技术特征:
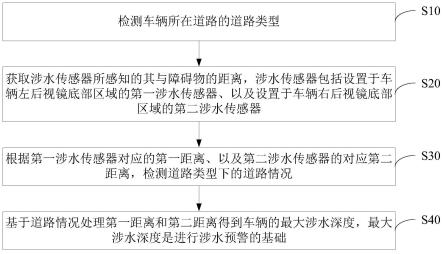
1.一种车辆涉水预警方法,其特征在于,所述方法包括:检测车辆所在道路的道路类型;获取涉水传感器所感知的其与障碍物的距离,所述涉水传感器包括设置于所述车辆左后视镜底部区域的第一涉水传感器、以及设置于所述车辆右后视镜底部区域的第二涉水传感器;根据所述第一涉水传感器对应的第一距离、以及所述第二涉水传感器的对应第二距离,检测所述道路类型下的道路情况;基于所述道路情况处理所述第一距离和所述第二距离得到所述车辆的最大涉水深度,所述最大涉水深度是进行涉水预警的基础。2.根据权利要求1所述的方法,其特征在于,所述道路类型为平直道路;相应的,所述根据所述第一涉水传感器对应的第一距离、以及所述第二涉水传感器的对应第二距离,检测所述道路类型下的道路情况,包括:按照如下公式计算所述平直道路下的第一距离差d1:d1=|d
1-d2|其中,d1为所述第一距离、d2为所述第二距离;在所述第一距离差小于预设的距离阈值的情况下,则确定道路正常;在所述第一距离差不小于预设的距离阈值的情况下,则确定道路异常;相应的,所述基于所述道路情况处理所述第一距离和所述第二距离得到所述车辆的最大涉水深度,包括:如果道路正常,按照如下公式计算所述最大涉水深度d
max
:d
max
=l-d1/2其中,l为预设的所述涉水传感器与所述车辆的支撑面的距离;如果道路异常,按照如下公式计算所述最大涉水深度d
max
:3.根据权利要求1所述的方法,其特征在于,所述道路类型为横向坡度道路;相应的,所述根据所述第一涉水传感器对应的第一距离、以及所述第二涉水传感器的对应第二距离,检测所述道路类型下的道路情况,包括:按照如下公式计算所述横向坡度道路下的第二距离差d2:d2=|d1/cosα-d2/cosα|-l1×
tanα其中,d1为所述第一距离、d2为所述第二距离、α为所述道路的横向坡度、l1为所述第一涉水传感器与所述第二涉水传感器间的横向距离;在所述第二距离差小于预设的距离阈值的情况下,则确定道路正常;在所述第二距离差不小于预设的距离阈值的情况下,则确定道路异常;相应的,所述基于所述道路情况处理所述第一距离和所述第二距离得到所述车辆的最大涉水深度,包括:如果道路正常,按照如下公式计算所述最大涉水深度d
max
:d
max
=l-d1/cosα
其中,l为预设的所述涉水传感器与所述车辆的支撑面的距离;如果道路异常,按照如下公式计算所述最大涉水深度d
max
:4.根据权利要求1所述的方法,其特征在于,所述道路类型为纵向坡度道路;相应的,所述根据所述第一涉水传感器对应的第一距离、以及所述第二涉水传感器的对应第二距离,检测所述道路类型下的道路情况,包括:按照如下公式计算所述纵向坡度道路下的第三距离差d3:d3=|d1/cosβ-d2/cosβ|其中,d1为所述第一距离、d2为所述第二距离、β为所述道路的纵向坡度;在所述第三距离差小于预设的距离阈值的情况下,则确定道路正常;在所述第三距离差不小于预设的距离阈值的情况下,则确定道路异常;相应的,所述基于所述道路情况处理所述第一距离和所述第二距离得到所述车辆的最大涉水深度,包括:如果道路正常,按照如下公式计算所述最大涉水深度d
max
:其中,l为预设的所述涉水传感器与所述车辆的支撑面的距离、l
front
为所述涉水传感器与所述车辆的车头间的距离、l
rear
为所述涉水传感器与所述车辆的车尾间的距离;如果道路异常,按照如下公式计算所述最大涉水深度d
max
:5.根据权利要求1所述的方法,其特征在于,所述道路类型为混合坡度道路;相应的,所述根据所述第一涉水传感器对应的第一距离、以及所述第二涉水传感器的对应第二距离,检测所述道路类型下的道路情况,包括:按照如下公式计算所述纵向坡度道路下的第四距离差d4:d4=|d1/cosα-d2/cosα|-l1×
tanα |d1/cosβ-d2/cosβ|其中,d1为所述第一距离、d2为所述第二距离、α为所述道路的横向坡度、β为所述道路的纵向坡度;在所述第四距离差小于预设的距离阈值的情况下,则确定道路正常;在所述第四距离差不小于预设的距离阈值的情况下,则确定道路异常;相应的,所述基于所述道路情况处理所述第一距离和所述第二距离得到所述车辆的最大涉水深度,包括:如果道路正常,按照如下公式计算所述最大涉水深度d
max
:
其中,l为预设的所述涉水传感器与所述车辆的支撑面的距离、l
front
为所述涉水传感器与所述车辆的车头间的距离、l
rear
为所述涉水传感器与所述车辆的车尾间的距离;如果道路异常,按照如下公式计算所述最大涉水深度d
max
:其中,l1为所述第一涉水传感器与所述第二涉水传感器间的横向距离。6.根据权利要求1所述的方法,其特征在于,所述方法还包括:基于所述最大涉水深度显示所述车辆的车身侧视图,所述车身侧视图中标注有预设的警戒水位线。7.根据权利要求6所述的方法,其特征在于,所述方法还包括:通过对比所述最大涉水深度和所述警戒水位线的深度,确定所述车辆的涉水风险等级;基于所述涉水风险等级进行图标预警和/或语音预警。8.一种车辆涉水预警装置,其特征在于,所述装置包括:第一检测模块,用于检测车辆所在道路的道路类型;获取模块,用于获取涉水传感器所感知的其与障碍物的距离,所述涉水传感器包括设置于所述车辆左后视镜底部区域的第一涉水传感器、以及设置于所述车辆右后视镜底部区域的第二涉水传感器;第二检测模块,用于根据所述第一涉水传感器对应的第一距离、以及所述第二涉水传感器的对应第二距离,检测所述道路类型下的道路情况;计算模块,用于基于所述道路情况处理所述第一距离和所述第二距离得到所述车辆的最大涉水深度,所述最大涉水深度是进行涉水预警的基础。9.一种车辆涉水预警系统,其特征在于,所述系统包括:涉水传感器、涉水传感器主机和车载娱乐主机,所述涉水传感器包括设置于车辆左后视镜底部区域的第一涉水传感器、以及设置于所述车辆右后视镜底部区域的第二涉水传感器;所述第一涉水传感器,用于感知其与所述车辆左后视镜下方障碍物的第一距离;所述第二涉水传感器,用于感知其与所述车辆右后视镜下方障碍物的第二距离;所述涉水传感器主机,用于将所述第一距离和所述第二距离发送至所述车载娱乐主机;所述车载娱乐主机,用于检测车辆所在道路的道路类型;获取所述第一距离和所述第二距离;根据所述第一涉水传感器对应的第一距离、以及所述第二涉水传感器的对应第二
距离,检测所述道路类型下的道路情况;基于所述道路情况处理所述第一距离和所述第二距离得到所述车辆的最大涉水深度,所述最大涉水深度是进行涉水预警的基础。10.根据权利要求9所述的系统,其特征在于,所述车载娱乐主机,还用于:基于所述最大涉水深度显示所述车辆的车身侧视图,所述车身侧视图中标注有预设的警戒水位线。
技术总结
本发明提供一种车辆涉水预警方法、装置及系统,该方法包括:检测车辆所在道路的道路类型;获取涉水传感器所感知的其与障碍物的距离;根据第一涉水传感器对应的第一距离、以及第二涉水传感器的对应第二距离,检测道路类型下的道路情况;基于道路情况处理第一距离和所述第二距离得到车辆的最大涉水深度,最大涉水深度是进行涉水预警的基础。本发明能够实时监测车辆在不同道路类型、不同道路情况下涉水行驶时的最大涉水深度,从而能够基于该最大涉水深度给车内人员做出预警,避免因未知涉水深度强制启动发动机导致发送机熄火、电器部件受损等危险情况,保证车内人员的生命安全。保证车内人员的生命安全。保证车内人员的生命安全。
技术研发人员:周莉 谢建刚 杜剑伟 蔡如意 黄思慧
受保护的技术使用者:上海汽车集团股份有限公司
技术研发日:2020.12.04
技术公布日:2022/6/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。