如关于相应的深度调节组件90r、90s、90t、90u中的每一个所描述的)的透视图。图43是沿着图42的线43-43观察的致动器/马达和齿轮箱的剖视图,示出了感应式传感器7000的实施例。图44是为了清楚起见用虚线示出齿轮箱外壳3006、4006、5006、6006的侧视图。
155.感应式传感器7000利用非接触式感应感测来测量导电目标体的位置,商业上可获得的感应式传感器的示例是texas instruments提供的ldc131x或ldc 161x感应式传感器。在优选的实施例中,两个感应式传感器7002、7004固定到传感器板7006,传感器板7006延伸到齿轮箱外壳3006、4006、5006、6006中。感应式传感器7002、7004包括带有用于屏蔽的铁氧体背衬的卷铜。传感器板7006固定到齿轮箱外壳3006、4006、5006、6006的壁上,以确保感应式传感器7002、7004相对于其各自的目标体7008、7010的可重复且稳固的布置。第一感应式传感器7002相对于第一目标体7008设置在传感器板7006上,第一目标体7008固定到齿轮箱外壳3006、4006、5006、6006的固定壁或表面。因此,第一感应式传感器7002及其固定目标体7008用作参考传感器,以检测可能由于温度变化而发生的齿轮箱外壳的膨胀或收缩。由于齿轮箱外壳的膨胀或收缩而检测到的变化可用于校正第二感应式传感器7004的测量值。第二感应式传感器7004设置在传感器板7006上,与横向轴3038、4038、5038、6038的轴线成一直线,齿轮3036、4036、5036、6036旋转地固定到横向轴3038、4038、5038、6038。齿轮3036、4036、5036、6036包括凸轮7020,凸轮7020具有非同心或偏心曲面7022,产生用作第二感应式传感器7004的第二目标体7010的偏心轮廓。因此,应当理解,随着横向轴3038、4038、5038、6038由于齿轮3036、4036、5036、6036与通过马达3030、4030、5030、6030旋转的旋转蜗轮3032、4032、5032、6032的接合而发生旋转,第二感应式传感器7004与第二目标体7010的偏心轮廓之间的相对距离将变化。因此,第二目标体7010相对于固定的第二感应式传感器7004的相对位置的这种变化将对应于深度调节主体3044、4044、5044、6044的位置,并且因此对应于与开沟圆盘62的穿透深度相对应的测量轮臂54的位置。
156.应当理解,尽管为了考虑到齿轮箱外壳的膨胀或收缩以校正第二感应式传感器7004的测量值而优选使用参考传感器7002,但参考传感器7002可以被省略,使得感应式传感器7000仅利用一个感应式传感器。
157.可选地,在齿轮箱外壳3006、4006、5006、6006内提供前止动件7012、7014以与齿轮3036、4036、5036、6036接合,以防止齿轮在任一方向上旋转过远,使得齿轮3036、4036、5036、6036的凹口3035、4035、5035、6035保持与蜗轮3032、4032、5032、6032的螺旋齿3033、4033、5033、6033接合,并且防止偏心曲面7022接触第二感应式传感器7004。
158.凸轮7020可以可移除地附接到齿轮3036、4036、5036、6036,使得具有不同的偏心曲面轮廓7022的不同目标体7010可互换。通过提供可以互相交换的可互换的凸轮7020,深度调节组件90r、90s、90t、90u和感应式传感器7000可根据可能因行单元10的制造或型号而异的测量轮臂54、摇杆95或深度调节主体3044、4044、5044、6044的配置而修改,或者适应深度调节组件90r、90s、90t、90u的不同的应用或用途。举例来说,图45-47图示了用于将凸轮7020可移除地附接到齿轮3036、4036、5036、6036的一种实施例。
159.图45是示出附接至齿轮3036、4036、5036、6036的凸轮7020的放大透视图。图46是图45的分解透视图,示出了凸轮7020从齿轮移除。图47是凸轮7020的另一透视图,为了图示目的而旋转显示。如图46和47中最佳所示,在一种实施例中,齿轮3036、4036、5036、6036包括在齿轮的与凹口3035、4035、5035、6035相对的一侧上形成或加工的凸角7030。凸轮7020具有与凸角7030配合的内表面7024,并包括凸缘7026,凸缘7026具有与齿轮3036、4036、5036、6036的相应表面配合的边缘7028。凸缘7026包括与凸角7030中的内螺纹孔7034对准的孔口7032。螺纹连接器7036延伸穿过凸缘中的孔口7032并由凸角7030中的内螺纹孔7034通过螺纹方式接收,因此以确保将可互换的目标体7010一致且稳固地布置到齿轮的方式将凸轮7020刚性地但可移除地固定到齿轮3036、4036、5036、6036,以提供不同的偏心曲面轮廓7022。本领域技术人员将认识到并可以理解,存在用于将具有不同的偏心曲面轮廓7022的可互换的目标体7010可移除地紧固到齿轮3036、4036、5036、6036上的各种其他适当的方式,使得前述仅是一个非限制性示例。
160.另一绝对位置传感器可以是磁体和霍尔效应传感器的形式,由此随着一个相对于另一个旋转,检测磁场的变化。例如,可以将磁体附接到蜗轮3032、4032、5032、6032,其中霍尔效应传感器固定到固定部件,使得随着蜗轮上的磁体相对于霍尔效应传感器旋转,磁场的变化被检测,磁场的该变化与深度调节主体3044、4044、5044、6044的位置相关,并因此对应于垄沟3的深度。
161.此外,上述有关深度调节组件90p描述的校准过程和归位系统1970可针对深度调节组件实施例90r、90s、90t、90u中的每一种使用。但是,在实施例90r、90s、90t、90u中,因为致动器3050、4050、5050、6050不像实施例90p中那样相对于行单元框架14的齿轮轨道运动,所以包括归位系统1970的传感器1971和目标体1972将被布置以检测深度调节主体3044、4044、5044、6044相对于原位或零位的位置,原位或零位是相对于固定点的。例如,传感器1971可以安装在行单元框架14上,目标体1972将安装到围绕枢轴92枢转的深度调节主体3044、4044、5044、6044。
162.深度控制系统
163.本文公开的二次深度调节致动器/马达720、800、950、1000、1230、1450、1550、1650
和深度调节致动器/马达1650、1750/1730、1850/1830、1950/1930、1984、2050/2030、3050/3030、4050/4030、5050/5030、6050/6030可以与如图11中图示且在本文描述的深度控制和土壤监控系统300数据通信。
164.在深度控制和土壤监控系统300中,监控器50可以跟与每个行单元10相关联的部件电通信,所述部件包括排种驱动器315、种子传感器305、gps接收器53、下压力传感器392、下压力阀390、深度调节致动器380、和深度致动器编码器382(以及在一些实施例中,实际深度传感器385,诸如申请人的通过引用合并于此的国际专利公开no.wo2014/066654中描述的那些)。在一些实施例中,尤其是其中每个排种器30不由单独的驱动器315驱动的那些实施例中,监控器50还可以与被配置为选择性地将排种器30可操作地联接到驱动器315的离合器310电通信。
165.继续参考图11,监控器50与蜂窝式调制解调器330或配置为使监控器50与由附图标记335表示的互联网数据通信的其他部件电通信。经由互联网连接,监控器50接收来自土壤数据服务器345的数据。土壤数据服务器345可以包括将土壤类型(或其他土壤特征)与gps位置、rtk(实时运动学)数据层、海拔、或地形相关联的土壤映射文件(例如,shape文件)。在一些实施例中,土壤映射文件存储在监控器50的存储器中。
166.监控器50还可以与一个或多个温度传感器360电通信,温度传感器360安装到种植机并被配置为能够产生与正在由种植机行单元10耕作的土壤的温度相关的信号。在一些实施例中,一个或多个温度传感器360包括设置为接合土壤的热电偶(如申请人的国际专利公开no.wo2014/153157中所公开的,其公开内容通过引用整体并入本文)。在这样的实施例中,温度传感器360可以接合种沟38的底部处的土壤。在其他实施例中,一个或多个温度传感器360可以包括被布置且配置为在不接触土壤的情况下测量土壤的温度的传感器(如国际专利公开no.wo2012/149398中所公开的,其公开内容通过引用整体并入本文)。
167.参考图11,监控器50可以与一个或多个湿度传感器350电通信,湿度传感器350安装到种植机并且被配置为能够产生与正在由种植机行单元10耕作的土壤的温度相关的信号。在一些实施例中,湿度传感器350包括反射传感器(诸如美国专利no.8,204,689中所公开的,其公开内容通过引用整体并入本文)。在这样的实施例中,湿度传感器350可以安装到行单元10的柄部15并设置成测量种沟38的底部处的土壤湿度,优选为在种子管32的纵向前方位置处的土壤湿度。监控器50还可以与一个或多个第二深度湿度传感器352电通信。第二深度湿度传感器352可以包括反射传感器(诸如在先前引用的美国专利no.8,204,689中所公开的),其设置用于测量预期一致的湿度读数所在的深度处的土壤湿度。在一些实施例中,第二深度湿度传感器352设置用于测量比用于种植的深度深的深度处(诸如,在土壤表面以下3到6英寸之间,优选为大约4英寸)的土壤湿度。在其他实施例中,第二深度湿度传感器352可以设置用于测量比用于种植的深度浅的深度处(诸如,在土壤表面以下0.25到1英寸(0.64到2.54cm)之间,优选为约0.5英寸(1.3cm))的土壤湿度。第二深度湿度传感器352可以设置用于开出与由行单元10开出的种沟38侧向偏置的种沟。
168.参考图11,监控器50可以与一个或多个电导率传感器365电通信。电导率传感器365可以包括设置为切入土壤表面的一个或多个电极(诸如,美国专利no.5,841,282和no.5,524,560中公开的传感器,这两个专利的公开内容均通过引用整体并入本文)。
169.参考图11,监控器50还可以与一个或多个ph传感器355电通信。在一些实施例中,
ph传感器355由牵引机或由另一机具(例如,耕作工具)牵引,使得数据存储在监控器50中以供之后使用。在一些这样的实施例中,ph传感器355可以类似于美国专利no.6,356,830中公开的那些。在一些实施例中,ph传感器355安装到工具杆8,优选为安装在与行单元10侧向偏置的位置处。
170.深度控制方法
171.根据使用本文描述的深度调节组件控制深度的一些示例性过程,使用者可以手动调节主深度调节组件和/或二次深度调节组件。
172.根据一些示例性过程,使用者可以手动调节主深度调节组件,并且可以使用监视器50来命令对二次深度调节组件进行深度调节。
173.根据一些示例性过程,使用者可以手动调节主深度调节组件,并且监视器50可以通过从传感器(例如,传感器350、355、360、365、352、385)或者从土壤数据服务器345接收一个或多个农学变量来命令对二次深度调节组件(例如,致动器/马达720、800、950、1000、1230、1450、1550、1650之一)进行所需的深度调节,并通过查询使一个或多个农学变量与所需的垄沟深度相关的数据库或算法来确定所需的深度调节。
174.根据一些示例性过程,监控器50可以通过从传感器(例如,传感器350、355、360、365、352、385)或者从土壤数据服务器345接收一个或多个农学变量来命令对深度调节组件1650、1750、1850、1950、1984、2050、3050、4050、5050、6050进行所需的深度调节,并通过查询使一个或多个农学变量与所需的垄沟深度相关的数据库或算法来确定所需的深度调节。
175.根据一些示例性过程,监视器50可以通过确定gps报告的行单元10的位置并查询使田地中的位置和/或区域与所需的垄沟深度在空间上相关的深度方案映射来命令对深度调节组件1650、1750、1850、1950、1984、2050、3050、4050、5050、6050进行所需的深度调节。
176.深度方案基于将种子放置在适当的深度处以获得所需的发芽和出苗。用于确定适当深度的因素包括但不限于土壤类型、有机物质含量、湿度、土壤温度、土壤质地、地形、和海拔。深度方案可以基于田地中的当前温度和湿度条件以及天气预报预测的温度和湿度输送的组合。这个过程在美国专利公开no.2016/0037709中被描述,其通过引用并入本文。
177.在另一实施例中,由操作员设置的最小深度和最大深度可以被输入到监控器50中,以将所需的深度控制在操作员指定的范围内。操作员设置的最小深度可以大于深度调节组件可获得的实际最小深度,并且操作员设置的最大深度可以小于深度调节组件可获得的实际最大深度。这对于将深度限制在所需的深度范围是有用的。对于给定的种子类型,可以存在用于种植种子的所需的深度范围,使得种子可以发芽和出苗。当使用传感器基于田地中的测量条件(诸如,湿度、土壤温度、有机物质含量、土壤类型、或土壤质地)对深度进行调节时(诸如,美国专利公开no.us2016/0037709中所描述的),传感器可以发出深度变化的信号以到达具有所选土壤特性的深度,但在尝试改变深度以实现所选特性的同时,深度可能在所选范围之外。让操作员设置最小深度和最大深度使种子保持在所需的深度范围内。例如,操作员可能希望将玉米种子种植在1.75英寸和2.5英寸之间。如果传感器正在测量湿度,并且较浅的深度处湿度不足,则深度调节机构将接收信号以改变为较深的深度,但其可以被限制为保持在操作员选择的范围内。
178.在一些实施例中,监控器50可以通过使致动器/马达720、800、950、1000、1230、1450、1550、1650、1750/1730、1850/1830、1950/1930、1984、2050/2030、3050/3030、4050/
4030、5050/5030、6050/6030的命令的致动与由gps接收器52报告的gps位置相关联来记录田地中的深度的变化。在一些这样的实施例中,监控器50可以与致动器/马达720、800、950、1000、1230、1450、1550、1650、1750/1730、1850/1830、1950/1930、1984、2050/2030、3050/3030、4050/4030、5050/5030、6050/6030的命令的致动同时地记录深度的变化。然而,在操作中,摇杆95与测量轮臂和/或深度调节构件之间的力可以变化,例如,在行单元运动经过不平坦的地形时。因此,在一些实施例中,监控器50可以监控测量轮臂和/或深度调节摇杆上的力,并且仅当力低于预定的阈值时记录深度的变化。例如,关于图12的实施例,监控器50可以监控测量轮臂和/或深度调节摇杆上的力,并且仅当力低于针对致动器1230的给定位置可以推进深度调节构件的预定的阈值时记录深度的变化。测量轮臂和/或深度调节摇杆上的力可以通过安装到测量轮臂或传递力的其他位置的负载传感器(诸如,应变仪)或者通过如本领域中已知的结合在行单元中的负载感测针记录。
179.在其他执行方式中,监控器50可以与致动器/马达720、800、950、1000、1230、1450、1550、1650、1750/1730、1850/1830、1950/1930、1984、2050/2030、3050/3030、4050/4030、5050/5030、6050/6030的命令的扩展变化同时地(或之前或之后)命令由下压力致动器18施加的行单元下压力的临时变化(例如,减小),以允许深度调节。然后,监控器50可以命令由致动器18施加的行单元下压力返回到其先前命令的水平。
180.对本文所述的设备、系统和方法的实施例以及一般原理和特征的各种修改对于本领域技术人员而言将是显而易见的。因此,所附权利要求不应限于本文所述和附图中图示的设备、系统和方法的实施例,而应被赋予与其一般教导一致的最宽范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。