使用用于流体注入器设备的基于压力的电机控制来递送流体的系统和方法
1.相关申请的交叉引用
2.本技术要求2019年11月21日提交的美国临时申请no.62/938,379的优先权,其公开内容通过引用整体并入本文。
技术领域
3.本公开总体上涉及用于在流体注入过程期间使用流体注入器的一个或多个驱动部件的实时、基于压力的控制来改善流体递送的系统、设备、产品、装置和方法。
背景技术:
4.在许多医疗诊断和治疗过程中,医疗从业者(内科医师或放射科医师)使用动力流体注入器系统向患者注入一种或多种流体。已经开发了许多用于流体的加压注入的动力流体注入器系统,用于诸如血管造影术、计算机断层扫描(ct)、分子成像(例如pet成像)和磁共振成像(mri)的过程中。
5.递送给患者的流体的实际流率(或递送体积)旨在尽可能接近编程的流率(或期望体积)。然而,由于流体递送系统的整体阻抗(impedance)、顺应性(compliance)和容度(capacitance),流体递送系统的实际性能是许多因素的函数,例如流体路径部件的压力引起的膨胀和系统内的机械松弛。在某些递送过程中,流体递送系统的阻抗、顺应性和容度可能导致编程的流率(或期望体积)的流体流率过高或过低(或体积递送过多或过少)。此外,在具有不同流体性质(例如,粘度、密度、体积模量)的两种或多种流体之间存在固有的相互作用,这可能导致流出注入器的流率与注入器设定的流率相比出现异常。这些各种相互作用的组合不容易被建模成流体递送系统的顺应性的表征。
6.现有注入器系统和方案未能解决由系统阻抗、顺应性和/或容度导致的流体递送过少或递送过多。结果,可能会出现低于最佳的注入团剂(bolus)和/或流体递送过程可能会导致相对大量的流体浪费和/或对患者的流体递送过少。因此,在本领域中需要在使用流体注入设备的流体注入过程期间改善流体递送曲线,以便获得最佳的流体递送。
技术实现要素:
7.因此,提供了用于流体注入器系统的系统、设备、产品、装置和/或方法,该流体注入器系统通过响应注入储器内流体压力的改变实时控制流体注入器电机来改善流体递送。由于造影剂递送的准确性,本公开的实施例允许改善造影剂递送的剂量效率和减少造影剂体积的情况下的相似成像质量。
8.根据非限制性实施例,流体注入器系统用于向患者给药至少一种流体。流体注入器系统可以包括存储器,用于在其中存储在使用流体注入器执行流体递送过程期间要递送的编程的流率和编程的流率的最大可允许偏差。流体注入器还可以包括至少一个传感器,用于测量至少一种流体的压力,其中压力由流体注入器的至少一个驱动部件在执行流体递
送过程期间生成。流体注入器还可以包括控制设备,该控制设备与流体注入器的至少一个驱动部件可操作地相关联,该控制设备包括至少一个处理器,该至少一个处理器被编程或配置成执行操作。根据实施例,至少一个传感器可以通过至少一个驱动部件的电机上的应变来测量压力,例如通过测量电机的电流。该操作可以包括:基于在指定时间间隔内由至少一个传感器测量的压力改变,确定在流体递送过程的指定时间间隔期间的实际流率,确定在指定时间间隔内实际流率与编程的流率的偏差,和基于编程的流率和在指定时间间隔内实际流率与编程的流率的偏差,计算指定时间间隔之后的后续时间间隔的新的编程的流率。
9.根据一些非限制性实施例,包括至少一个处理器的控制设备可以被进一步编程或配置为执行包括以下的操作:将最大可允许偏差与指定时间间隔内实际流率与编程的流率的偏差进行比较,以确定流率校正,并基于编程的流率和流率校正计算后续时间间隔的新的编程的流率。
10.根据一些非限制性实施例,实际流率与编程的流率的偏差可以受预定边界的限制。根据一些非限制性实施例,如果实际流率与编程的流率的偏差大于最大可允许偏差,则流率校正可以等于最大可允许偏差。根据一些非限制性实施例,实际流率与编程的流率的偏差和最大可允许偏差之间的差可以被存储为缓冲偏差,用于在第二时间间隔之后的一个或多个后续时间间隔中确定新的流率校正。根据一些非限制性实施例,如果实际流率与编程的流率的偏差小于或等于最大可允许偏差,则流率校正可以等于实际流率。
11.根据一些非限制性实施例,其中控制设备被配置成使用机器学习模型,机器学习模型被设计成接收与流体注入过程相关联的数据作为输入,并提供指令作为输出,以驱动一个或多个驱动部件,从而以编程的流率递送期望体积的流体。
12.根据一些非限制性实施例,确定指定时间间隔期间的实际流率的操作可以包括在指定时间间隔开始时使用至少一个传感器测量第一压力,并且在指定时间间隔结束时使用至少一个传感器测量第二压力,并将第一压力和第二压力转换成对应于指定时间间隔期间的实际流率的压力改变。
13.根据一些非限制性实施例,压力改变可以基于第二压力和第一压力之间的差,以及由流体注入器的一个或多个特征确定的至少一个缩放因子。
14.根据一些非限制性实施例,至少一个传感器可以是力传感器,其用于测量至少一个驱动部件的力输出。根据一些非限制性实施例,至少一个传感器可以是与流体注入器的流体储器或流体路径部件相关联的压力传感器。根据某些非限制性实施例,至少一个传感器可以是测量与至少一个驱动部件相关联的电机电流的电流传感器。
15.根据一些非限制性实施例,每个后续时间间隔的流率校正可以基于最大可允许偏差和每个后续时间间隔内实际流率与新的编程的流率的偏差之间的差、以及来自至少一个先前时间间隔的缓冲偏差。
16.根据一些非限制性实施例,由控制设备执行的操作还可以包括对流体注入过程中的每个后续时间间隔重复步骤(a)-(c)的操作,其中,新的编程的流率用作编程的流率。根据一些非限制性实施例,由控制设备执行的操作还可以包括在后续时间间隔中以新的编程的流率递送流体。
17.根据一些非限制性实施例,用于监控流体注入器系统的性能的计算机实现的方
法,流体注入器系统用于向患者给药至少一种流体,该方法包括:(a)在存储器设备中存储在使用流体注入器的流体递送过程期间要递送的流体的编程的流率和编程的流率的最大可允许偏差;(b)使用至少一个传感器测量在执行流体递送过程期间由流体注入器的至少一个驱动部件生成的至少一种流体的压力;(c)用包括至少一个处理器的控制设备,基于由至少一个传感器在指定时间间隔内测量的压力改变,确定在流体递送过程的指定时间间隔期间的实际流率;(d)用控制设备确定在指定时间间隔内实际流率与编程的流率的偏差;(e)利用控制设备,基于编程的流率和在指定时间间隔内实际流率与编程的流率的偏差,为指定时间间隔之后的至少一个后续时间间隔计算新的编程的流率。
18.根据一些非限制性实施例,该方法还可包括用控制设备将最大可允许偏差与在指定时间间隔内实际流率与编程的流率的偏差进行比较,以确定流率校正,并基于编程的流率和流率校正计算后续时间间隔的新的编程的流率。
19.根据一些非限制性实施例,该方法还可包括对流体注入过程中的每个后续时间间隔重复步骤(c)-(e),其中,新的编程的流率用作编程的流率。根据一些非限制性实施例,该方法还可包括在后续时间间隔中以新的编程的流率递送流体。
20.根据一些非限制性实施例,提供了用于控制流体注入器系统的操作的计算机程序产品,该流体注入器系统用于向患者给药至少一种流体。该计算机程序产品可以包括至少一个非暂时性计算机可读介质,至少一个非暂时性计算机可读介质具有一个或多个指令,该一个或多个指令在由至少一个处理器执行时使得至少一个处理器:基于在流体递送过程期间由流体注入器的至少一个驱动部件生成并由至少一个传感器在指定时间间隔内测量的压力改变,确定在流体递送过程的指定时间间隔期间的流体的实际流率;用与流体注入器的至少一个驱动部件可操作地相关联的控制设备,确定在指定时间间隔内实际流率与编程的流率的偏差;和基于编程的流率和在指定时间间隔内实际流率与编程的流率的偏差,为指定时间间隔之后的后续时间间隔计算新的编程的流率。
21.根据一些非限制性实施例,计算机程序产品还可包括一个或多个指令,一个或多个指令在由至少一个处理器执行时使至少一个处理器:用控制设备将最大可允许偏差与在指定时间间隔内实际流率与编程的流率的偏差进行比较,以确定流率校正,并且用控制设备,基于编程的流率和流率校正计算指定时间间隔之后的后续时间间隔的新的编程的流率。
22.根据一些非限制性实施例,计算机程序产品还可包括对流体注入过程中的每个后续时间间隔重复步骤(a)-(c),其中,新的编程的流率用作编程的流率。根据一些非限制性实施例,计算机程序产品还可包括在后续时间间隔中以新的编程的流率递送流体。
23.本公开的其他实施例的特征在于以下条款中的一个或多个:
24.条款1.流体注入器系统,其被配置为用于向患者给药至少一种流体,流体注入器系统包括:存储器,用于在其中存储在使用流体注入器执行流体递送过程期间要递送的编程的流率和编程的流率的最大可允许偏差;至少一个传感器,被配置为用于测量至少一种流体的压力,其中压力由流体注入器的至少一个驱动部件在执行流体递送过程期间生成;和控制设备,与流体注入器的至少一个驱动部件可操作地相关联,控制设备包括至少一个处理器,至少一个处理器被编程或配置成执行操作,操作包括:基于在指定时间间隔内由至少一个传感器测量的压力改变,确定在流体递送过程的指定时间间隔期间的实际流率;确
定在指定时间间隔内实际流率与编程的流率的偏差;和基于编程的流率和在指定时间间隔内实际流率与编程的流率的偏差,计算指定时间间隔之后的后续时间间隔的新的编程的流率。
25.条款2.根据条款1的流体注入器系统,其中包括至少一个处理器的控制设备被进一步编程或配置为执行包括以下的操作:将最大可允许偏差与指定时间间隔内实际流率与编程的流率的偏差进行比较,以确定流率校正,并基于编程的流率和流率校正计算后续时间间隔的新的编程的流率。
26.条款3.根据条款1或2的流体注入器系统,其中,实际流率与编程的流率的偏差受预定边界的限制。
27.条款4.根据条款2或条款3的流体注入器系统,其中,如果实际流率与编程的流率的偏差大于最大可允许偏差,则流率校正等于最大可允许偏差。
28.条款5.根据条款4的流体注入器系统,其中,实际流率与编程的流率的偏差和最大可允许偏差之间的差被存储为缓冲偏差,用于在第二时间间隔之后的一个或多个后续时间间隔中确定新的流率校正。
29.条款6.根据条款2-5中任一项的流体注入器系统,其中,如果实际流率与编程的流率的偏差小于或等于最大可允许偏差,则流率校正等于实际流率。
30.条款7.根据条款2-6中任一项的流体注入器系统,其中,控制设备被配置成使用机器学习模型,机器学习模型被设计成接收与流体注入过程相关联的数据作为输入,并提供指令作为输出,以驱动一个或多个驱动部件,从而以编程的流率递送期望体积的流体。
31.条款8.根据条款1-7中任一项的流体注入器系统,其中,确定指定时间间隔期间的实际流率的操作包括在指定时间间隔开始时使用至少一个传感器测量第一压力,并且在指定时间间隔结束时使用至少一个传感器测量第二压力,并将第一压力和第二压力转换成对应于指定时间间隔期间的实际流率的压力改变。
32.条款9.根据条款8的流体注入器系统,其中,压力改变基于第二压力和第一压力之间的差,以及由流体注入器的一个或多个特征确定的至少一个缩放因子。
33.条款10.根据条款1-9中任一项的流体注入器系统,其中,至少一个传感器是力传感器,其被配置为用于测量至少一个驱动部件的力输出。
34.条款11.根据条款1-9中任一项的流体注入器系统,其中,至少一个传感器是与流体注入器的流体储器或流体路径部件相关联的压力传感器。
35.条款12.根据条款2-11中任一项的流体注入器系统,其中,每个后续时间间隔的流率校正基于最大可允许偏差和每个后续时间间隔内实际流率与新的编程的流率的偏差之间的差、以及来自至少一个先前时间间隔的缓冲偏差。
36.条款13.根据条款1-12中任一项的流体注入器系统,其中,由控制设备执行的操作还包括对流体注入过程中的每个后续时间间隔重复步骤(a)-(c)的操作,其中,新的编程的流率用作编程的流率。
37.条款14.根据条款1-13中任一项的流体注入器系统,其中,由控制设备执行的操作还包括在后续时间间隔中以新的编程的流率递送流体。
38.条款15.用于监控流体注入器系统的性能的计算机实现的方法,流体注入器系统被配置成向患者给药至少一种流体,方法包括:(a)在存储器设备中存储在使用流体注入器
的流体递送过程期间要递送的流体的编程的流率和编程的流率的最大可允许偏差;(b)使用至少一个传感器测量在执行流体递送过程期间由流体注入器的至少一个驱动部件生成的至少一种流体的压力;(c)用包括至少一个处理器的控制设备,基于由至少一个传感器在指定时间间隔内测量的压力改变,确定在流体递送过程的指定时间间隔期间的实际流率;(d)用控制设备确定在指定时间间隔内实际流率与编程的流率的偏差;(e)利用控制设备,基于编程的流率和在指定时间间隔内实际流率与编程的流率的偏差,为指定时间间隔之后的后续时间间隔计算新的编程的流率。
39.条款16.根据条款15的计算机实现的方法,还包括用控制设备将最大可允许偏差与在指定时间间隔内实际流率与编程的流率的偏差进行比较,以确定流率校正,并基于编程的流率和流率校正计算后续时间间隔的新的编程的流率。
40.条款17.根据条款15或16的计算机实现的方法,其中,实际流率与编程的流率的偏差受到预定边界的限制。
41.条款18.根据条款16或17的计算机实现的方法,其中,如果实际流率与编程的流率的偏差大于最大可允许偏差,则流率校正等于最大可允许偏差。
42.条款19.根据条款18的计算机实现的方法,其中,实际流率与编程的流率的偏差和最大可允许偏差之间的差被存储为缓冲偏差,用于在第二时间间隔之后的一个或多个后续时间间隔中确定新的流率校正。
43.条款20.根据条款16-19中任一项的计算机实现的方法,其中,如果实际流率与编程的流率的偏差小于或等于最大可允许偏差,则流率校正等于实际流率。
44.条款21.根据条款16-20中任一项的计算机实现的方法,其中,控制设备被配置成使用机器学习模型,机器学习模型被设计成接收与流体注入过程相关联的数据作为输入,并提供指令作为输出,以驱动一个或多个驱动部件,从而以编程的流率递送期望体积的流体。
45.条款22.根据条款15-21中任一项的计算机实现的方法,其中,确定指定时间间隔期间的实际流率包括在指定时间间隔开始时使用至少一个传感器测量第一压力,并且在指定时间间隔结束时使用至少一个传感器测量第二压力,并将第一压力和第二压力转换成对应于指定时间间隔期间的实际流率的压力改变。
46.条款23.根据条款22的计算机实现的方法,其中,压力改变基于第二压力和第一压力之间的差,以及由流体注入器的一个或多个特征确定的至少一个缩放因子。
47.条款24.根据条款15-23中任一项的计算机实现的方法,其中,至少一个传感器是力传感器,其被配置为用于测量至少一个驱动部件的力输出。
48.条款25.根据条款15-23中任一项的计算机实现的方法,其中,至少一个传感器是与流体注入器的流体储器或流体路径部件相关联的压力传感器。
49.条款26.根据条款15-25中任一项的计算机实现的方法,其中,每个后续时间间隔的流率校正基于最大可允许偏差和每个后续时间间隔内实际流率与新的编程的流率的偏差之间的差、以及来自至少一个先前时间间隔的缓冲偏差。
50.条款27.根据条款15-26中任一项的计算机实现的方法,还包括对流体注入过程中的每个后续时间间隔重复步骤(c)-(e),其中,新的编程的流率用作编程的流率。
51.条款28.根据条款15-27中任一项的计算机实现的方法,还包括在后续时间间隔中
以新的编程的流率递送流体。
52.条款29.用于控制流体注入器系统的操作的计算机程序产品,流体注入器系统被配置为向患者给药至少一种流体,计算机程序产品包括至少一个非暂时性计算机可读介质,至少一个非暂时性计算机可读介质包括一个或多个指令,一个或多个指令在由至少一个处理器执行时使得至少一个处理器:基于在流体递送过程期间由流体注入器的至少一个驱动部件生成并由至少一个传感器在指定时间间隔内测量的压力改变,确定在流体递送过程的指定时间间隔期间的流体的实际流率;用与流体注入器的至少一个驱动部件可操作地相关联的控制设备,确定在指定时间间隔内实际流率与编程的流率的偏差;和用控制设备,基于编程的流率和在指定时间间隔内实际流率与编程的流率的偏差,为指定时间间隔之后的后续时间间隔计算新的编程的流率。
53.条款30.根据条款29的计算机程序产品,还包括一个或多个指令,一个或多个指令在由至少一个处理器执行时使至少一个处理器:用控制设备将最大可允许偏差与在指定时间间隔内实际流率与编程的流率的偏差进行比较,以确定流率校正,并且用控制设备,基于编程的流率和流率校正计算指定时间间隔之后的后续时间间隔的新的编程的流率。
54.条款31.根据条款29或30的计算机程序产品,其中,实际流率与编程的流率的偏差受到预定边界的限制。
55.条款32.根据条款30或31的计算机程序产品,其中,如果实际流率与编程的流率的偏差大于最大可允许偏差,则流率校正等于最大可允许偏差。
56.条款33.根据条款32的计算机程序产品,其中,实际流率与编程的流率的偏差和最大可允许偏差之间的差被存储为缓冲偏差,用于在第二时间间隔之后的一个或多个后续时间间隔中确定新的流率校正。
57.条款34.根据条款30-33中任一项的计算机程序产品,其中,如果实际流率与编程的流率的偏差小于或等于最大可允许偏差,则流率校正等于实际流率。
58.条款35.根据条款29-34中任一项的计算机程序产品,其中,控制设备被配置成使用机器学习模型,机器学习模型被设计成接收与流体注入过程相关联的数据作为输入,并提供指令作为输出,以驱动一个或多个驱动部件,从而以编程的流率递送期望体积的流体。
59.条款36.根据条款29-35中任一项的计算机程序产品,其中,确定指定时间间隔期间的实际流率包括在指定时间间隔开始时使用至少一个传感器测量第一压力,并且在指定时间间隔结束时使用至少一个传感器测量第二压力,并将第一压力和第二压力转换成对应于指定时间间隔期间的实际流率的压力改变。
60.条款37.根据条款36的计算机程序产品,其中,压力改变基于第二压力和第一压力之间的差,以及由流体注入器的一个或多个特征确定的至少一个缩放因子。
61.条款38.根据条款29-37中任一项的计算机程序产品,其中,至少一个传感器是力传感器,其被配置为用于测量至少一个驱动部件的力输出。
62.条款39.根据条款29-37中任一项的计算机程序产品,其中,至少一个传感器是与流体注入器的流体储器或流体路径部件相关联的压力传感器。
63.条款40.根据条款30-39中任一项的计算机程序产品,其中,每个后续时间间隔的流率校正基于最大可允许偏差和每个后续时间间隔内实际流率与新的编程的流率的偏差之间的差、以及来自至少一个先前时间间隔的缓冲偏差。
64.条款41.根据条款29-40中任一项的计算机程序产品,还包括对流体注入过程中的每个后续时间间隔重复步骤(a)-(c),其中,新的编程的流率用作编程的流率。
65.条款42.根据条款29-41中任一项的计算机程序产品,还包括在后续时间间隔中以新的编程的流率递送流体。
66.在参考附图考虑以下描述及所附权利要求书(所有这些形成此说明书的一部分)之后,本公开的这些及其他特征及特性以及相关结构元件及零件组合的操作方法及功能及制造经济性将变得更显而易见,其中相同的附图标记表示各图中的对应零件。
附图说明
67.下面参考附图中所示的示例性实施例更详细地解释本公开的其他优点和细节,其中:
68.图1是根据本公开的一个示例的流体注入器系统的透视图;
69.图2是与图1的流体注入器系统一起使用的多次使用可弃式套件的透视图;
70.图3是根据本公开的另一示例的流体注入器系统的透视图;
71.图4是根据本公开的示例的流体注入器系统的电子控制系统的示意图;
72.图5显示了使用常规注入器技术的典型注入曲线,该典型注入曲线与使用本公开的基于压力的伺服控制的实施例的注入曲线进行了比较;和
73.图6是显示在流体注入方案的预定时间间隔内作为压力改变的函数的流率改变的图;
74.图7是显示在流体注入方案的预定时间间隔内作为压力改变的函数的多个实际流率改变的图;
75.图8是根据本公开的一些非限制性实施例的流量控制过程的代表性流程图;
76.图9a是显示根据第一示例的次优边界函数的作为时间函数的流率改变的图;
77.图9b是图9a所示的次优边界函数的作为时间函数的误差缓冲(单位:毫升)的图;
78.图10a是显示根据第二个示例的次优边界函数的作为时间函数的流率改变的图;
79.图10b是图10a所示的次优边界函数的作为时间函数的误差缓冲(单位:毫升)的图;
80.图11a是显示根据第一示例的不可接受的边界函数的作为时间函数的流率改变的图;
81.图11b是图11a所示的不可接受的边界函数的作为时间函数的误差缓冲(单位:毫升)的图;
82.图12a是显示根据第二示例的不可接受的边界函数的作为时间函数的流率改变的图;
83.图12b是图12a所示的不可接受的边界函数的作为时间函数的误差缓冲(单位:毫升)的图;
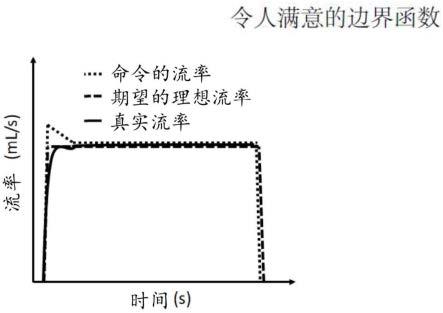
84.图13a是显示根据本公开的一些非限制性实施例的令人满意的边界函数的作为时间函数的流率改变的图;
85.图13b是图13a所示的令人满意的边界函数的作为时间函数的误差缓冲(单位:毫升)的图;
86.图14a是根据本公开的一些非限制性实施例的在用于压力优化的机器学习中使用的作为时间函数的多条压力曲线的图;
87.图14b是根据本公开的一些非限制性实施例的在用于流量优化的机器学习中使用的作为时间函数的多条流量曲线的图;
88.图15是根据本公开的一些非限制性实施例的压力控制系统的示意图;和
89.图16是根据本公开的一些非限制性实施例的流量控制过程的代表性流程图;
90.在图1至图16中,除非另有说明,否则根据具体情况,相同的字符指代相同的部件和元件。
91.然而,应明确理解的是,附图仅用于说明和描述的目的,并不用于限定本公开的范围。
具体实施方式
92.出于下文描述的目的,术语“上”、“下”、“右”、“左”、“垂直”、“水平”、“顶”、“底”、“横”、“纵”及其衍生词应与本公开在附图中的含义有关。当相对于多患者可弃式套件的注射器使用时,术语“近”指的是注射器中最靠近用于从注射器递送流体的活塞的部分。如“左”、“右”、“内”、“外”、“上”、“下”等的空间或方向术语不应视为限制,因为本发明可采取各种替代取向。
93.在所有情况下,在说明书和权利要求书中使用的所有数字应理解为被术语“约”修饰。术语“近似”、“约”和“实质上”是指所述值的正负百分之十的范围。
94.如本文所用,术语“至少一个”与“一个或多个”同义。例如,短语“a、b和c中的至少一个”是指a、b和c中的任意一个,或者a、b和c中的任意两个或更多个的任意组合。例如,“a、b和c中的至少一个”包含一个或多个单独的a;或者一个或多个单独的b;或者一个或多个单独的c;或者一个或多个a和一个或多个b;或者一个或多个a和一个或多个c;或者一个或多个b和一个或多个c;或者一个或多个全部的a、b和c。类似地,如本文所用,术语“至少两个”与“两个或更多个”同义。例如,短语“d、e和f中的至少两个”表示d、e和f中的任意两个或多个的任意组合。例如,“d、e和f中的至少两个”包含一个或多个d和一个或多个e;或者一个或多个d和一个或多个f;或者一个或多个e和一个或多个f;或者一个或多个全部d、e和f。
95.还应当理解,附图中示出的以及在以下说明书中描述的具体设备和过程仅是本公开的示例性示例。因此,与本文公开的示例有关的特定尺寸和其他物理特性不应被认为是限制性的。在本文档中,“示例性”一词在此用于表示“作为示例、实例或说明”。在此描述为“示例性”的本主题的任何实施例或实现方式不必被解释为优于其他实施例。
96.术语“第一”、“第二”等,或a)、b)、c)等并非旨在指代任何特定的顺序或时序,而是指不同的条件、性质或元素。术语“至少”与“大于或等于”同义。各种描述的操作可以以不同的顺序执行、修改或删除。此外,可以将步骤添加到所描述的方法并且仍然符合所描述的实施例。此外,这里描述的操作可以顺序发生,或者某些操作可以并行处理。
97.当相对于流体储器(如注入器或多注射器可弃式套件)使用时,术语“远”是指流体储器中最靠近患者的部分。当相对于流体储器(如注入器或多注射器可弃式套件)使用时,术语“近”指的是流体储器中最靠近注入器系统的部分。
98.如本文所使用,术语“通信”和“传达”可指信息(例如,数据、信号、消息、指令、命令
等)的接收、接纳、传输、传送、提供等。一个单元(例如,设备、系统、设备或系统的部件、其组合等)与另一单元通信意指该一个单元能够直接或间接地从该另一单元接收信息和/或向该另一单元传输信息。这可指在本质上有线和/或无线的直接或间接连接。另外,即使传输的信息可能在第一单元与第二单元之间被修改、处理、中继和/或路由,这两个单元也可彼此通信。例如,即使第一单元被动地接收信息且不会主动地将信息传输给第二单元,第一单元也可与第二单元通信。作为另一示例,如果至少一个中间单元(例如,位于第一单元与第二单元之间的第三单元)处理从第一单元接收的信息并将处理后的信息传达给第二单元,则第一单元可与第二单元通信。在某些实施例中,消息可指包含数据的网络分组(例如,数据分组等)。应当理解,许多其他布置是可能的。
99.如本文所用,术语“服务器”可指一个或多个计算设备,如处理器、存储设备、和/或通过网络(如互联网或专用网络)与客户端设备和/或其他计算设备通信并且在某些示例中促进其他服务器和/或客户端设备之间的通信的类似计算机部件。应当理解,各种其他布置是可能的。如此处所使用的,术语“系统”可以指一个或多个计算设备或计算设备(例如但不限于处理器、服务器、客户端设备、软件应用和/或其他类似部件)的组合。此外,如本文所使用的,对“服务器”或“处理器”的提及可指先前所述的陈述为执行先前步骤或功能的服务器和/或处理器、不同的服务器和/或处理器,和/或服务器和/或处理器的组合。例如,如在说明书和权利要求书中所用,陈述为执行第一步骤或功能的第一服务器和/或第一处理器可指陈述为执行第二步骤或功能的相同或不同服务器和/或处理器。
100.术语“包括”、“包括有”或其任何其他变型旨在涵盖非排他性的包括,使得包括所列部件或步骤的设置、设备或方法不仅包含那些部件或步骤,而且可以包含没有明确列出或者这样的设置或设备或方法固有的其他部件或步骤。换句话说,以“包括
…
一”开始的系统或装置中的一个或多个元件在没有更多限制的情况下不排除在系统或方法中存在其他元件或附加元件。术语“包含”、“包含有”或其任何其他变型旨在涵盖非排他性的包括,使得包含所列部件或步骤的设置、设备或方法不仅包含那些部件或步骤,而且可以包含没有明确列出或者这样的设置或设备或方法固有的其他部件或步骤。换句话说,以“包含
…
一”开始的系统或装置中的一个或多个元件在没有更多限制的情况下不排除在系统或方法中存在其他元件或附加元件。
101.术语“实施例”、“多个实施例”、“一个或多个实施例”、“一些非限制性实施例”和“一个实施例”是指“本公开的一个或多个(但非全部)实施例”,除非另有明确规定。对具有彼此通信的几个部件的实施例的描述并不意味着需要所有这样的部件。相反,描述了各种可选部件来说明本公开的各种可能的实施例。
102.本文中使用的任何方面、部件、元件、构造、动作、步骤、功能、指令等均不应被解释为关键或必要的,除非明确如此说明。如在说明书和权利要求书中使用的,单数形式的“一”、“个”和“该”包括复数指示物,除非上下文另有明确规定。而且,如本文所使用的,冠词“个(a)”和“个(an)”旨在包括一个或多个项目,并且可以与“一个或多个”和“至少一个”可互换地使用。此外,如本文所使用的,术语“集合”旨在包括一个或多个项目(例如,相关项目、不相关项目、相关和不相关项目的组合等),并且可以与“一个或多个”或“至少一个”可互换地使用。如果仅旨在使用一个项目时,使用术语“一个”或类似语言。而且,如本文所使用的,术语“有”、“具有”、“具备”等旨在是开放式术语。另外,短语“基于”旨在意味着“至少
部分地基于”,除非另外明确说明。
103.当本文描述了单个设备或制品时,显然可以使用不止一个设备/制品(不论它们是否协作)来代替单个设备/制品。类似地,在本文描述了不止一个设备或制品的情况下(不论它们是否协作),显然可以使用单个设备/制品来代替不止一个设备或制品,或者可以使用不同数量的设备/制品,而不是所示数量的设备或制品。设备的功能和/或特征可替代性地由没有明确地描述为具有这种功能/特征的一个或多个其它设备来实施。因此,其它实施例不必包括设备本身。
104.在本公开的实施例的以下详细描述中,参考了形成本公开的一部分的附图,并且在附图中通过说明可以实践本公开的具体实施例的方式示出。然而,应该理解的是,这并不旨在将本公开限制于所公开的形式,相反,本公开将涵盖落入本公开的精神和范围内的所有修改、等同物和替代物。应当理解,可以利用其他实施例,并且可以在不脱离本公开的范围的情况下进行改变。因此,下面的描述不应被理解为限制性的。
105.根据各种实施例,本公开提出了算法方法和新型驱动逻辑,其利用电机控制确保在使用流体注入器系统时的注入过程或方案期间,在适当的持续时间内递送适当体积的流体。本公开的方法补偿了由于在给定的注入窗口内的顺应性和由此导致的流体体积递送过少和过多所导致的体积改变,以确保满足流率、体积和持续时间精度要求的优化的流体递送性能。
106.市场上有多种类型的流体注入器系统,包括活塞驱动的基于注射器的流体注入器系统、基于压缩的流体注入器系统以及使用蠕动泵的流体递送。活塞驱动和基于压缩的递送技术利用活塞或压缩表面在给定的持续时间内以恒定或变化的速度移动,或者移动到指定的位置,以控制递送的流体体积和流动曲线。蠕动泵技术利用以给定rpm以每转或每分钟已知递送体积旋转的旋转辊来在给定时间内以定义的速率递送一定体积的流体。常规的注入器技术基于在注入的持续时间内的编程的或设定的(多个)流体流率来测量递送的流体的体积。
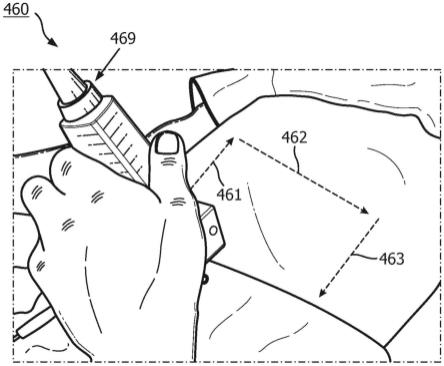
107.参考图1-2,其中相同附图标记在若干视图通篇指代相同零件,本公开的一个实施例总体上涉及多流体医疗注入器/注入器系统100(后文中“流体注入器系统100”),其在某些实施例中可以包含多次使用可弃式套件(muds)130,多次使用可弃式套件(muds)130配置为用于使用单次使用可弃式套件(suds)连接器和流体路径190(未详细示出)将流体递送到患者,并且在各种实施例中可以包含两个、三个或更多个可弃式流体储器或注射器,可弃式流体储器或注射器可以在一次注入过程或特定数目(多次使用)的注入过程之后被丢弃。流体注入器系统100可以是活塞驱动的、基于注射器的流体递送系统并且可以包含多个部件,如本文中所描述。总体上,图1-2中所示的流体注入器系统100具有动力流体注入器或其他给药设备和流体递送套件,流体递送套件意图与动力流体注入器相关联,以将一种或多种流体从一个或多个单剂量或多剂量容器在压力下递送到患者中,如本文中所描述。流体注入器系统100和与之相关联的流体递送套件的各种设备、部件和特征在本文中描述。
108.虽然参考具有图1-2中的muds 130和suds 190配置的流体注入器系统100示出了方法和过程的各种示例,但本公开不限于这样的注入器系统,并且可以用于其他基于注射器的注入器系统,诸如但不限于美国专利no.7,553,294、7,563,249、8,945,051、9,173,995、10,124,110、10,507,319、10,549,084、10,583,256以及美国申请公布no.2018/
0161496中所公开的系统;它们中的每一篇的公开通过引用整体并入本文。
109.参考图1,根据一个示例的流体注入器系统100包含注入器壳体102,其围封各种机械驱动部件、驱动机械驱动部件所需的电力和动力部件,以及控制部件,诸如电子存储器、处理器和电子控制设备,其用于控制与流体注入器系统100相关联的可往复移动活塞(未示出)的操作。这样的活塞可以经由机电驱动部件(诸如由电机驱动的滚珠丝杆、音圈致动器、齿轮齿条传动系统、线性电机、伺服电机、步进电机等)可往复操作。
110.流体注入器系统100可以包含至少一个大容量(bulk)流体连接器118,以与至少一个大容量流体源120连接。在一些示例中,可以提供多个大容量流体连接器118。例如,如图1中的流体注入器实施例中所示,可以以并排或其他布置提供三个大容量流体连接器118。在一些示例中,至少一个大容量流体连接器118可以包含尖刺,尖刺配置为用于可移除地连接到至少一个大容量流体源120,诸如药瓶、瓶,或袋。至少一个大容量流体连接器118可以形成在muds 130上或可以是muds 130的部分(如图2所示)。至少一个大容量流体源120可以配置为用于接收医疗流体(诸如生理盐水、林格氏乳酸、成像造影介质溶液,或其他医疗流体),以由流体注入器系统100递送到患者。
111.参考图2,muds 130可以被配置为用于可移除地连接到流体注入器系统100,以将一种或多种流体从一个或多个大容量流体源120递送到患者。muds 130的实施例的示例和特征在美国专利no.10,507,319中进一步描述并且与美国专利no.10,549,084中描述的suds 190一起操作。muds 130可以包含一个或多个流体储器,诸如一个或多个注射器132。如本文中所使用,术语“流体储器”是指能够例如在流体注入过程期间吸入并递送流体的任意容器,包含例如注射器、滚动膜片、泵、可压缩袋等。流体储器可以包含与流体储器的内部流体连通的流体通路的至少部分的内部体积(诸如一个或多个歧管或管路长度),包含在系统被关闭或与封闭系统的流体通路的其余部分流体隔离之后与流体储器保持流体连通的流体通路部分。流体储器的数目可以对应于大容量流体源120的数目。例如,参考图2,muds 130可以具有并排布置的三个注射器132,其中每个注射器132可流体连接到三个对应的大容量流体源120。每个注射器132可以由对应的大容量流体连接器118和相关联的muds流体路径134可流体连接到大容量流体源120之一。muds流体路径134可以具有尖刺元件,尖刺元件连接到大容量流体连接器118和流体管线150。在一些示例中,大容量流体连接器118可以直接提供在muds 130上。
112.继续参考图1和图2,muds 130可以包含一个或多个阀136(诸如旋塞阀),以控制哪个医疗流体或医疗流体的组合被从多剂量大容量流体源120(参见图1)抽取到流体储器132中和/或被从每个流体储器132通过歧管148递送到患者。在一些示例中,一个或多个阀136可以提供在多个注射器132的远端上或歧管148上。歧管148可以经由阀136与注射器132的内部体积可选择的流体连通。注射器132的内部体积可以经由阀136与muds流体路径134的第一端可选择的流体连通,muds流体路径134的第一端将每个注射器132连接到对应的大容量流体源120。muds流体路径134的相对第二端可以连接到相应的大容量流体连接器118。取决于一个或多个阀136的位置,流体可以被抽吸到一个或多个注射器132的内部体积中,或其可以被从一个或多个注射器132的内部体积递送。在第一填充位置,一个或多个阀136被取向为使得流体从大容量流体源120通过流体入口管线150流动到期望的注射器132中。在填充过程期间,一个或多个阀136被定位为使得流动通过一个或多个流体出口管线152和/
或歧管148的流体被阻挡。在第二递送位置,诸如在流体递送过程期间,来自一个或多个注射器132的流体通过注射器阀出口端口被递送到歧管148。在递送过程期间,一个或多个阀136被定位为使得流动通过一个或多个流体入口管线150的流体被阻挡。在第三位置,一个或多个阀136被取向为使得流动通过一个或多个流体入口管线150和一个或多个流体出口管线152或歧管148的流体被阻挡。从而,在第三位置,一个或多个阀136中的每一个隔离对应的注射器132并防止流体流动出入对应的注射器132的内部体积,因此限定了封闭系统。一个或多个阀136和/或流体出口管线152可以集成到歧管148中或通过歧管148流体连通。一个或多个阀136可以通过手动或自动处理选择性地定位到第一、第二和第三位置。
113.继续参考图1和图2,根据一些非限制性实施例,流体注入器系统100可以具有连接端口192,其配置为与suds的至少部分形成可释放流体连接。在一些示例中,连接端口192可以形成在muds 130上。符合期望地,suds与连接端口192之间的连接是可释放连接,以允许suds选择性地连接到连接端口192和从连接端口192断开。在一些示例中,suds可以在每个流体递送过程之后被从连接端口192断开并丢弃,并且新的suds可以连接到连接端口192以用于后续流体递送过程。suds可以被用于通过suds流体管线将一个或多个医疗流体递送到患者,suds流体管线具有远端,该远端可以与suds的本体选择性地断开并连接到患者导管。
114.再次参考图1,流体注入器系统100可以包含一个或多个用户界面124,诸如图形用户界面(gui)显示。用户界面124可以显示与涉及流体注入器系统100的流体注入过程有关的信息(诸如注入状态或进展、当前流量、流体压力,以及连接到流体注入器系统100的至少一个大容量流体源120中剩余的体积),并且可以是触摸屏gui,其允许操作者输入命令和/或数据以操作流体注入器系统100。此外,流体注入器系统100和/或用户界面124可以包含至少一个控制按键126以由操作者触觉操作。至少一个控制按键126可以是用户界面124的图形部分(诸如触摸屏)和/或可以位于流体注入器系统100的表面上。
115.虽然图1-2示出了流体注入器系统100的一个示例,应理解的是,本公开不限于任何特定类型或种类的流体注入器系统100。现参考图3,根据本公开的流体注入器系统100的另一非限制示例包含至少一个流体储器(诸如注射器12)、可连接到至少一个柱塞14的至少一个活塞103(未图示),以及流体控制模块(未图示)。至少一个注射器12总体上适配为与系统的至少一个部件(诸如注射器端口13)相接。流体注入器系统100配置为可释放地接收至少一个注射器12,至少一个注射器12要用至少一个流体f填充,如本文中所述。系统可以是多注射器注入器,其中若干注射器可以并排或另一空间关系取向,该若干注射器由与注入器相关联的相应活塞分开地致动。
116.继续参考图3,注入器系统100可以在医疗过程期间被用于通过用驱动构件(诸如至少一个活塞103(参见图4))驱动至少一个注射器12的柱塞14,将至少一个医疗流体f注入到患者的血管系统中。至少一个活塞可以在至少一个注射器的至少部分(诸如柱塞14)上可往复操作。一经接合,至少一个活塞可以将柱塞14朝向至少一个注射器的远端19移动,并且朝向至少一个注射器12的近端11缩回柱塞14。图4的流体注入器的非限制性示例在美国专利no.7,540,856中进行了描述。
117.管路套件17(例如,第一流体管道17a和第二流体管道17b,和公共流体管道20)可以与每个注射器12的出口端口流体连通,以将每个注射器置于与导管流体连通,以将流体f从每个注射器12递送到在血管接入位置进入患者中的导管(未示出)。第一流体管道17a和
第二流体管道17b可以通过本领域已知的任意适当机构连接到公共流体管道20。图3中所示的流体注入器系统100是开放系统,因为没有能够将注射器12彼此隔离并与管路套件17的至少部分隔离的阀。然而,应理解的是,可以远向于注射器12添加阀(与本文中描述的阀136相似),以将图3的流体注入器系统100转变为封闭系统。
118.现参考图4,根据本公开的流体注入器系统100可以与电子控制设备400相关联并由电子控制设备400控制,电子控制设备400配置为执行一个或多个注入器方案,包含例如流体填充、预注和递送操作。在一些示例中,电子控制设备400可以控制各种阀,旋塞阀、活塞构件和其他元件的操作,以影响期望的气体/空气移除、流体填充和/或流体递送过程。控制设备400可以集成到流体注入器系统100中,和/或可以与流体注入器系统100分离但与之通信。电子控制设备400可以包含至少一个处理器404、存储器408、输入部件410和输出部件412。电子控制设备还可以包含总线,总线允许电子控制设备400的部件之间的通信。至少一个处理器404可以实现为硬件、固件,或硬件和软件的组合。例如,处理器404可以包含处理器(例如,中央处理单元(cpu)、图形处理单元(gpu)、加速处理单元(apu)等)、微处理器、数字信号处理器(dsp)、和/或可以编程为执行功能的任意处理部件(例如,现场可编程门阵列(fpga)、专用集成电路(asic)等)。存储器408可以包含硬盘(例如,磁盘、光盘、磁光盘、固态盘等)和/或另一类型的计算机可读介质。输入部件410可以包含允许电子控制设备400诸如经由用户输入接收信息的部件(例如,用户界面124)。输出部件412可以包含提供来自电子控制设备400的输出信息的部件(例如,用户界面124)。
119.电子控制设备400可以编程或配置为基于至少一个处理器404执行由诸如存储器408的计算机可读介质储存的软件指令而进行一个或多个过程和/或方法。当执行时,储存在存储器408中的软件指令可以使至少一个处理器404进行本文中所描述的一个或多个过程和/或方法。
120.图4所示的电子控制设备400的部件的数量和布置作为示例提供。在一些非限制性实施例中,电子控制设备400可以包括比图4中所示的部件更多的部件、更少的部件、不同的部件或不同布置的部件。附加地或替代地,电子控制设备400的部件的集合(例如,一个或多个部件)可以执行被描述为由电子控制设备400的部件的另一集合执行的一个或多个功能。
121.继续参考图4,电子控制设备400(更特别地至少一个处理器404)可以与流体注入器系统100的一个或多个部件可操作通信,以控制流体注入器系统100的操作。电子控制设备400可以与一个或多个驱动部件510a、510b、510n可操作通信,以控制填充流体和从流体储器500a、500b、500n递送流体,一个或多个驱动部件510a、510b、510n与流体注入器系统100的一个或多个流体储器500a、500b、500n分别相关联。更特别地,一个或多个驱动部件510a、510b、510n中的每一个可以与流体储器500a、500b、500n之一相关联,使得流体储器500a、500b、500n中的每一个中含有的流体可以经由致动相关联的驱动部件510a、510b、510n而被选择性地递送。流体储器500a、500b、500n可以是图1-2的流体注入器系统100的注射器132和/或图3的流体注入器系统100的注射器12,或与之对应,如本文中所描述。一个或多个驱动部件510a、510b、510n可以是图1-3的流体注入器系统100的活塞(未图示),或可以与之对应。一个或多个流体储器500a、500b、500n可以与流体管道530(诸如suds 190或管路套件17)流体连通以将流体递送到连接到患者的导管或其他部件。
122.在封闭流体注入器系统100(例如,图1和图2的流体注入器系统100)的某些示例
中,电子控制设备400还可以与一个或多个阀520a、520b、520n可操作通信,以便旋转或以其他方式致动阀520a、520b、520n来引导流入和流出和/或将从流体储器500a、500b、500n中的一个或多个去往流体管道530的流动隔离。阀520a、520b、520n可以是图2中本文所描述的阀136或可以与之对应。
123.在某些示例中,至少一个处理器404可被编程或配置为执行流体注入方案(即流体递送过程),在此期间,至少一种流体被递送至患者。流体注入方案可包括编程的流率、要递送的流体的期望体积以及要递送的流体的类型或两种或多种流体的组合。每个流体注入方案可以具有一个或多个阶段,其中每个阶段具有预定流体流量、体积和流体类型设置。
124.在流体注入过程期间,通过例如一个或多个驱动部件510a、510b、510n向系统施加负载,以通过给药管线/流体路径套件将流体从一个或多个流体储器(即流体储器500a、500b、500n)递送至患者。每个流体储器(即流体储器500a、500b、500n)内产生的流体压力的变化可使系统以流体储器500a、500b、500n的增加的内部体积(即膨胀)、和/或例如耦合到每个驱动部件的柱塞的弹性机械偏转等以及与注入器部件相关的机械松弛的形式存储一些弹性能量。这种与压力相关的体积增加被称为系统的顺应性体积。基于每个流体储器500a、500b、500n和流体注入器系统100作为整体的已知特性,系统内流体压力的测量变化允许计算顺应性体积的对应变化。在一个实施例中,可以通过由至少一个处理器404使用关于流体压力、流体流量等的变化的信息执行的全局方程来确定顺应性体积。在另一个实施例中,可以通过使用能够测量例如系统的各种部件的膨胀、偏转等的一个或多个传感器来确定顺应性体积。系统的各个组成部分。在又一个实施例中,可以预先确定特定部件(例如,一定尺寸/型号的流体储器)的顺应性体积,并且该部件可以包括可扫描的条形码或其他指示符,其提供该部件在各种压力和流率条件下的顺应性体积特性。应当理解,确定顺应性体积的其他方法也是可能的。
125.在注入过程期间,流出注入器的流体流量增加典型地伴随着与注入器相关联的流体储器或泵内的压力增加。然而,在一段时间内压力的增加可能导致系统压力的进一步增加超过编程的增加,例如,由于机械偏转或具有不同密度的混合流体的固有流体动力学。例如,如果流体递送的压力在1秒的时间段内增加100psi,则流体流率必须增加以补偿压力的增加。
126.系统顺应性可导致压力梯度,压力梯度可导致实际流率偏离编程的流率。类似地,流体流率的梯度可能导致流体注入系统内的压力梯度。然而,如果压力在注入期间没有显著变化,则流体流率可以被认为是基本恒定的。如果忽略来自流体注入器特征的各种影响,例如由系统顺应性的基于位置的变化产生的影响或由随时间推移的蠕变产生的影响,则这是可能的。在理想条件下,如果压力瞬间达到稳态压力,则流体流率应为方波。然而,常规流体注入系统中的系统顺应性,例如流体递送部件(如流体储器和管路)的体积膨胀形式;或者由于在加压递送条件下吸收机械松弛而导致的体积增加,可能导致在注入器达到稳态压力曲线之前流体流量不准确。
127.参考图5,显示了流体注入方案的流体流量曲线610,其中,与压力几乎瞬间达到稳态压力的注入方案的流体流量曲线(实线)相比,顺应性体积影响递送至患者的流体的体积精度(点线)。从图5中可以看出,通过在示例性流体注入过程的测量的流量曲线610的开始615(在顺应性体积摄取期间)和结束616(在顺应性体积释放期间)的拖尾示出了流体体积
递送的不准确性。随着时间的推移,团剂(bolus)形状的变宽通常是由顺应性体积效应引起的。另一方面,编程的流率曲线620优选地具有编程的流率的近乎瞬时地上升,其在注入过程的持续时间内被维持,后续近乎瞬时地下降到零流率。编程的流率曲线620的基本上正方形曲线理想地基本上瞬时上升到稳态压力,并且在流体注入过程的开始和结束没有显示拖尾或仅显示最小的拖尾。
128.本公开的非限制性实施例涉及系统、设备、产品、装置和/或方法,用于通过使用电子控制设备400(例如,至少一个处理器404)控制一个或多个驱动部件(例如,一个或多个驱动组件510a、510b、510n)来建立流体流量的基于压力的控制而改善的和精确流体递送曲线。根据各种实施例,由一个或多个驱动部件510a、510b、510n命令的流率基于先前在短时间间隔内测量的压力改变,并且通过与预期压力改变相比的压力改变的算法分析来调整流率。在流体递送的持续时间内使用实时反馈回路,可以利用流体的压力改变和真实流体流率之间的精确关系来对下一个测量的流体流率进行调整,对短时间间隔内的流体递送过多或过少进行校正,从而得到的流率曲线图具有更方形的流率曲线,同时具有最小化的拖尾(类似于图5中的620)。
129.根据各种实施例,调整系统响应对该方法的实现方式可能很重要。如果系统响应太慢,则流体可能会以不期望的流率递送更长时间。例如,参考图9a、10a、11a和12a,指示实际流率的实线明显偏离期望的流率(虚线)或命令的流率(点线)。图9b、10b、11b和12b中所示的相关误差缓冲(以ml表示)表示用于具有次优或不可接受的流体递送曲线的系统的作为时间的函数的流体递送过多或过少。在压力增加的情况下,这意味着实际流率低于期望的速率(图9a-9b),并且而当压力降低时,实际流率将高于期望的流率(图10a-10b)。对于短持续时间或低体积的注入,过度抑制的响应,例如图11a-11b中例示的响应,是不可接受的。相反,如果初始响应太激进或者系统相对于已建立的边界太僵硬,则系统可能超过期望的流率,并且将在一段时间内以高于期望的流率递送,并且需要额外的时间来恢复和接近期望的流率(图10a-10b)。如果边界函数对于给定的系统是超响应的,则该方法可能在流率中引入不期望的振荡(图12a-12b)。
130.考虑到图9a-12b所示的场景,为了产生期望的注入器性能,本公开调整系统对压力的响应,使得流率调整与系统的压力响应相平衡,这由系统(包括流体储器、管路或其他流体路径部件、注入器部件和递送的流体)的刚度决定。为了避免缓慢或增强的反馈,在本公开的一些非限制性实施例中,本文描述的系统和方法缩放压力测量并将输入转换成流率,以便提供期望的流率的直接比较器。此外,选择测量间隔以提供期望的响应性,而给定时间间隔内压力的最大可允许偏差可防止过度敏感响应,并为物理系统提供足够的时间来起作用。最大可允许偏差与误差缓冲的结合允许在不引入不期望的波动或使系统组件变形的情况下实现相对较大的流率偏差。参考图13a,指示实际流率的实线基本上与期望的流率(虚线)或命令的流率(点线)相匹配。图13b中所示的相关误差缓冲(以ml表示)被调整以最小化作为时间函数的流体的递送过多或递送过少。
131.根据各种实施例,可通过确定例如由一个或多个驱动部件510a、510b、510n施加的力来测量压力改变。在一些实施例中,力传感器540可以与一个或多个驱动部件510a、510b、510n中的每一个相关联,并且可以被配置为用于测量由一个或多个驱动部件510a、510b、510n施加的力。在一些实施例中,可以使用一个或多个驱动部件510a、510b、510n来测量压
力。例如,可以通过测量一个或多个驱动部件510a、510b、510n的电机的电流并将电流测量与压力相关联来测量压力。以这种方式,一个或多个驱动部件510a、510b、510n用作传感器。由力传感器540获得的压力测量和/或一个或多个驱动部件510a、510b、510n的电流测量是估计的压力测量,因为它基于间接测量。根据进一步的实施例,压力改变可以通过其他方法测量,例如一个或多个压力传感器550被配置为用于测量流体储器和/或流体路径套件(例如一个或多个流体储器500a、500b、500n和/或流体管道530)中的实际流体压力。
132.在整个流体注入过程的持续时间内,不是通过编程的或设定的流率来确定流体流率,而是通过在流体注入过程期间的多个离散时间间隔期间测量实际流率来实现编程的流率曲线。通过测量每个时间间隔期间的流体压力差来确定实际流率,然后将每个时间间隔的实际流率与期望的流体流率进行比较。在每个时间间隔之后动态地调整压力,以补偿在(多个)后续时间间隔中流体体积的递送过多或递送过少。
133.在一些实施例中,电子控制设备400可配置成通过基于由至少一个传感器(例如力传感器540和/或压力传感器550)确定的压力测量控制一个或多个驱动部件510a、510b、510n的操作来执行流率控制。在进一步的实施例中,电子控制设备400可以被配置为通过基于由至少一个传感器(例如力传感器540和/或压力传感器550)确定的压力测量控制一个或多个驱动部件510a、510b、510n的操作来执行压力控制。例如,电子控制设备400,更具体地至少一个处理器404,可以被配置为用于基于在执行流体递送过程期间的时间间隔内由至少一个传感器(例如力传感器540、压力传感器550和/或一个或多个驱动部件510a、510b、510n的电机的电流)测量的压力改变,来确定流体递送过程的时间间隔期间的实际流率/压力。该时间间隔可以是流体递送过程运行时间的任何部分。在一些实施例中,时间间隔可以是1毫秒到5000毫秒。换句话说,在时间间隔期间的实际流率/压力可以通过在时间间隔的开始(第一压力测量)和结束(第二压力测量)进行压力测量来确定。
134.如本文所述,可通过移动操作流体注入设备的活塞的伺服控制电机或操作蠕动泵注入设备的伺服控制电机所需的力来测量压力。根据某些实施例,可以通过电机移动驱动部件所需的电流来测量力。第二压力测量和第一压力测量之间的差是在该时间间隔期间发生的压力改变。
135.可使用一个或多个缩放因子对计算的压力改变进行缩放,以考虑由例如注入器系统中流体的顺应性体积的吸收或释放引起的流体递送过多/递送过少。(多个)这种缩放因子对于流体注入器系统和/或正在执行的流体注入过程来说可能是唯一的。(多个)缩放因子可以基于一个或多个驱动部件510a、510b、510n、一个或多个流体储器500a、500b、500n、一个或多个流体储器500a、500b、500n中包含的流体、流体管道530以及在流体递送过程期间递送流体所需的压力中的至少一个的特性而变化。(多个)缩放因子可以表示为算法方程,例如线性算法方程。在一些实施例中,算法方程可以包括非线性函数,例如压力改变和缩放的压力值之间的指数关系。
136.电子控制设备400,更具体地说,至少一个处理器404,可进一步配置成在执行流体递送过程期间确定在时间间隔内的流体的实际流率。例如,实际流率可以表示为在时间间隔的持续时间内的缩放的压力改变的函数。电子控制设备400,更具体地至少一个处理器404,可以进一步配置成基于实际流率和编程的流率之间的差的绝对值来确定流率改变。电子控制设备400可以确定每个时间间隔的流率改变。
137.在一些实施例中,实际流率和编程的流率之间的最大可允许偏差或流率改变也可存储在电子控制设备400的存储器408中。最大可允许偏差或流率改变表示在流体递送过程的每个时间间隔期间实际流率和编程的流率之间的最大容许差。
138.在一些实施例中,实际流率和编程的流率之间的偏差或流率改变可由预定边界限制。在各种实施例中,预定边界可以是预设的最小阈值和最大阈值、编程的流率的百分比、基于包括编程的流率的一个或多个因素的函数、基于与编程的流率的标准偏差的统计极限、实际流率相对于编程的流率的移动平均值及其任意组合。
139.电子控制设备400,更具体地至少一个处理器404,可进一步配置成将最大可允许偏差或流率改变与时间间隔内实际流率和编程的流率之间的流率改变进行比较。该比较的结果是流率校正,其可用于确定后续时间间隔的新的编程的流率,如本文所述。以这种方式,可以调整用于后续时间间隔的新的编程的流率,以从先前的时间间隔增加或减少编程的流率,以便分别考虑先前时间间隔期间的任何流体递送过少或过多。
140.在一些实施例中,如果实际流率和编程的流率之间的流率改变高于最大可允许偏差或变化,则流率校正可等于最大允许流率改变。在进一步的实施例中,如果实际流率和编程的流率之间的流率改变小于或等于最大可允许偏差或变化,则流率校正可以等于实际流率。流率改变和最大可允许偏差或流率改变之间的差可以作为缓冲偏差存储在电子控制设备400的存储器408中,用于在第二时间间隔之后的后续时间间隔中确定新的流率校正。以这种方式,在流体递送过程期间实际递送的流体量的误差可以分散在多个时间间隔上,而不是仅在累积误差的时间间隔的后续时间间隔中被考虑。例如,流率改变和最大可允许偏差或流率改变之间的差的一部分可以被添加到累积误差的时间间隔之后的多个时间间隔的每一个中。每个后续时间间隔的流率校正可以基于最大可允许偏差和在每个后续时间间隔内实际流率与编程的流率的偏差之间的差,以及来自先前时间间隔的缓冲偏差。
141.可对每个后续时间间隔重复计算新的编程的流率,直至流体注入过程的最后时间间隔。以这种方式,来自先前时间间隔的新的编程的流率被用作当前时间间隔的编程的流率,并且为后续时间间隔计算更新的编程的流率。
142.根据各种实施例,可被编程到电子控制设备400的至少一个处理器404中的注入器逻辑的示例可包括以下步骤:
143.将所有变量初始化为零,
144.设置在流体注入过程的指定时间间隔期间使用的编程的流率(fd),
145.将最大允许流率改变(δfmax)设置为实际流率和编程的流率之间的最大差异,
146.通过致动至少一个驱动部件开始流体递送过程,
147.使用压力/力传感器和/或电机电流测量,在指定时间间隔的开始时测量第一压力(p1),
148.使用压力/力传感器和/或电机电流测量,在指定时间间隔的结束时测量第二压力(p2),
149.确定指定时间间隔内的压力改变(δp),并添加来自先前时间间隔的任何递送过多(od)(δp=p2
–
p1 od),
150.基于计算的压力改变(δp)和一个或多个缩放因子,确定缩放的压力改变(δps)(δps=a*δp b,其中a和b是每个注入器系统独有的常数)
151.基于指定时间间隔的结束(t2)和开始(t1)之间的缩放的压力改变确定指定时间间隔的实际流率(fa)(fa=δps/(t2
–
t1)),
152.基于实际流率(fa)和编程的流率(fd)之间的差的绝对值确定流率改变(δfr)(δfr=|fa
–
fd|),
153.将流率改变(δfr)与最大允许流率改变(δfmax)进行比较,
154.如果流率改变(δfr)大于最大允许流率改变(δfmax)(δfr》δfmax),则任何递送过多或递送过少都应在超过一个时间间隔内进行校正,
155.将流体流率校正(f*)设置为等于最大允许流率改变(δfmax)(f*=δfmax),
156.将流率改变(δfr)和最大允许流率改变(δfmax)之间的差存储在递送过多缓冲器(od)中,以在一个或多个后续时间间隔内添加,
157.如果流率改变(δfr)小于或等于最大允许流率改变(δfmax)(δfr《=δfmax),则可以在后续时间间隔内校正任何递送过多或递送过少,
158.将流率校正(f*)设置为等于增量流率f*=δfr,
159.为下一个时间间隔确定新的编程的流率(fn),其中新的速率基于前一个时间间隔的期望的流率(fd)和流率校正(f*)的组合(fn=fd f*),以及
160.使用来自每个时间间隔的新的流量(fn)作为后续时间间隔中的编程的流率,在流体递送过程的剩余时间间隔中重复该过程。
161.根据进一步的实施例,可被编程到电子控制设备400的至少一个处理器404中的注入器逻辑的示例可包括以下步骤:
162.将所有变量初始化为零,包括压力值、时间、压力误差和位置误差,
163.将一个或多个驱动部件510a、510b、510n的命令位置最大改变(δx_command_max)设置为编程的流率(fd)。在某些实施例中,编程的体积可以等于命令的位置改变和来自测量的压力改变的体积分量的总和。在具体实施例中,在方案开始时可以不设置所有δx_command的总和(δx_command_sum,如本文详细描述),因为来自测量的压力改变的体积分量可能不是先验已知的,因为体积分量可能取决于注入期间测量的压力,
164.在第一时间(t=0)测量当前压力(p_measured)和当前位置(x_measured),
165.将第一定时器设置为等于压力控制回路的迭代次数的持续时间(duration_1=n*duration_2),
166.将第二定时器设置为等于预定时间长度(例如,10μs)(持续时间2),
167.使用方程计算压力误差,其中压力误差是测量的压力和预定压力之间的差。压力误差可以计算为
168.pressure_error=p_set-p_measured;或者
169.pressure_error=p_measured-p_set,
170.所使用的方程取决于控制器的最终实现方式(通常涉及电路细节),
171.使用方程1计算作为计算的压力误差的函数的一个或多个驱动部件510a、510b、510n的命令的位置改变:
[0172][0173]
其中,k_p1、k_i1和k_d1分别是对压力误差、压力误差积分和压力误差导数中的任
何值进行缩放的增益。这些“压力增益”可以通过许多理论和经验方法获得。例如,k_p1、k_i1和k_d1的值可以使用齐格勒-尼科尔斯(ziegler-nichols)方法来获得,以在过程压力范围内的多个压力下在封闭的流体容器(例如注入器)中生成静压,
[0174]
如果一个或多个驱动部件510a、510b、510n的命令的改变结果大于编程的流率(fd),则命令的位置改变被设置为编程的流率(fd),
[0175]
如果一个或多个驱动部件510a、510b、510n的命令的位置结果小于0,则命令的位置被设置为0,
[0176]
使用以下方程计算作为一个或多个驱动部件510a、510b、510n的测量的位置和命令的位置的函数的位置误差:
[0177]
position_error=x_measured
–
x_command;或者
[0178]
position_error=
–
x_command
–
x_measured,
[0179]
使用方程2计算作为position_error的函数的递送给电机驱动部件的电流(或其他运动命令):
[0180][0181]
其中,k_p2、k_i2、k_d2分别是对位置误差、位置误差积分和位置误差导数中的值进行缩放的增益,并且i是电流(或其他命令)。这些“位置增益”可以通过许多理论和经验方法获得,
[0182]
开始duration_1和duration_2的定时器,
[0183]
基于计算的电流命令i致动计算的电机驱动,
[0184]
在duration_2结束时测量新的位置(x_measured),
[0185]
通过先前利用的关系计算新的位置误差,
[0186]
通过先前利用的关系计算新的电机驱动命令i,
[0187]
重复循环,直到duration_1到期(即,n次),
[0188]
重置duration_1和duration_2的定时器,
[0189]
测量新的当前压力(p_measured),
[0190]
计算新的压力误差,
[0191]
计算一个或多个驱动部件510a、510b、510n的新的命令的位置改变,开始duration_1和duration_2的定时器,和
[0192]
重复压力和位置控制的循环,直到所有δx_command(δx_command_sum)和从测量的压力改变缩放的体积分量之和等于vd。描述体积分量的函数通常是缩放的压力(p)和缩放的活塞位置(x)的非线性组合。例如,根据一个实施例,通过以下方程(3)计算体积分量:
[0193]
v_c=a b*p c*x d*p^2 e*x^2 f*p*x
ꢀꢀꢀ
(方程3)其中a到f是缩放因子,p是压力,并且x是活塞位置。
[0194]
图6说明了使用本文所述注入器逻辑的注入器系统的一个实施例的压力改变与流率改变之间的图形关系。例如,使用图6中的图,可以基于在时间间隔(根据图6的实施例为1秒)内观察到的或确定的压力改变来确定流体注入器的流率改变(ml/s)。
[0195]
图7示出了使用本公开的注入器逻辑的注入器系统的一个实施例的指定的编程的流率的实际流率的所得转换计算的图形关系。使用图7中的曲线图,对于指定的编程的流体
流率,对于在时间间隔(1秒)内观察到的压力改变,确定注入器系统的真实流率输出之间的差。
[0196]
已描述了各种流体注入器系统100和配置用于控制各种流体注入器系统100的操作的电子控制设备400的结构,现将参考图8描述一种方法开始,该方法用于在流体注入过程期间使用对流体注入器系统100的一个或多个驱动部件510a、510b、510n的实时、基于压力的控制来改善流体递送。
[0197]
在步骤804开始流体递送过程之前,例如通过使用电子控制设备400致动流体注入器系统100的一个或多个驱动部件510a、510b、510n,在步骤802设定流体递送过程的指定时间间隔的编程的流率和任何时间间隔期间的最大允许流率改变。例如,编程的流率和最大可允许偏差或流率改变可以存储在电子控制设备400的存储器408中。
[0198]
在初始时间段期间和在步骤806,在时间段开始时测量第一压力,并且在时间段结束时测量第二压力。如本文所述,可以使用与一个或多个驱动部件510a、510b、510n相关联的一个或多个力传感器540和/或与一个或多个流体储器500a、500b、500n和/或流体管道530相关联的一个或多个压力传感器550来测量压力。
[0199]
在步骤808,确定时间间隔期间的压力改变。第二压力测量和第一压力测量之间的差是在该时间间隔期间发生的压力改变。
[0200]
在步骤810,使用一个或多个缩放因子确定缩放的压力改变,以考虑由例如注入器系统中流体的顺应性体积的吸收或释放引起的流体递送过多/递送过少。如本文所述,(多个)缩放因子可基于一个或多个驱动部件510a、510b、510n、一个或多个流体储器500a、500b、500n、一个或多个流体储器500a、500b、500n中包含的流体、流体管道530以及在流体递送过程期间递送流体所需的压力中的至少一个的特性而变化。在一些实施例中,缩放的压力可以由代数方程确定,例如线性或非线性代数方程。
[0201]
在步骤812,确定时间间隔期间的实际流率。实际流率可以表示为在时间间隔的持续时间内缩放的压力改变的函数。
[0202]
在步骤814,确定实际流率和编程的流率之间的流率改变。流率改变可以表示为实际流率和编程的流率之间的差的绝对值。
[0203]
在步骤816,确定流量校正,该流量校正可用于校正后续时间间隔内的编程的流率。流量校正基于步骤814中确定的流率改变和存储的最大允许流率改变(步骤802)的比较。如果在步骤814中确定的流率改变大于在步骤802中设定的最大允许流率改变,则在一个以上的时间间隔内,流体中的任何递送过多或递送过少将被校正。以这种方式,流体流率校正被设置为等于最大允许流率改变(步骤818),并且流率改变和最大允许流率改变之间的差被存储在缓冲中,以被添加在(多个)后续时间间隔上。另一方面,如果在步骤814中确定的流率改变小于或等于在步骤802中设定的最大允许流率改变,则通过将流率校正设定为等于实际流率,在后续时间间隔中将校正流体中的任何递送过多或递送过少(步骤820)。
[0204]
在步骤822,确定后续时间间隔的新的编程的流率,其中新的编程的流率基于当前时间间隔的编程的流率(步骤802)和步骤816-820中确定的流率校正的组合。
[0205]
在步骤824中,使用来自每个时间间隔的新的编程的流率作为后续时间间隔中的编程的流率,在流体递送过程的剩余时间间隔内重复步骤802-822的过程。
[0206]
根据一些非限制性实施例,现将参照图16描述第二种方法900,该方法用于在流体
注入过程期间使用对流体注入器系统100的一个或多个驱动部件510a、510b、510n的实时、基于压力的控制来改善流体递送。方法900可以使用图15所示的压力控制系统来实现。
[0207]
在步骤904开始流体递送过程之前,例如通过使用电子控制设备400致动流体注入器系统100的一个或多个驱动部件510a、510b、510n,在步骤902,流体递送过程的指定时间间隔的编程的压力和任何时间间隔期间的最大允许压力改变设置为预定值或初始化为零(另见图15中的p_set)。例如,编程的压力和最大可允许偏差或压力改变可以存储在电子控制设备400的存储器408中。
[0208]
在步骤906,在时间段开始时测量第一压力,并且在时间段结束时测量第二压力。如本文所述,可以使用与一个或多个驱动部件510a、510b、510n相关联的一个或多个力传感器540和/或与一个或多个流体储器500a、500b、500n和/或流体管道530相关联的一个或多个压力传感器550来测量压力。
[0209]
在步骤908,确定压力误差。压力误差可以是测量的压力和编程的或期望的压力之间的差。
[0210]
在步骤910,一个或多个驱动部件510a、510b、510n的命令的位置改变被计算为使用公式1在步骤908确定的压力误差的函数(也参见图15中的δx_command)。比例积分微分控制器可用于作为压力误差的函数的该确定(见图15中的pid1)。tau(τ)是传输或转换压力数据以供处理器采取进一步行动所需的少量时间。例如,根据一个实施例,如果在时间t=t1取得压力,则处理器将不会接收数据(由于硬件或软件延迟、滤波等原因),直到时间t=t1 τ1,其中τ1是第一次测量的传输/转换延迟之间的延迟。根据各种实施例,tau(τ)非常小(微秒),但是当针对特定系统微调增益时,可能对pid增益值有实质性影响。参考图15,定时器1对应于更新的图15中的外部压力pid回路;定时器2对应于内部位置pid环路。根据各种实施例,计算的电机命令i在定时器2的持续时间内应用于电机。当定时器2到期时,测量驱动部件位置914(下面),并计算位置误差916,并计算新的电机指令i 918。电机命令回路使用定时器2重复n次,直到定时器1到期,此时重新测量压力,计算压力误差,并使用新的deltax_command重新开始pid循环。
[0211]
在步骤912中,命令的位置改变的上限和下限设定为大于零且小于编程的或期望的流率。
[0212]
在步骤914,确定一个或多个驱动部件510a、510b、510n的当前位置。在一些实施例中,一个或多个驱动部件510a、510b、510n的位置可以使用来自编码器或步进电机的信息来确定。
[0213]
在步骤916,确定一个或多个驱动部件510a、510b、510n的位置误差(例如,见图15中的x_measured)。在一些实施例中,一个或多个驱动部件510a、510b、510n的位置误差可以是一个或多个驱动部件510a、510b、510n的当前位置和一个或多个驱动部件510a、510b、510n的命令的位置之间的差。
[0214]
在步骤918中,一个或多个驱动部件510a、510b、510n的移动命令被确定为步骤916中确定的位置误差的函数。可以使用方程2来表达移动命令。第二比例-积分-微分控制器可用于该确定(见图15中的pid2)。与tau1一样,tau2(τ2)是t2处的测量与t2到达处理器的传输/转换延迟之间的小延迟。
[0215]
在步骤920,如果没有定时器处于活动状态,则开始第一定时器和第二定时器。第
一定时器等于基于第一定时器的压力控制回路的迭代次数的持续时间,第一定时器被设置为预定的时间长度。
[0216]
在步骤922,如果第一定时器处于活动状态,则开始第二定时器。在第一定时器和第二定时器开始(步骤920)或第二定时器开始(步骤922)之后,在步骤924中致动一个或多个驱动部件510a、510b、510n的移动命令。
[0217]
在步骤926中,如果第二定时器在一个或多个驱动部件510a、510b、510n的移动期间到期,则重置第二定时器,并重复步骤914-924。
[0218]
如果第一定时器在一个或多个驱动部件510a、510b、510n的移动过程期间到期,则在步骤928计算已输送的流体的总体积作为一个或多个驱动部件510a、510b、510n的位置改变和任何体积膨胀(例如由于系统的容度)的函数。
[0219]
如果递送的流体的总体积不等于编程的或期望的流体体积,则在步骤930重置第一定时器和第二定时器,并重复步骤906-924。
[0220]
如果已递送的流体的总体积等于编程的或期望的流体体积,则流体递送过程在步骤932终止。
[0221]
在一些非限制性实施例中,在流体注入过程期间使用流体注入器系统100的一个或多个驱动部件510a、510b、510n的实时、基于压力的控制的流体递送可应用于基于训练数据集的机器学习模型。例如,流体注入器系统100,例如流体注入器系统100的控制设备400,可以基于训练数据集生成机器学习模型,以基于期望的流体体积和递送速率提供改善的流体递送输出。图14a-14b示出了可以用作训练数据的压力和流率优化曲线。
[0222]
在一些非限制性实施例中,机器学习模型可设计为接收与注入过程相关的数据(例如执行流体递送过程期间的期望的流率)作为输入,并向控制设备400提供指令作为输出,以驱动一个或多个驱动部件510a、510b、510n,从而以期望的流率递送期望体积的流体。在一些非限制性实施例中,流体注入器系统100可以将机器学习模型(例如,供以后使用)存储在控制设备400的存储器中。
[0223]
在一些非限制性实施例中,如本文所述,流体注入器系统100的控制设备400可处理与在时间间隔期间进行的流体递送过程相关的数据(例如,与先前流体递送过程相关的历史数据),以获得机器学习模型的训练数据(例如,训练数据集)。例如,控制设备400可以处理数据以将数据改变成可以被分析以生成机器学习模型的格式。被改变的数据(例如,由改变生成的数据)可以被称为训练数据。在一些非限制性实施例中,控制设备400可处理与在选定时间间隔期间进行的先前流体递送过程相关联的数据,以基于接收数据获得训练数据。
[0224]
在一些非限制性实施例中,控制设备400可分析训练数据,以生成机器学习模型。例如,控制设备400可以使用机器学习技术来分析训练数据以生成机器学习模型。在一些非限制性实施例中,生成机器学习模型(例如,基于从与在选定时间间隔期间进行的先前流体递送过程相关联的历史数据获得的训练数据)可以被称为训练机器学习模型。机器学习技术可以包括例如监督和/或无监督技术,诸如决策树、随机森林、逻辑回归、线性回归、梯度提升、支持向量机、额外树(例如,随机森林的扩展)、贝叶斯统计、学习自动机、隐马尔可夫建模、线性分类器、二次分类器、关联规则学习等。在一些非限制性实施例中,机器学习模型可以包括特定于特定特性的模型,例如,特定于特定流体注入器系统100、流体注入器系统
100的特定用户、特定的一组与特定健康机构相关联的流体注射器系统100等的模型。附加地或替代地,机器学习模型可以特定于特定实体(例如,健康护理实体,如医院)。在一些非限制性实施例中,控制设备400可以为一个或多个实体、特定的一组实体和/或一个或多个实体的一个或多个用户生成一个或多个机器学习模型。
[0225]
附加地或替代地,当分析训练数据时,控制设备400可将一个或多个变量(例如,一个或多个独立变量)识别为预测变量(例如,特征),其可用于在分析训练数据时进行预测。在一些非限制性实施例中,预测变量的值可以是机器学习模型的输入。例如,控制设备400可将变量的子集(例如,真子集)识别为可用于准确预测流体递送过程的参数的预测变量。
[0226]
在一些非限制性实施例中,控制设备400可验证机器学习模型。例如,控制设备400可以在控制设备400生成机器学习模型之后验证机器学习模型。在一些非限制性实施例中,控制设备400可以基于用于验证的一部分训练数据来验证机器学习模型。例如,控制设备400可以将训练数据划分成第一部分和第二部分,其中第一部分可以用于生成机器学习模型,如上所述。在该示例中,训练数据的第二部分(例如,验证数据)可以用于验证机器学习模型。
[0227]
在一些非限制性实施例中,控制设备400可通过以下操作来验证机器学习模型:提供与流体注入器系统100相关的验证数据作为机器学习模型的输入,例如向控制设备400提供指令,以驱动一个或多个驱动部件510a、510b、510n来以期望的流率递送期望体积的流体,并基于机器学习模型的输出,例如递送的流体体积和递送该体积的流率,确定机器学习模型正确还是不正确地预测了满足所要求的体积和流率所需的流体注入参数。在一些非限制性实施例中,控制设备400可以基于验证阈值来验证机器学习模型。例如,控制设备400可以被配置为当体积和流率被机器学习模型正确预测时(例如,当机器学习模型正确预测预定义百分比(例如,大于70%)的指令以驱动一个或多个驱动部件510a、510b、510n来以期望的流率递送期望体积的流体时),机器学习模型被验证。
[0228]
在一些非限制性实施例中,如果控制设备400未验证机器学习模型(例如,当正确预测的流体注入过程的百分比不满足验证阈值时),则控制设备400可生成一个或多个附加的机器学习模型。
[0229]
在一些非限制性实施例中,一旦机器学习模型已被验证,控制设备400可基于接收新的训练数据进一步训练机器学习模型和/或生成新的机器学习模型。新的训练数据可包括与一个或多个流体递送过程相关的附加数据。控制设备400可使用机器学习模型来预测流体注入参数,并将机器学习模型的输出与新的训练数据进行比较,该新的训练数据包括与附加的流体注入过程相关联的数据。在这样的示例中,控制设备400可以基于新的训练数据更新一个或多个机器学习模型。
[0230]
尽管为了说明的目的已经基于当前认为最实用和最优选的实施例对本公开进行了详细描述,但应理解,此类详细说明仅用于该目的,并且本公开不限于所公开的实施例,相反,旨在涵盖所附权利要求的精神和范围内的修改和等效布置。例如,应该理解的是,本公开考虑到,在可能的程度上,任何实施例或方面的一个或多个特征可以与任何其他实施的一个或多个特征相结合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。