1.本说明书总体上涉及用于控制燃料蒸气滤罐装载量以减少蒸发排放物的方法和系统。
背景技术:
2.车辆燃料系统可以包括蒸发排放控制(evap)系统,所述蒸发排放控制系统被设计成减少燃料蒸气向大气的释放。例如,来自燃料箱的汽化碳氢化合物(hc)可以存储在填充有吸附剂的燃料蒸气滤罐中,所述吸附剂吸附并存储蒸气。特定地,燃料蒸气滤罐可以在燃料补给事件期间吸附来自燃料箱的hc,其中燃料蒸气的部分压力可以随着燃料箱中的压头体积减小而增加。随后,当车辆发动机在操作中时,evap系统允许将蒸气抽取到发动机进气歧管中以用作燃料。
3.燃料蒸气滤罐存储hc的容量可能受到环境条件变化的影响。例如,燃料蒸气滤罐容量可能在高温环境温度下减小并且在低温环境温度下增加,从而引起hc装载量的日间变化和气候引起的变化。特定地,在炎热气候中和在车辆驾驶循环之后,燃料蒸气滤罐可能由于排气的排热、路面的热辐射等而经受高温,这可能将燃料蒸气滤罐的吸附容量降低高达67%。如果在车辆关闭后停放在高温环境中,则可能会从车辆的evap系统中逸出穿透排放物。
4.解决来自燃料蒸气滤罐的穿透排放物的尝试包括基于预测性路线数据来操作evap系统。blumenstock等人在u.s.9,371,793中示出了一种示例性方法。其中,可以使用从例如车辆导航单元获得的数据和反映驾驶员的驾驶风格的数据(例如,基于加速器动力学)来确定何时要对燃料蒸气滤罐进行抽取。由导航单元提供的预测性路线数据允许控制器辨识车辆何时接近驾驶循环结束,在该驾驶循环期间执行燃料蒸气滤罐的再生。再生的正时对应于基于燃料蒸气滤罐的装载因子估计的值。因此,当车辆熄火时,燃料蒸气滤罐处于最大装载容量,从而使得能够在车辆停放时从燃料箱吸附燃料蒸气。
5.然而,本文的发明人已经认识到此系统的潜在问题。作为一个示例,燃料蒸气滤罐的再生需要在紧接在对车辆进行燃料补给之后的最小持续时间内进行发动机操作。最小持续时间(诸如20分钟)允许将hc从燃料蒸气滤罐完全抽取(例如,至少90%移除)到hc得以重新燃烧的发动机进气口。然而,在具有替代发动机技术的车辆(诸如起停、轻度混合动力电动车辆(hev)、可变排量发动机(vde)等)中,发动机可以操作持续小于最小持续时间。因此,由于燃料蒸气滤罐的吸附容量减小和高燃料箱蒸气压力(例如,日间蒸气)的组合,在短暂的发动机操作之后,在燃料箱补满燃料的情况下将车辆停放在高温条件下可能产生穿透排放物。
技术实现要素:
6.在一个示例中,上述问题可以通过一种用于在燃料补给事件期间通过增加燃料箱中的背压来停止向燃料箱分配燃料的方法来解决,燃料分配的停止是基于即将到来的燃料
蒸气滤罐抽取事件和估计的燃料蒸气滤罐装载容量中的一者或多者。以这种方式,可以降低在燃料补给事件之后的车辆关闭时段期间的穿透排放物的可能性。
7.作为一个示例,方法可以包括自适应燃料补给调整,其中即将到来的燃料蒸气滤罐抽取和估计的燃料蒸气滤罐装载容量可以用于确定预测的滤罐穿透值。可以将所述值与阈值进行比较,并且如果被确认为高于阈值,则可以使分配到燃料箱的燃料量减少。通过减少所分配的燃料的量,在燃料补给事件期间减少燃料蒸气滤罐处的装载。从而避免车辆关闭时段期间的穿透排放。
8.应当理解,提供以上发明内容是为了以简化的形式介绍在具体实施方式中进一步描述的一系列概念。并不意味着识别所要求保护的主题的关键或必要特征,所述要求保护的主题的范围由随附于具体实施方式的权利要求唯一地限定。此外,所要求保护的主题不限于解决上文或本公开的任何部分中提及的任何缺点的实现方式。
附图说明
9.图1示出了示例性车辆推进系统。
10.图2示出了可以与图1的车辆推进系统联接的示例性燃料系统和蒸发排放(evap)控制系统。
11.图3示出了可以在包括图2的evap控制系统的车辆中实现的示例性用户界面。
12.图4示出了用于经由燃料蒸气滤罐处的自适应燃料补给调整来减少穿透排放物的方法的示例。
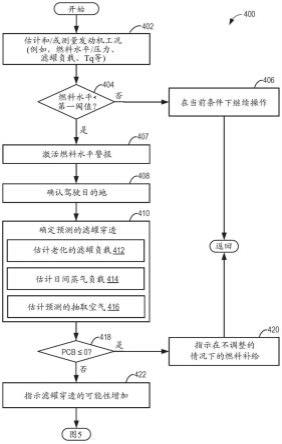
13.图5示出了用于在燃料补给事件期间减少分配到燃料箱的燃料体积的方法的示例。
14.图6示出了在车辆中的自适应燃料补给调整期间evap系统中的示例性操作和参数。
具体实施方式
15.以下描述涉及用于减少来自车辆的蒸发排放物的系统和方法。车辆可以至少部分地由发动机推进,发动机可能在燃料燃烧期间产生不期望的排放。图1中示出了利用发动机和电能两者来为车辆行驶提供动力的车辆的推进系统的示例。发动机的燃料系统可以包括evap系统,如图2所示,以减少发动机操作期间的排放。然而,在燃料蒸气被evap系统的燃料蒸气滤罐吸附期间的燃料补给事件之后,当车辆在短的驾驶循环之后停放并暴露于环境温度的升高时,可能发生滤罐穿透(例如,由于燃料蒸气滤罐的饱和,燃料蒸气从evap系统中逸出)。为了降低滤罐穿透的可能性,可以实现自适应燃料补给调整以基于燃料补给事件之后的预期的(例如,预测的)滤罐抽取事件和预期的滤罐装载量来调节分配到车辆的燃料箱的燃料量。可以在车辆的用户界面处向车辆用户通知对燃料补给的调整,如图4所示。用于经由自适应燃料补给调整来缓解滤罐穿透以及用于在燃料补给期间调整所分配的燃料量的方法的示例分别在图4和图5中示出。图6中描绘了在执行自适应燃料补给调整期间evap系统的操作变化。
16.图1示出了示例性车辆推进系统100。车辆推进系统100包括燃料燃烧发动机110和马达120。作为非限制性示例,发动机110可以是内燃发动机,并且马达120可以是电动马达。
马达120可以被配置为利用或消耗与发动机110不同的能源。例如,发动机110可以消耗液体燃料(例如,汽油)来产生发动机输出,而马达120可以消耗电能来产生马达输出。因此,具有推进系统100的车辆可以被称为混合动力电动车辆(hev)。
17.车辆推进系统100可以根据车辆推进系统遇到的工况来利用各种不同的操作模式。这些模式中的一些模式可以使得发动机110能够维持在关闭状态(即,被设定为停用状态)中,在所述关闭状态中,发动机处的燃料的燃烧被中止。例如,在选定工况下,当发动机110停用时,马达120可以如箭头122所指示经由驱动轮130推进车辆。
18.在其他工况期间,可以将发动机110设定为停用状态(如上文所描述的),而可以操作马达120以对能量存储装置150进行充电。例如,如箭头122所指示,马达120可以从驱动轮130接收车轮扭矩,其中马达可以将车辆的动能转换成电能以如箭头124所指示存储在能量存储装置150处。该操作可以被称为车辆的再生制动。因此,在一些实施例中,马达120可以提供发电机功能。然而,在其他实施例中,发电机160可以替代地从驱动轮130接收车轮扭矩,其中发电机可以将车辆的动能转换成电能以如箭头162所指示存储在能量存储装置150处。
19.在又其他工况期间,发动机110可以通过燃烧如箭头142所指示从燃料系统140接收的燃料进行操作。例如,在马达120停用时,可以操作发动机110以如箭头112所指示经由驱动轮130推进车辆。在其他工况期间,发动机110和马达120两者各自可以操作以经由驱动轮130推进车辆,分别如箭头112和122所指示。发动机和马达两者可以选择性地推进车辆的配置可以被称为并联型车辆推进系统。应注意,在一些实施例中,马达120可以经由第一组驱动轮推进车辆,并且发动机110可以经由第二组驱动轮推进车辆。
20.在其他实施例中,车辆推进系统100可以被配置为串联型车辆推进系统,其中发动机并不直接推进驱动轮。而是,可以操作发动机110以对马达120供电,所述马达继而可以经由驱动轮130推进车辆,如箭头122所指示。例如,在选定工况期间,发动机110可以驱动发电机160,所述发电机继而可以向以下中的一者或多者供应电能:如箭头114所指示的马达120或如箭头162所指示的能量存储装置150。作为另一个示例,可以操作发动机110以驱动马达120,所述马达继而可以提供发电机功能以将发动机输出转换成电能,其中电能可以存储在能量存储装置150处以供马达后续使用。
21.燃料系统140可以包括用于将燃料存储在车辆上的一个或多个燃料存储箱144。例如,燃料箱144可存储一种或多种液体燃料,包括但不限于:汽油、柴油和醇类燃料。在一些示例中,燃料可以作为两种或更多种不同燃料的共混物存储在车辆上。例如,燃料箱144可以被配置为存储汽油和乙醇的共混物(例如e10、e85等)或汽油和甲醇的共混物(例如m10、m85等),其中这些燃料或燃料共混物可以如箭头142所示输送到发动机110。还可以向发动机110供应其他合适的燃料或燃料共混物,其中它们可以在发动机处燃烧以产生发动机输出。可以利用发动机输出来如箭头112所指示推进车辆或者经由马达120或发电机160对能量存储装置150再充电。
22.在一些实施例中,能量存储装置150可被配置为存储电能,所述电能可供应到驻留在车辆上的其他电气负载(除马达之外),包括车厢供暖和空调、发动机起动、前照灯、车厢音频和视频系统等。作为一个非限制性示例,能量存储装置150可包括一个或多个电池和/或电容器。
23.控制系统190可以与发动机110、马达120、燃料系统140、能量存储装置150和发电机160中的一者或多者通信。控制系统190可以从发动机110、马达120、燃料系统140、能量存储装置150和发电机160中的一者或多者接收传感反馈信息。此外,控制系统190可以响应于此传感反馈而向发动机110、马达120、燃料系统140、能量存储装置150和发电机160中的一者或多者发送控制信号。控制系统190可以从车辆操作者102接收对操作者请求的车辆推进系统输出的指示。例如,控制系统190可以从与踏板192通信的踏板位置传感器194接收传感反馈。踏板192可以示意性地指代制动踏板和/或加速踏板。
24.能量存储装置150可以如箭头184所指示周期性地从驻留在车辆外部(例如,不是车辆的一部分)的电源180接收电能。作为非限制性示例,车辆推进系统100可以被配置为插电式混合动力电动车辆(hev),从而电能可以经由电能传输电缆182从电源180供应到能量存储装置150。在从电源180对能量存储装置150再充电的操作期间,电力传输电缆182可使能量存储装置150与电源180电耦合。当操作车辆推进系统来推进车辆时,电力传输电缆182可以在电源180与能量存储装置150之间断开。控制系统190可以识别和/或控制存储在能量存储装置处的电能的量,其可以被称为荷电状态(soc)。
25.在其他实施例中,可以省略电力传输电缆182,其中可以在能量存储装置150处从电源180无线地接收电能。例如,能量存储装置150可以经由电磁感应、无线电波和电磁共振中的一者或多者从电源180接收电能。因此,应当理解,可以使用任何合适的方法来从不构成车辆的一部分的电源(诸如从太阳能或风能)对能量存储装置150进行再充电。以这种方式,马达120可以通过利用与发动机110所利用的燃料不同的能源来推进车辆。
26.燃料系统140可以周期性地从驻留在车辆外部的燃料源接收燃料。作为非限制性示例,车辆推进系统100可以通过经由燃料分配装置170接收燃料来燃料补给,如箭头172所指示。在一些实施例中,燃料箱144可以被配置为存储从燃料分配装置170接收到的燃料,直到它被供应到发动机110以供燃烧。在一些实施例中,控制系统190可以经由燃料水平传感器接收对存储在燃料箱144处的燃料的水平的指示。存储在燃料箱144处的燃料的水平(例如,如由燃料水平传感器识别的)可以例如经由燃料量表或车辆仪表板196处的显示器中的指示而传达给车辆操作者。
27.图2示出了车辆系统206的示意图。车辆系统206包括发动机系统208,所述发动机系统联接到排放控制系统251和燃料系统218。排放控制系统251包括可以用于捕获和存储燃料蒸气的燃料蒸气容器,诸如燃料蒸气滤罐222。在一些示例中,车辆系统206可以是hev系统,诸如图1的车辆推进系统100。图1的控制系统190还包括在车辆系统206中。
28.发动机系统208可以包括图1的发动机110,其中发动机110被示出为具有多个气缸230。发动机110包括发动机进气口223和发动机排气口225。发动机进气口223包括节气门262,所述节气门经由进气通道242流体联接到发动机进气歧管244。发动机排气口225包括通向排气通道235的排气歧管248,所述排气通道将排气引导到大气。发动机排气口225可以包括一个或多个排放控制装置270,所述排放控制装置可以安装在排气口中的紧密联接位置处。一个或多个排放控制装置270可以包括三元催化器、稀nox捕集器、柴油微粒过滤器、氧化催化器等。应当理解,发动机系统208中可以包括其他部件,诸如多种阀和传感器。
29.燃料系统218可以包括燃料箱220,所述燃料箱联接到燃料泵系统221。在一个示例中,燃料箱220可以是图1的燃料箱144的实施例。燃料泵系统221可以包括一个或多个泵以
用于对输送到发动机210(其可以是图1的发动机110的实施例)的喷射器(诸如所示的示例性喷射器266)的燃料进行加压。尽管仅示出单个喷射器266,但为每个气缸提供另外的喷射器。应当理解,燃料系统218可以是无回流燃料系统、回流燃料系统或各种其他类型的燃料系统。
30.在燃料系统218中产生的蒸气可以在被抽取到发动机进气口223之前经由蒸气回收管线231输送到包括燃料蒸气滤罐222的evap系统251。蒸气回收管线231可以经由一个或多个导管联接到燃料箱220,并且可以包括用于在某些状况期间隔离燃料箱的一个或多个阀。例如,蒸气回收管线231可以经由导管271、273和275中的一者或多者或者它们的组合联接到燃料箱220。
31.此外,在一些示例中,一个或多个燃料箱通风阀可以定位在导管271、273或275中。除了其他功能之外,燃料箱通风阀还可以允许排放控制系统的燃料蒸气滤罐保持低压或真空,而不增加燃料箱的燃料蒸发速率(这在燃料箱压力降低的情况下原本会发生)。例如,导管271可以包括坡度通风阀(gvv)287,导管273可以包括填充限制通风阀(flvv)285,并且导管275可以包括坡度通风阀(gvv)283。此外,在一些示例中,回收管线231可以联接到燃料加注系统219。在一些示例中,燃料加注系统可以包括用于相对于大气来密封燃料加注系统的燃料箱盖205。燃料加注系统219经由燃料加注管211或口颈211联接到燃料箱220。
32.此外,燃料加注系统219可以包括燃料补给锁245。在一些实施例中,燃料补给锁245可以是燃料箱盖锁定机构。燃料箱盖锁定机构可以被配置为自动将燃料箱盖205锁定在关闭位置,使得燃料箱盖不能被打开。例如,当燃料箱220中的压力或真空大于阈值时,燃料箱盖205可以经由燃料补给锁245保持锁定。响应于燃料补给请求,例如车辆操作者发起的请求,燃料箱可以被减压,并且在燃料箱中的压力或真空下降到阈值以下之后可以将燃料箱盖解锁。在本文,解锁燃料补给锁245可以包括解锁燃料箱盖205。燃料箱盖锁定机构可以是闩锁或离合器,其在接合时防止燃料箱盖的移除。闩锁或离合器可以例如通过螺线管被电锁定,或者可以例如通过压力隔膜被机械锁定。
33.在一些实施例中,燃料补给锁245可以是位于燃料加注管211的口部处的加注管阀。在此类实施例中,燃料补给锁245可以不阻止燃料箱盖205的移除。而是,燃料补给锁245可以阻止燃料补给泵插入燃料加注管211中。加注管阀可以例如通过螺线管被电锁定,或者例如通过压力隔膜被机械锁定。
34.在一些实施例中,燃料补给锁245可以是燃料补给口锁,诸如锁定位于车辆的车身面板中的燃料补给口的闩锁或离合器。燃料补给口锁可以例如通过螺线管被电锁定,或者例如通过压力隔膜被机械锁定。
35.在其中使用电气机构锁定燃料补给锁245的实施例中,例如当燃料箱压力降低到压力阈值以下时,可以通过来自控制系统190的控制器212的命令将燃料补给锁245解锁。在使用机械机构锁定燃料补给锁245的实施例中,例如当燃料箱压力降低到大气压力时,燃料补给锁245可以经由压力梯度被解锁。
36.排放控制系统251可以包括填充有合适的吸附剂的一个或多个燃料蒸气滤罐222(在本文中也被简称为滤罐),所述滤罐被配置为暂时捕集在燃料箱燃料补给操作期间产生的燃料蒸气(包括汽化碳氢化合物)以及“运行损耗”蒸气(即,在车辆操作期间汽化的燃料)。在一个示例中,所使用的吸附剂是活性炭。燃料蒸气滤罐222包括缓冲器224,所述缓冲
器可以包括与燃料蒸气滤罐222相同或不同的吸附剂。
37.缓冲器224可以被定位成使得在滤罐装载期间,例如,当燃料蒸气滤罐222从导管276接收燃料蒸气时,燃料蒸气首先被缓冲器224吸附,然后一旦缓冲器224饱和,就被燃料蒸气滤罐222中的吸附剂吸附。相比之下,在对滤罐222进行抽取时(其中空气通过滤罐通风路径或通风管线227吸入),燃料蒸气首先从滤罐中解吸(例如,达到阈值量),然后再从缓冲器224中解吸。通风管线227包括在排放控制系统251中,并且通风管线227可以在储存或捕集来自燃料系统218的燃料蒸气时将气体从燃料蒸气罐222排出到大气中。
38.当经由抽取管线228和抽取阀261将存储的燃料蒸气从燃料系统218抽取到发动机进气口223时,通风管线227还可以允许新鲜空气经由通风阀229被吸入滤罐222中。例如,抽取阀261可以是常闭的,但是可以在某些状况(诸如某些发动机运行状况)期间打开,使得来自发动机进气歧管244的真空被施加到燃料蒸气滤罐以进行抽取。在一些示例中,通风管线227可以包括设置在其中的位于滤罐222上游的任选空气滤清器259。滤罐222与大气之间的空气和蒸气的流动可以通过滤罐通风阀229来调节。
39.燃料箱220经由导管276流体地联接到滤罐222。控制燃料箱蒸气从燃料箱220和蒸气回收管线231到滤罐222中的流入的燃料箱隔离阀(ftiv)252沿着导管276定位。在一些示例中,滤罐222可以经由多于一个导管连接到ftiv 252,并且ftiv 252可以是能够调整导管之间的流动的多向阀。导管可以联接到燃料罐222的不同区域。
40.ftiv 252在被调整到打开位置时,允许将燃料蒸气从燃料箱220排放到滤罐222。燃料蒸气可以存储在滤罐222中,而从燃料蒸气中剥离的空气则经由滤罐通风阀229排入大气。当发动机状况允许时,可以经由滤罐抽取阀261将滤罐222中存储的燃料蒸气抽取到发动机进气口223,其中由于压力梯度,燃料蒸气被吸入到发动机进气口223中。
41.控制系统190被示出为从多个传感器216(其各种示例在本文中有所描述)接收信息并向多个致动器281(其各种示例在本文中有所描述)发送控制信号。作为一个示例,传感器216可以包括位于排放控制装置上游的排气传感器237、排气温度或压力传感器233、燃料箱压力传感器(ftpt)或压力传感器291和滤罐负载传感器243。这样,压力传感器291提供对燃料系统压力的估计。在一个示例中,燃料系统压力是燃料箱压力,例如燃料箱220内的压力。诸如压力、温度、空燃比和成分传感器的其他传感器可以联接到车辆系统206中的各个位置。作为另一个示例,致动器可以包括燃料喷射器266、节气门262、ftiv 252、燃料补给锁245、滤罐通风阀229和滤罐抽取阀261。控制系统190的控制器212可以从各种传感器接收输入数据,处理输入数据,并响应于处理后的输入数据基于与一个或多个例程相对应的指令或编程在指令中的代码来触发致动器。控制器212从图2的各种传感器接收信号,并采用图2的各种致动器来基于接收到的信号和存储在控制器212的存储器中的指令调整发动机操作。
42.例如,响应于检测到滤罐负载达到阈值水平,如经由滤罐负载传感器243估计的,可以发起对燃料蒸气滤罐222的抽取。阈值水平可以是接近或达到滤罐吸附剂的最大饱和的燃料蒸气吸附量。在确认在发动机进气歧管244处产生真空后,可以打开抽取阀261和通风阀229以允许燃料蒸气被解吸并冲洗到发动机进气歧管244。
43.车辆的evap系统可以依赖于燃料蒸气滤罐的抽取来维持滤罐的吸附效率并控制车辆排放。燃料蒸气滤罐的装载容量可以根据抽取循环的持续时间以及环境条件而变化。
例如,当环境温度高并且车辆已经行驶足够长的时间而使滤罐经历高温(诸如大于93摄氏度)时,燃料蒸气滤罐的装载容量可能会降低。当在燃料蒸气滤罐处于降低的装载容量时对车辆进行燃料补给时,滤罐可能无法吸附在燃料补给期间产生的蒸气,并且可能发生滤罐穿透。
44.此外,在非常规车辆(例如,具有起/停技术的车辆、vde和hev)中,在燃料补给之后发动机可能不会操作足够长的时间段来允许对燃料蒸气滤罐进行抽取。如果然后将车辆停放在高温环境中,则燃料蒸气可能会解吸并逸出到大气中。特定地,当车辆被补满燃料时,例如,当燃料箱被重新填充到满容量时,当车辆在燃料箱加满的情况下停放时,排放的可能性增加。
45.为了至少部分地解决这些问题,一种用于自适应燃料补给调整的方法(包括基于预计的燃料补给后抽取事件和预计的滤罐装载容量来调整燃料补给)可以用于控制燃料蒸气从燃料蒸气滤罐的逸出。可以基于预测性机器学习和存储在通信平台(诸如云服务器)处的关于先前驾驶路线和目的地的信息来确定抽取事件和滤罐装载容量两者的预计。例如,通过预期燃料补给事件之后的驾驶循环的持续时间和目的地,车辆控制器(例如,图2的控制器212)可以确定燃料蒸气滤罐是否将被充分抽取。还可以基于驾驶路线和目的地预计来预期车辆是否将在燃料补给事件之后不久停放,以及车辆在停放时可能经受的环境条件。
46.基于预测性信息调整燃料补给可以包括减少通过例如燃料分配泵(诸如图1的燃料分配装置170)分配到车辆的燃料箱的燃料量。作为示例,在其中预期燃料蒸气滤罐在燃料补给事件之后被充分抽取的燃料补给事件期间,flvv(例如,图2的flvv 285)在检测到燃料水平达到阈值水平时可以密封燃料箱。当燃料箱被密封时,产生背压,这导致燃料分配泵停止分配燃料。阈值水平可以是燃料箱的最大容积容量,例如,燃料箱被填充90%。
47.当预测性数据指示在燃料补给事件之后由于例如被动发动机操作而不会对燃料蒸气滤罐进行充分抽取时,可以提供减少要分配到燃料箱中的燃料量的选项。例如,控制器可以接收指示基于预测性路线规划器和/或过去的驾驶循环确定的到未来目的地的距离、车辆的起停操作、车辆的预期速度等可能无法提供足够长的发动机操作来对燃料蒸气滤罐进行抽取的信息。在燃料补给期间燃料箱中的燃料的阈值水平可以被调整到较低的体积,诸如燃料箱的最大体积容量的70%。如果预测车辆在燃料补给事件之后停放在可能将车辆暴露于高温的位置,则燃料补给体积也可能减少。
48.作为示例,基于预测性数据和gps信息,可以预期车辆在室外环境中长时间停放,例如超过一天。暴露于室外环境可以包括在一天中最热的时间期间使车辆经受高温,这可以增加燃料箱中的蒸气压力并降低燃料蒸气滤罐的装载容量。如果燃料箱已满,则燃料蒸气可以产生足够的压力以要求将燃料蒸气排放到燃料蒸气滤罐。然而,燃料蒸气滤罐的减小的装载容量可能不允许进一步吸附燃料蒸气,并且蒸气可以替代地释放到大气中。
49.通过减少燃料补给体积,可以减少在车辆停放时的日间蒸气的排放,例如,由温度的日常变化引起的燃料的汽化。燃料补给体积减少可以使得燃料蒸气滤罐的装载量较低并且滤罐穿透可能性较低。可以通过在车辆控制器(例如,图2的控制器212)处实现的方法来估计燃料补给体积的减少。提供诸如路线信息、基于类似车辆动力传动系统估计的抽取空气流量、天气预报等数据的一个或多个数据库可以存储在控制器的存储器中。另外或替代地,控制器可以通信地链接到存储在可无线访问的平台(诸如云服务器)上的一个或多个外
部数据库,以从外部数据库中检索信息。
50.如上所述,确定燃料补给体积的减少可以至少部分地依赖于燃料补给事件之后的可用抽取时间的估计值。例如,可以通过参考路线规划器和/或存储在控制器存储器中的车辆行驶日志来推断抽取时间。在车辆用于约车操作或自主车辆配送平台的情况下,可以使用客户使用模式和/或乘车预约时间表来估计燃料补给之后的发动机操作。
51.另外,关于在燃料补给事件之后在高温(例如,由于暴露于阳光和/或热量)下的预计停放持续时间的信息可以用于确定燃料补给体积的减少。路线规划器和/或车辆行驶日志可以类似地用于预测车辆可能停放在何处以及停放多长时间。预计的发动机操作和停放持续时间可以应用于用于确认燃料补给体积是否要减少并估计体积减小的量值的预言性方法。
52.例如,从燃料蒸气滤罐中充分去除吸附的燃料蒸气(例如,去除至少95%的吸附蒸气)可能需要抽取300个床体积的空气,其中床体积是燃料蒸气滤罐的容积。作为示例,如果燃料蒸气滤罐的容积为3升,则需要900升空气流过燃料蒸气滤罐来使滤罐吸附剂再生。可以基于预计的发动机操作(例如,以提供抽取空气流量)、停放条件和燃料蒸气滤罐的使用年数来确定预测的滤罐穿透(pcb),如下面在等式1中所示。pcb可以提供对燃料补给事件(例如,将燃料箱重新填充到阈值体积)、然后是短驾驶循环和随后的车辆停放是否可能导致燃料蒸气从燃料蒸气滤罐逸出的估计。
53.pcb=x1(老化的滤罐负载 日间蒸气负载)-x2(预测的抽取空气)(1)
54.老化的滤罐负载可以基于燃料蒸气滤罐的最大装载容量(诸如滤罐的总容量的80%)乘以老化因子来确定,老化因子可以在1至1.25之间变化,这取决于滤罐的使用年数。例如,随着滤罐老化,老化因子可能增加,从而减小燃料蒸气滤罐的最大装载容量。可以如上所述利用车辆的预计停放条件(例如,当车辆熄火时)来估计日间蒸气负载。可以根据天气预报来预测车辆可能暴露的环境温度。另外,来自提供环境室车辆测试数据的数据库的信息可以用于推断由于环境温度的变化而产生的蒸气量。
55.可以如上所述例如基于在接收到对车辆的最终目的地的确认时的车辆行驶日志或根据从类似车辆报告并从数据库中检索的数据来确定预测的抽取空气。预期可用于对燃料蒸气滤罐进行抽取的总空气体积还可以取决于车辆类型,例如,停止/起动、hev、ice等。等式1中的变量x1和x2可以是加权因子以将pcb估计的输出归一化并提供单位转换(例如,滤罐负载的克数、抽取空气的升数)。
56.在获得pcb的值后,可以使用pcb值来确定是否需要调整燃料补给体积。在一个示例中,可以将pcb值与0进行比较。如果pcb等于或小于0,则可以认为不太可能有穿透排放并且不需要缓解措施。然而,如果pcb值大于0,则在停放事件期间燃料滤罐穿透的可能性增加。燃料补给的阈值水平可以降低到至少将pcb值减小到0的量。因此,通风阀(诸如图2的通风阀229)在燃料箱中的燃料水平达到调整后的阈值水平时可以关闭。通过关闭通风阀,在燃料箱中产生背压,从而致使分配装置关闭。
57.可以基于燃料水平与燃料蒸气滤罐装载量之间的关系来选择在燃料补给期间要添加到燃料箱的燃料量。例如,可以将诸如表1(如下所示)的表存储在控制器的存储器中,并且在确定pcb值时进行检索。
58.表1根据燃料蒸气滤罐装载量的示例性燃料箱燃料补给水平
[0059][0060]
表1将要添加到燃料箱的燃料量示出为燃料箱的最大容积相对于新滤罐的装载容量和老化的滤罐的装载容量的百分比。如上所述,可以根据新滤罐负载和老化因子来确定老化的滤罐负载。可以基于被确定为导致pcb为0或更小的老化的滤罐负载百分比来选择要添加的燃料量。例如,100%的老化的滤罐负载可以对应于pcb为0.5。将老化的滤罐负载减少到90%可以将pcb减小到0。因此,燃料箱可以被重新填充到燃料箱容积的80%(例如,对应于90%的滤罐负载)以减轻滤罐穿透。
[0061]
可以通过警报或通知向车辆用户通知燃料补给水平的推荐降低。在一个示例中,可以在车辆的人机界面(诸如仪表板用户界面)处提供警报。用户界面可以是例如被配置为显示消息并经由触摸接收用户输入的触摸屏。图3中示出了用户界面300的示例,所述用户界面可以包括在车辆(诸如具有图2的evap系统251的车辆)中。
[0062]
用户界面300可以包括基于来自车辆的燃料箱中的燃料水平传感器的信息的燃料水平通知302。例如,当燃料水平降低到阈值水平(诸如15%)并且急切需要燃料补给时,可以显示燃料水平通知302。然而,在其他示例中,阈值水平可以是低于燃料箱的最大体积容量的30%的各种值。
[0063]
用户可以在第一输入框304处输入车辆的未来目的地,这可以提示车辆控制器从车辆的行驶日志和/或提供来自其他车辆的路线信息的数据库中检索数据并评估目的地处的条件(例如,室内或室外车辆位置、环境温度等)。可以基于数据来估计发动机操作,并且可以基于老化的滤罐装载量和预计的日间蒸气来估计pcb值。如果pcb值大于零,则可以在用户界面300处显示调整燃料补给体积的请求。用户可以例如通过选择“是”来在第二输入框306处提供继续进行燃料补给调整的确认。替代地,用户可以在第三输入框308处拒绝建议的燃料补给调整,例如通过选择“否”。
[0064]
用于降低燃料蒸气滤罐穿透的可能性的第一方法400和用于调整车辆的燃料补给体积的第二方法500分别在图4和图5中示出。方法400和500可以在具有如图1所示的推进系统100和图2的车辆系统206的车辆中实现。例如,车辆可以是hev,具有停止/起动技术或vde,或者是常规的ice车辆。车辆可以包括用户界面,诸如图3的用户界面300。用于执行方法400和500的指令可以由控制器基于存储在控制器的存储器上的指令并且结合从发动机系统的传感器(诸如以上参考图1和图2描述的传感器)接收的信号来执行。根据以下描述的方法,控制器可以采用发动机系统的发动机致动器来调整发动机操作。
[0065]
首先转到图4,在402处,方法400包括估计和/或测量发动机工况。例如,可以基于来自踏板位置传感器(诸如图1的踏板位置传感器194)的信号来检测对扭矩的请求,车辆的燃料箱中的燃料水平可以由燃料水平传感器测量,燃料箱压力可以由压力传感器(诸如图2的压力传感器291)监测,滤罐负载可以通过滤罐负载传感器(诸如图2的滤罐负载传感器243)来测量。在404处,所述方法包括确认燃料箱中的燃料水平是否低于第一阈值。第一阈
值可以是燃料箱中剩余的使行程余量足以使车辆能够导航到燃料补给站的燃料量。例如,第一阈值可以是燃料箱的容积的10%。作为另一个示例,第一阈值可以是估计为50英里距离内的发动机操作提供动力的燃料量。作为另一个示例,第一阈值可以是动态值,其中第一阈值是基于到达最近的燃料补给站所需的燃料量。
[0066]
如果燃料水平处于或高于第一阈值,则所述方法包括在406处在当前状况下继续发动机操作。所述方法返回到开始。如果燃料水平低于第一阈值,则所述方法前进到407以激活燃料水平警报。例如,可以在车辆的仪表板上点亮低燃料指示灯。此外,可以在用户界面上显示通知。
[0067]
在408处,所述方法包括确认车辆的目的地。在一个示例中,可以从控制器的存储器中检索行驶日志,并将当前车辆路线与先前的驾驶循环进行比较。可以基于与过去行程的相似性来预测目的地,例如,车辆在过去多次导航到特定位置、在类似的当日时间或周中此日遵循相同的路线等。可以通过在用户界面处显示请求确认的消息来获得对来自用户的预测目的地的确认。作为另一个示例,可以根据车辆的gps系统上或与车辆的控制器局域网(can)总线无线链接或配对的移动装置上的映射位置来确定目的地。作为又一示例,可以通过在用户界面处显示请求目的地信息的提示来获得识别目的地的用户输入。
[0068]
在确认驾驶目的地时,所述方法包括在410处确定pcb值。确定pcb可以包括在412处估计老化的滤罐负载。可以基于燃料蒸气滤罐的最大装载容量(例如,制造商预定的最大装载量)和滤罐的老化因子来推断老化的滤罐负载。还可以通过在414处估计滤罐的日间蒸气负载来确定pcb值。可以基于车辆的目的地以及预计车辆在目的地停放多长时间(例如,由用户确认或输入)来预测日间蒸气负载。此外,可以结合环境室车辆测试数据使用天气预报,以推断可能影响滤罐处的蒸气产生的环境温度变化。
[0069]
另外,确定pcb值还可以包括在416处估计通过滤罐的抽取空气流量。在抽取事件期间,抽取空气可以通过通风管线(例如,图2的通风管线227)流入燃料蒸气滤罐中,所述通风管线将燃料蒸气滤罐流体地联接到大气。当发动机正在操作并且在发动机的进气歧管处产生真空时,可以打开通风阀(例如,图2的通风阀229)和抽取阀(例如,图2的抽取阀261)。可以基于目的地、车辆类型、来自先前行程的数据和/或从导航类似路线的具有类似动力传动系统的其他车辆获得的数据(例如,如从数据库中检索的)来推断预计的抽取空气量。
[0070]
预测的老化的滤罐负载、日间蒸气负载和抽取空气可以应用于等式1(如上所示)以估计pcb值。在418处,所述方法包括确认pcb值是否小于或等于0。如果pcb值小于或等于0,则所述方法前进到420以例如通过在用户界面处显示消息来指示:不需要调整燃料补给体积。替代地,可以不要求通知,并且可以在不进行调整的情况下进行燃料补给。然而,如果pcb值大于0,则所述方法继续进行到422以指示关于车辆在目的地的预期停放,滤罐穿透的可能性可能增加。例如,可以在用户界面处显示警报。方法400继续到图5处的方法500。
[0071]
在502处,方法500包括从用户获得要调整燃料补给体积的确认。例如,如图4所示,可以在用户界面处向用户请求用户输入以确认或拒绝基于pcb值对燃料补给体积进行调整。如果燃料补给调整被拒绝,例如,用户在用户界面处输入“否”,则所述方法继续前进到504以在不调整(例如,减少)要添加到燃料箱的燃料量的情况下继续进行未来的燃料补给事件(基于燃料箱达到最大容量的预期重新填充)。
[0072]
在一些示例中,燃料补给体积的调整可以自动发生,而无需用户确认。因此,可以
省略在502处获得确认,并且方法500可以直接前进到506。
[0073]
如果确认了燃料补给调整,例如,用户在用户界面处输入“是”,则所述方法包括在506处确认是否发起燃料补给事件。当燃料口或燃料舱口被解锁时或者当燃料箱盖被移除时,可以发起燃料补给事件。在其他示例中,当燃料分配泵插入燃料箱中时或者当燃料水平传感器在从燃料分配泵添加燃料时检测到燃料水平的变化时,可以发起燃料补给事件。如果未发起燃料补给事件,则所述方法返回到506以确认燃料补给事件的发起。如果发起燃料补给事件,则所述方法继续进行到508以确定调整后的燃料补给体积(关于将燃料箱重新填充到最大容量)。
[0074]
可以通过参考存储在控制器的存储器中的查找表(诸如上面的表1)来估计调整后的(例如经减少的)燃料补给体积。如上所述,表可以将燃料补给水平提供为对应于预测的老化的滤罐负载的最大燃料箱容量的百分比。例如,如果将老化的滤罐负载从90%减少到70%导致pcb值从高于0的值减小到零,则老化的滤罐负载的减少可以对应于将燃料补给体积减少到燃料箱容量的最大80%。
[0075]
在510处,所述方法包括确认燃料水平是否达到(例如,等于)第二阈值。第二阈值是大于燃料箱中的当前燃料水平/体积的燃料水平或体积,并且可以对应于在508处估计的调整后的燃料补给体积。如果燃料水平未达到第二阈值,则所述方法返回到510以继续通过例如燃料水平传感器来监测燃料水平。如果燃料水平确实达到第二阈值,则所述方法前进到512以命令关闭通风阀。在燃料补给期间关闭通风阀可能在燃料箱中产生背压,从而在检测到背压时导致燃料分配泵关闭。所述方法结束。
[0076]
引起在车辆中实现自适应燃料补给调整的evap系统操作和参数的示例在图6中在图表600处示出。车辆可以包括图2的evap系统251。图表600在曲线602处描绘了车辆的燃料箱中的燃料水平,在曲线604处描绘了燃料水平警报的状态,在曲线606处描绘了燃料蒸气滤罐通风管线中的通风阀的状态,以及在曲线608处描绘了燃料蒸气滤罐的装载量。水平轴线表示时间,其中时间从左向右增加。对于曲线602,燃料水平沿着y轴增加并且包括表示燃料箱的最大体积容量的第一阈值610、表示燃料水平警报被触发时的燃料水平警报阈值的第二阈值612、以及表示燃料箱的低于第一阈值610的调整后的最大体积容量的第三阈值614。在曲线604中,燃料水平警报沿着y轴在关闭与打开之间变化,并且在曲线606中,通风阀沿着y轴在关闭与打开之间变化。对于曲线608,燃料蒸气滤罐的装载量沿着y轴增加,并且包括表示燃料蒸气滤罐的最大负载容量的第四阈值616。
[0077]
在t0处,车辆发动机正在操作并且燃料水平(曲线602)高于第二阈值612。在发动机操作期间,燃料水平警报(曲线604)关闭并且通风阀(曲线606)打开以实现燃料蒸气滤罐的抽取。燃料蒸气滤罐负载(曲线608)随着燃料蒸气滤罐被抽取而减小。
[0078]
在t1处,燃料水平降低到第二阈值612。作为响应,激活燃料水平警报以向用户通知燃料箱的低燃料状态。通风阀保持打开,直到发动机在t1与t2之间关闭,此时通风阀关闭。燃料蒸气滤罐负载减小,直到通风阀关闭。
[0079]
在t2处,例如通过将燃料分配装置插入燃料箱的喷嘴中来指示燃料补给事件。例如,可以通知车辆控制器即将向燃料箱中分配燃料。响应于燃料补给事件的指示,可以确定pcb,如上所述。将pcb与阈值(例如,零)进行比较。例如,pcb可以大于零,并且可以执行自适应燃料补给调整。随着燃料补给的进行,燃料水平增加并且通风阀打开以减轻燃料箱中的
背压。当燃料箱中产生燃料蒸气时,蒸气被排放到燃料蒸气滤罐,并且燃料蒸气滤罐负载上升。
[0080]
在t3处,燃料水平达到第三阈值614,如基于自适应燃料补给调整所确定的。在燃料水平达到第三阈值614之前略微关闭通风阀以减小滞后效应。在关闭通风阀之后,在燃料箱中产生背压,从而导致燃料分配装置停止分配燃料。燃料蒸气负载停止上升并保持低于第四阈值616。
[0081]
以这种方式,可以在车辆的燃料补给事件之后减少燃料蒸气滤罐穿透。特定地,可以通过调整在燃料补给事件期间分配的燃料量来降低燃料蒸气从滤罐逸出的可能性,即使在短驾驶循环之后在波动的环境温度下车辆关闭一段时间也是如此。调整后的燃料量可以对应于在车辆的燃料箱中测量的降低的最大燃料水平,其中降低的最大燃料水平是基于pcb值确定的。可以通过预测在燃料补给后驾驶循环期间的老化的滤罐负载、日间蒸气负载和可用的抽取空气量来估计pcb。所述预测可以依赖于车辆控制器与可无线访问的数据平台之间的无线连接以及先前车辆行驶的日志。通过根据pcb值调整所分配的燃料量,缓解了来自车辆的evap系统的排放物的逸出。
[0082]
响应于预测的燃料蒸气滤罐穿透而调整燃料补给体积的技术效果是避免燃料蒸气滤罐的装载量超过饱和,从而减少车辆关闭时段期间的车辆排放。
[0083]
本公开还提供了对一种方法的支持,所述方法包括:
[0084]
在燃料补给事件期间通过增加燃料箱中的背压来停止向所述燃料箱分配燃料,所述燃料分配的所述停止是基于即将到来的燃料蒸气滤罐抽取事件和估计的燃料蒸气滤罐装载容量中的一者或多者。在方法的第一示例中,基于即将到来的燃料蒸气滤罐抽取事件来停止燃料分配包括预测燃料补给事件之后的发动机操作持续时间。在方法的第二示例(其任选地包括第一示例)中,预测发动机操作持续时间包括参考车辆行驶日志、驾驶目的地和车辆推进类型中的一者或多者,并且其中参考车辆推进类型包括确认车辆是否是混合动力电动车辆、实现起停技术的车辆、具有可变排量发动机的车辆和内燃发动机车辆中的一者。在方法的第三示例(其任选地包括第一示例和第二示例)中,基于估计的燃料蒸气滤罐装载容量来停止燃料分配包括:基于燃料蒸气滤罐的使用年数来预测燃料蒸气滤罐的装载容量。在方法的第四示例(其任选地包括第一示例至第三示例)中,基于估计的燃料蒸气滤罐装载容量来停止燃料分配还包括:估计燃料蒸气滤罐的日间蒸气装载量。在方法的第五示例(其任选地包括第一示例至第四示例)中,估计日间蒸气装载量包括预测在燃料补给事件之后车辆关闭时段的持续时间并预计车辆关闭时段期间的环境温度。在方法的第六示例(其任选地包括第一示例至第五示例)中,估计日间蒸气装载量还包括:检索环境室车辆测试数据以估计由于环境温度的变化而在燃料蒸气滤罐中产生的蒸气量。在方法的第七示例(其任选地包括第一示例至第六示例)中,停止燃料的分配包括当预测到燃料补给事件之后的即将到来的车辆关闭时段内的滤罐穿透时,相对于燃料箱的最大体积容量减少燃料量。在方法的第八示例(其任选地包括第一示例至第七示例)中,增加燃料箱中的背压包括在燃料补给事件期间关闭燃料蒸气滤罐的通风管线中的通风阀。
[0085]
本公开还提供了对一种用于车辆的方法的支持,所述方法包括:响应于在燃料补给事件之后车辆的预计的车辆关闭时段,基于估计的燃料蒸气滤罐装载容量、估计的日间蒸气负载和燃料蒸气滤罐处的估计的抽取空气流量中的一者或多者,确定预测的滤罐穿
透;以及响应于估计预测的滤罐穿透的值超过阈值,而调整在燃料补给事件期间分配到燃料箱的燃料量。在方法的第一示例中,基于估计的抽取空气流量来确定预测的滤罐穿透包括以下中的一者或多者:从车辆的行程日志中检索数据以及从提供来自导航类似路线的具类似动力传动系统的车辆的数据的数据库中检索数据。在方法的第二示例(其任选地包括第一示例)中,确定预测的滤罐穿透包括当预测的滤罐穿透的值大于阈值时指示在预计的车辆关闭时段期间滤罐穿透的可能性增加。在方法的第三示例(其任选地包括第一示例和第二示例)中,确定预测的滤罐穿透的值包括当预测的滤罐穿透的值等于或小于阈值时不调整分配到燃料箱的燃料量。在方法的第四示例(其任选地包括第一示例至第三示例)中,调整分配给燃料箱的燃料量包括根据预期燃料装载容量将预测的滤罐穿透的值减小到阈值而确定燃料水平阈值减小。在方法的第五示例(其任选地包括第一示例至第四示例)中,调整到燃料箱的燃料量还包括关闭被配置为将燃料蒸气滤罐流体地联接到大气的通风管线中的阀,并且其中关闭阀包括当燃料水平达到降低的燃料水平阈值时阻挡燃料蒸气滤罐与大气之间的流动。在方法的第六示例(其任选地包括第一示例至第五示例)中,当燃料水平在燃料补给事件期间达到降低的燃料水平阈值时,关闭阀致使燃料箱中的压力增加,并且其中压力的增加致使向燃料箱分配燃料的装置关闭。
[0086]
本公开还提供了对用于车辆的蒸发排放控制(evap)系统的支持,所述系统包括:燃料箱;燃料蒸气滤罐,其流体地联接到燃料箱并且被配置为在燃料补给事件期间从燃料箱接收燃料蒸气;阀,其布置在燃料蒸气滤罐的通风管线中;以及控制器,其具有存储在非暂时性存储器上的计算机可读指令,所述计算机可读指令在燃料补给事件期间执行时使控制器:
[0087]
在所述燃料补给事件期间基于即将到来的燃料蒸气滤罐抽取事件和估计的燃料蒸气滤罐装载容量中的一者或多者来停止向所述燃料箱分配燃料。在系统的第一示例中,估计的燃料蒸气滤罐装载容量是基于燃料蒸气滤罐的使用年数和在燃料补给事件之后车辆的车辆关闭时段期间燃料蒸气滤罐中的预计日间蒸气产生量来确定的。在系统的第二示例(其任选地包括第一示例)中,即将到来的燃料蒸气滤罐抽取事件和估计的燃料蒸气滤罐装载容量中的一者或多者用于确定预测的滤罐穿透值,并且其中当预测的滤罐穿透值超过阈值时分配给燃料箱的燃料量减小。在系统的第三示例(其任选地包括第一示例和第二示例)中,当预测的滤罐穿透值超过阈值时,在将燃料箱填充到燃料箱的最大容量之前关闭阀。
[0088]
在另一种表示中,一种用于车辆的方法包括基于预期的滤罐穿透来减少在燃料补给期间分配到车辆燃料箱的燃料量。在方法的第一示例中,减少燃料量包括监测燃料箱中的燃料水平直到燃料水平达到降低的阈值,以及当燃料水平达到降低的阈值时关闭燃料蒸气滤罐通风管线的通风阀。方法的第二示例任选地包括第一示例,并且还包括,其中减小的阈值是燃料箱中相对于燃料箱的最大体积容量的减小的燃料体积。方法的第三示例任选地包括第一示例和第二示例中的一者或多者,并且还包括:其中基于预期的滤罐穿透而减少燃料量包括利用存储在云服务器上的数据库、车辆行驶日志和车辆测试数据中的一者或多者来估计预期的滤罐穿透的值。
[0089]
应当注意,本文所包括的示例性控制和估计例程可以与各种发动机和/或车辆系统配置一起使用。本文公开的控制方法和例程可以作为可执行指令存储在非暂时性存储器
中,并且可以由包括控制器的控制系统结合各种传感器、致动器和其他发动机硬件来执行。本文所述的具体例程可表示任何数目的处理策略(诸如事件驱动的、中断驱动的、多任务的、多线程的等)中的一个或多个。因此,所示的各种动作、操作和/或功能可以按所示的顺序执行、并行执行,或者在一些情况下被省略。同样,处理顺序不一定是实现本文描述的示例性实施例的特征和优点所必需的,而是为了便于说明和描述而提供。可以根据所使用的特定策略重复执行所示动作、操作和/或功能中的一者或多者。此外,所述动作、操作和/或功能可以图形地表示被编程到发动机控制系统中的计算机可读储存介质的非暂时性存储器中的代码,其中所述动作通过结合电子控制器执行包括各种发动机硬件部件的系统中的指令来执行。
[0090]
应了解,本文中公开的配置和例程本质上是示例性的,并且这些具体实施例不应被视为具有限制性含义,因为众多变化是可能的。例如,上述技术可以应用于v-6、i-4、i-6、v-12、对置4缸以及其他发动机类型。本公开的主题包括本文公开的各种系统和配置以及其他特征、功能和/或性质的所有新颖的和非显而易见的组合和子组合。
[0091]
所附权利要求特别地指出被视为新颖且非显而易见的某些组合和子组合。这些权利要求可指代“一个”要素或“第一”要素或其等同物。这些权利要求应理解为包括一个或多个此类要素的结合,既不要求也不排除两个或更多个此类要素。所公开特征、功能、元件和/或性质的其他组合和子组合可通过修正本权利要求或通过在此申请或相关申请中呈现新的权利要求来要求保护。此类权利要求与原始权利要求相比无论在范围上更宽、更窄、等同或不同,也都被视为包括在本公开的主题内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。