1.本发明涉及一种胶性手套的生产装置,具体地说是一种胶性手套免吹气脱模机。
背景技术:
2.在一次性手套、橡胶手套等胶性手套生产线上所使用的手套脱模机,是在机体上设置有由链条带动的行走机架,在行走机架上设置有脱模机械手,脱模机械手上的两个夹臂前伸夹住套在手模上的手套的腕部,再利用喷气嘴向手套的腕口部瞬时吹出大气量的气体,将手套的腕部吹开,使机械手夹持住手套的腕口部,待夹臂张开并沿行走架后退的过程中,即可将手套从手模上剥离下来,实现一次性手套与手模的剥离操作。
3.使用这种吹气脱模机存在有以下的弊端:一是每只手套的脱模吹气过程都会相应产生一次急促喷气所致的啸鸣音,在多条生产线并存的生产车间内,频繁产生的啸鸣音,就使得噪音污染十分严重,对生产工人的身体健康产生不利影响;二是大量喷气的使用,需要配置大型的空气压缩设备,不仅设备投资大,而且大型空气压缩设备的使用还导致了高耗能,相应加大了一次性手套的生产成本;三是吹气脱模机的脱模率只有95%左右,不能实现百分之百的手套脱模,由于未脱模手套的存在,客观上影响了手套生产线的正常生产。
技术实现要素:
4.本发明的目的就是提供一种胶性手套免吹气脱模机,以解决吹气脱模所导致的噪声污染、生产成本的增加以及不能实现全部脱模等的问题。
5.本发明的目的是这样实现的:一种胶性手套免吹气脱模机,包括脱模机械手,所述脱模机械手包括:底板,在其上设置有用于骑跨在行走机架的行走导轨上以实现底板在行走机架上往复移动的行走轮;手套腕部夹扩机构,设置在底板上,用于通过机构中的夹片夹持住套在手模上的手套的腕部,并在手套腕口被搓卷到夹片上之后将手套腕口扩开以脱模;机械手推移机构,穿接在底板上,用于在控制脱模机械手沿行走导轨移动的同时,控制手套腕部夹扩机构顺次实施夹紧和扩张的动作;腕口翻边夹持机构,与手套腕部夹扩机构相接,用于在手套腕部夹扩机构中的夹片夹住手套腕部之后,将手套的腕口搓卷到夹片上并夹住手套腕口;以及滑块推拉机构,穿接在底板上,用于推拉腕口翻边夹持机构,以对套在手模上的手套的腕口边实施搓卷动作。
6.进一步地,所述手套腕部夹扩机构包括两根直立的第一立杆,两根第一立杆各自通过一根连接轴铰接在底板上,在连接轴上套接有复位扭簧,复位扭簧的一端勾挂在第一立杆的下部,在第一立杆上接有横臂杆,两根第一立杆上的横臂杆的端部相邻并相对,在横臂杆的相对端旁侧接有开合轮;所述夹片呈楔形,设置在第一立杆的上部内侧;在第一立杆的上端穿接有伸向腕口翻边夹持机构的齿杆。
7.进一步地,所述机械手推移机构包括:第一导柱,垂直穿接在所述底板上;三角顶块,设置在所述第一导柱的顶部,用于推顶横臂杆端部的开合轮;定位块,固定连接在第一导柱的下端;滚珠球头,设置在定位块的底面,用于抵顶在机体的第二导轨上,并随第二导轨的起伏推动第一导柱和三角顶块实现升降变化;轮座,固定连接在定位块的侧面;以及滚轮,安装在轮座上,用于兜在机体的第一导轨的底部,并随第一导轨的位置变换带动底板沿行走导轨往复移动。
8.进一步地,所述腕口翻边夹持机构包括:第二立杆,有两根,分别与第一立杆的位置相对应;连接片,其一端连接在第一立杆的中部,另一端铰接在第二立杆的中部,以使第二立杆随同第一立杆一道夹紧或扩张;拉簧,位于连接片的下部,其一端连接在第一立杆上,另一端连接在第二立杆上,用以使第二立杆的下部始终靠向第一立杆;箱式滑块,设置在第二立杆的顶部,其上开有用以穿接齿杆的齿杆穿孔,在箱式滑块的内腔中设置有与齿杆相啮合的齿轮以及与齿轮同轴连接的胶轮,所述胶轮从箱式滑块的侧向开口窗中露出;以及滑块拨叉,叉柄端铰接在第二立杆上,叉槽端承接在箱式滑块侧壁上的凸头上,用以在第二立杆的带动下拨动箱式滑块动作。
9.进一步地,所述滑块推拉机构包括垂直穿接在底板上的第二导柱,第二导柱的下端与机械手推移机构中的轮座固定连接,在第二导柱的柱体上开有纵向的凹弧形豁口,在凹弧形豁口上压接有压合轮,所述压合轮穿接在轴杆的中部,所述轴杆的两端分接在第二立杆的下端,所述第二导柱位于所述轴杆与第一导柱之间。
10.本发明脱模机使用纯机械方式对生产线上的手套脱模,没有吹气过程以及喷气机构的设置,既省去了空气压缩设备的配置,免除了相应的能源消耗,降低了生产成本,同时还避免了吹气所产生的高分贝噪音污染,有利于环境和生产工人的身体健康,提高了手套生产的环保标准。更为关键的是,本发明脱模机利用楔形夹片夹持手套的腕部,再利用胶轮反向搓动手套的腕口部,对于具有胶性的一次性手套来说,这样就很容易将手套的腕口部翻到夹持手套的夹片上,并将翻起部分夹紧在夹片与胶轮之间,当脱模机械手再次扩张时,就可将手套的腕口部扩张开来,从而将手套从手模上顺利地剥离下来,由此实现了胶性手套的可靠脱模,避免了生产线上未脱模手套的存在,保证了手套生产线的正常生产。
附图说明
11.图1是本发明脱模机的整体结构示意图。
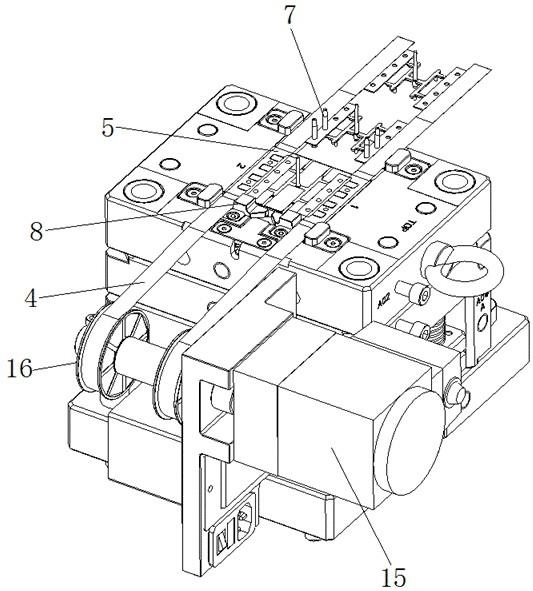
12.图2是脱模机械手的结构示意图。
13.图3是图2所示脱模机械手的后部结构示意图。
14.图中:1、行走导轨,2、前轴,3、行走轮,4、连接轴,5、耐磨套,6、第一导柱,7、三角顶块,8、开合轮,9、横臂杆,10、第一立杆,11、夹片,12、齿杆,13、胶轮,14、箱式滑块,15、导向
杆,16、滑块拨叉,17、第二立杆,18、连接片,19、第二导柱,20、拉簧,21、底板,22、轴座,23、复位扭簧,24、立轴,25、滚轮,26、轮座,27、定位块,28、滚珠球头,29、连接杆,30、行走副轮,31、后轴,32、机体,33、同步链条,34、链轮,35、同步调整轮,36、行走机架,37、脱模机械手,38、第一导轨,39、第二导轨,40、压合轮,41、轴杆,42、连接销。
具体实施方式
15.如图1所示,本发明胶性手套免吹气脱模机是在机体32上设置有两组环形的同步链条33,由链轮34带动旋转。将手套生产线上的主传动链条接引到本脱模机的同步调整轮35上,由同步调整轮35带动链轮34和链条33,实现本脱模机与手套生产线的同步运行。在两组同步链条33上跨接若干行走机架36,在每个行走机架上设置一套脱模机械手37,脱模机械手37可在行走机架36上往复移动。在机体32上还设置有两条导轨,其中一条是环形设置的第一导轨38,用以控制脱模机械手在行走机架36上的前后移动;另一条是仅在机体顶部设置且与第一导轨相毗邻的第二导轨39,用以控制脱模机械手的手套脱模动作。
16.如图2、图3所示,本发明脱模机中的脱模机械手是由底板21以及设置在底板上的手套腕部夹扩机构、机械手推移机构、腕口翻边夹持机构和滑块推拉机构等所组成。
17.图2中,在底板21上设置有四个行走轮3,行走轮3两两一组,骑跨在行走机架36上的两条平行的行走导轨1上,以实现脱模机械手的移动。在每个行走轮3的下方还对应设置一个行走副轮30,前排的两个行走副轮分别连接在前轴2上,后排的两个行走副轮分别连接在后轴31上。在前轴2和后轴31的两端分别接有直立的连接杆29,连接杆29穿过底板21后,上接行走轮3的轮轴。每个行走副轮30与其上部的行走轮3相配合,以对行走导轨1形成上下夹持的状态,从而防止脱模机械手与行走机架36的脱离。
18.如图2所示,手套腕部夹扩机构包括两根直立的第一立杆10,在第一立杆10的下部接有连接轴4,连接轴4的两端分别连接一个轴座22,轴座22固定连接在底板21上,形成第一立杆10与底板21之间的铰接关系。在连接轴4上套接有复位扭簧23,复位扭簧23的一端勾挂在第一立杆10的下部,使第一立杆10在常态下保持直立的缩位夹持状态。在第一立杆10的前侧接有横臂杆9,两根第一立杆10上的横臂杆9的端部相邻并相对,在横臂杆9的相对端的旁侧各自接有一个开合轮8。在第一立杆10的上部内侧设置有楔形的夹片11,两个夹片11的相对面带有一定的弧度,以构成夹持手模和手套的夹具。在第一立杆10的上端穿接固定有向后方伸出的齿杆12,用以插接到腕口翻边夹持机构中的箱式滑块14中。
19.如图2所示,机械手推移机构包括第一导柱6、三角顶块7、定位块27、滚珠球头28、轮座26和滚轮25等部分。第一导柱6有两根,垂直穿接在底板21上。在底板21上固定有带芯孔的耐磨套5,第一导柱6从耐磨套5上的芯孔中穿过。三角顶块7共接在两根第一导柱的顶部,并位于两个开合轮8对合处的正下方,用于将两个开合轮推顶开。定位块27固定连接在第一导柱6的下端,在定位块27的底面固定有滚珠球头28。轮座26连接在定位块27的侧面,滚轮25安装在轮座26上。滚轮25兜在机体32的第一导轨38的底部,随着第一导轨在机体32上分布形态的位置变换,带动底板21和机械手沿行走导轨1往复移动。同时,滚珠球头28的球头向下,用于抵顶在第二导轨39上滑动,并随着第二导轨39的起伏形态变换,按照脱模工序的操作需要,推动第一导柱6和三角顶块7实现升降高度的变化。
20.在三角顶块7向上的推顶作用下,两个开合轮8和横臂杆9产生向外侧的推动作用,
在复位扭簧23的配合下,两根第一立杆10的上部扩张,连带两个夹片11扩张开来。此时,配合行走机架36的向前移动,就可使两根第一立杆10(即机械手的夹臂)插入到由生产线上运行过来的一个手模的两边。当三角顶块7落下后,两根第一立杆10复位紧缩,此时,第一立杆上部的两个夹片11相向运动,夹在手模上的手套的腕部,完成手套脱模操作第一步的夹臂开合及夹片夹持的复合动作。
21.如图2所示,腕口翻边夹持机构包括第二立杆17、连接片18、拉簧20、箱式滑块14和滑块拨叉16等部分。第二立杆17有两根,设置在与第一立杆10相对的位置上,并通过中部横置的连接片18与第一立杆10连接在一起,其中,连接片18与第二立杆17的连接端是铰接形式,以使设置在第二立杆17上端的箱式滑块14能够以连接点为轴,进行适量的前后摆动。拉簧20位于连接片18的下部,其一端接第一立杆10,另一端接第二立杆17,用以拉动第二立杆17的下部回位,以使第二立杆的下部始终靠向第一立杆。箱式滑块14设置在第二立杆17的顶部,在其上开有齿杆穿孔,固定连接在第一立杆10上的齿杆12穿接在箱式滑块14的齿杆穿孔中。在箱式滑块14上还接有与齿杆12平行的导向杆15,导向杆15的自由端穿接在第一立杆10上的导向穿孔中,以使箱式滑块保持正位。在第二立杆17的上部旁侧还铰接有滑块拨叉16,箱式滑块14侧壁上的凸头位于滑块拨叉16的叉槽内,用以在第二立杆的摆动作用下拨动箱式滑块产生附随动作。在箱式滑块14中穿接有立轴24,在立轴24上分别接有齿轮(未图示)和胶轮13,齿轮位于箱式滑块14的内腔中,并与穿入滑块内腔的齿杆12相啮合;胶轮13暴露在箱式滑块内侧边的侧向开口窗中。胶轮13的轮面为双曲面,其与夹片11为等高设置。箱式滑块14的设置结构,可使箱式滑块14在随第二立杆17做小幅摆动的过程中,借助齿轮与齿杆12啮合作用,为胶轮13提供旋转动力,使胶轮对手套腕口边产生相应的搓卷动作;而第二立杆17上部的小幅摆动动作则是由滑块推拉机构控制并实现的。
22.如图2、图3所示,滑块推拉机构的主要构件包括第二导柱19、压合轮40和轴杆41。第二导柱19垂直穿接在轴杆41与第一导柱6之间的底板21上,其下端与机械手推移机构中的轮座26固定连接,随机械手推移机构中的第一导柱6同步升降。在第二导柱19的柱体后侧开有纵向的凹弧形豁口(图3),在凹弧形豁口上压接有压合轮40,压合轮40穿接在轴杆41的中部,轴杆41的两端分别制成一字形扁体,并穿接在第二立杆17下端的槽口中,当连接销42穿接固定后,即可将轴杆41与第二立杆17的下端相连接。
23.在第二导柱19随第一导柱6升起的过程中(对应三角顶块的向上推顶),压合轮40与凹弧形豁口的配合,使轴杆41带动第二立杆17的下端逐步靠近第一立杆10,相应地,位于第二立杆17顶部的箱式滑块14在滑块拨叉16的带动下向远离第一立杆的方向移动(此时对应的是机械手的夹臂扩张阶段)。在第二导柱19随第一导柱6下降的过程中(对应三角顶块的向下回缩),压合轮40与凹弧形豁口的配合,使轴杆41带动第二立杆17的下端逐步远离第一立杆10,相应地,位于第二立杆17顶部的箱式滑块14在滑块拨叉16的带动下向靠近第一立杆的方向移动,此时,夹片11夹持住套在手模上的手套的腕部,而转动的胶轮13则整好对手套的腕口边开始实施搓卷操作,并将搓起的腕口边卷绕到夹片上。在完成腕口翻边操作后,胶轮13停在夹片11的外沿上,将翻起的手套腕口边压在夹片上,实现对手套腕口边的稳定夹持。由此完成了手套脱模操作第二步的腕口翻边与夹持的复合动作。
24.此后,第一立杆10在三角顶块7的二次推顶作用下再次扩张,借助夹片11将手套的腕口部稳定撑开,此时,脱模机械手37在第一导轨38和滚轮25的带动下沿行走导轨1后移,
从而将腕部撑开的手套从手模上顺利剥离下来,由此完成了手套脱模操作第三步的手套剥离动作。
25.生产线上每有一只手模从机体32上方进入脱模机的操作空间,就对应有一个刚翻上不久的行走机架36上的脱模机械手37向前移动,并在随该手模移出脱模机操作空间之前,该行走机架36上的脱模机械手37完成上述的手套脱模三步动作。完成脱模后的脱模机械手37随行走机架36和同步链条33翻转至机体下部,并在第一导轨38的导引作用下,使脱模机械手37向行走机架36的后部移动,等待下次上翻之后的再次脱模操作。如此循环往复,机体32上分布的若干行走机架36和脱模机械手37即可满足手套生产线上的手模连续进入脱模机以及脱模机械手连续实施手套脱模的实际生产要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。