技术特征:
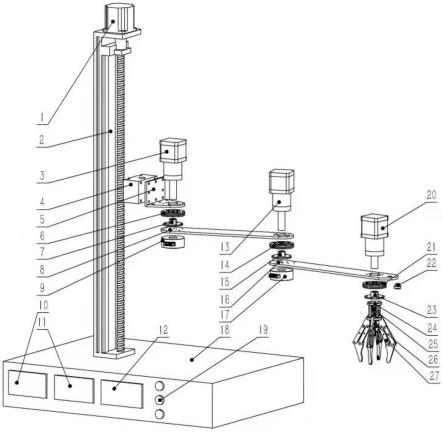
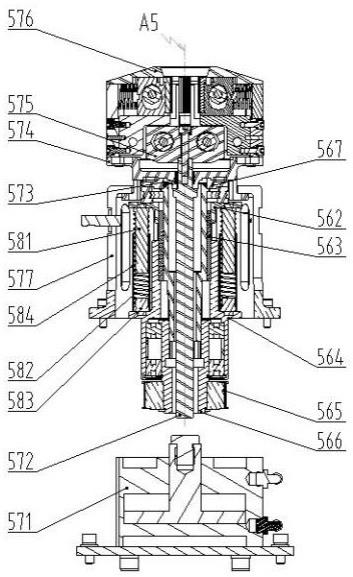
1.一种基于机器视觉的分拣机械手,其特征在于,包括升降驱动机构、安装座、第一旋转驱动机构、第一机械臂、第二旋转驱动机构、第二机械臂、手抓夹具组件和控制器,所述安装座可升降地安装在所述升降驱动机构上,所述第一旋转驱动机构安装在所述安装座上,所述第一旋转驱动机构与所述第一机械臂的第一端传动连接,以驱动所述第一机械臂旋转;所述第二旋转驱动机构安装在所述第一机械臂的第二端,所述第二旋转驱动机构与所述第二机械臂的第一端传动连接,以驱动所述第二机械臂旋转;所述手抓夹具组件安装在所述第二机械臂的第二端,所述手抓夹具组件包括摄像头;所述第一机械臂的第一端安装有第一角度编码器,所述第二机械臂的第一端安装有第二角度编码器;所述第一旋转驱动机构、所述第一角度编码器均与所述控制器电连接;所述第二旋转驱动机构、所述第二角度编码器均与所述控制器电连接。2.根据权利要求1所述的基于机器视觉的分拣机械手,其特征在于,所述第一旋转驱动机构包括第一驱动电机、第一轴承和第一连接法兰,所述第一驱动电机安装在所述安装座上,所述第一轴承安装在所述安装座的下方,所述第一连接法兰的一端与所述第一轴承连接,所述第一机械臂的第一端安装在所述第一连接法兰的另一端,所述第一驱动电机的电机输出轴依次穿过所述安装座、所述第一轴承、所述第一连接法兰和所述第一机械臂插入所述第一角度编码器内。3.根据权利要求2所述的基于机器视觉的分拣机械手,其特征在于,所述第一驱动电机为减速步进电机,所述第一轴承为交叉滚子轴承。4.根据权利要求1-3任一项所述的基于机器视觉的分拣机械手,其特征在于,所述第二旋转驱动机构包括第二驱动电机、第二轴承和第二连接法兰,所述第二驱动电机安装在所述第一机械臂的第二端,所述第二轴承安装在所述第一机械臂的第二端的下方,所述第二连接法兰的一端与所述第二轴承连接,所述第二机械臂的第一端安装在所述第二连接法兰的另一端,所述第二驱动电机的电机输出轴依次穿过所述第一机械臂、所述第二轴承、所述第二连接法兰和所述第二机械臂插入所述第二角度编码器内。5.根据权利要求4所述的基于机器视觉的分拣机械手,其特征在于,所述第二驱动电机为减速步进电机,所述第二轴承为交叉滚子轴承。6.根据权利要求1所述的基于机器视觉的分拣机械手,其特征在于,所述手抓夹具组件还包括第三旋转驱动机构和手抓组件,所述第三旋转驱动机构安装在所述第二机械臂的第二端,所述手抓组件安装在所述第二机械臂的第二端的下方,所述第三旋转驱动机构与所述手抓组件传动连接,以驱动所述手抓组件旋转;所述手抓组件包括手抓开合驱动机构和多个手抓开合臂,多个所述手抓开合臂沿所述手抓开合驱动机构的周向间隔布置,所述手抓开合驱动机构与多个所述手抓开合臂传动连接,以驱动各个所述手抓开合臂运动,使得多个所述手抓开合臂的底端分散或汇集。7.根据权利要求6所述的基于机器视觉的分拣机械手,其特征在于,所述第三旋转驱动机构包括第三驱动电机、第三轴承和第三连接法兰,所述第三驱动电机安装在所述第二机械臂的第二端,所述第三轴承安装在所述第二机械臂的第二端的下方,所述第三连接法兰的一端与所述第三轴承连接,所述手抓开合驱动机构安装在所述第三连接法兰的另一端,所述第三驱动电机的电机输出轴依次穿过所述第二机械臂、所述第三轴承、所述第三连接法兰安装在所述手抓组件内。
8.根据权利要求7所述的基于机器视觉的分拣机械手,其特征在于,所述第三驱动电机为减速步进电机,所述第三轴承为交叉滚子轴承。9.根据权利要求6所述的基于机器视觉的分拣机械手,其特征在于,所述手抓开合驱动机构包括第四驱动电机、手抓开合运动丝杠、连接块和多个连接件,所述第四驱动电机安装在所述第三旋转驱动机构的下方,所述第四驱动电机与所述手抓开合运动丝杠传动连接,以驱动所述手抓开合运动丝杠转动;所述连接块螺纹装配在所述手抓开合运动丝杠,每个所述连接件的一端均铰接在所述连接块上,每个所述连接件的另一端各铰接一个所述手抓开合臂。10.根据权利要求9所述的基于机器视觉的分拣机械手,其特征在于,所述手抓开合臂包括第一连接臂、第二连接臂和第三连接臂,所述第一连接臂的一端与所述第四驱动电机固定,所述第一连接臂的另一端与所述第二连接臂的一端铰接,所述第二连接臂的另一端与所述第三连接臂铰接,所述连接件铰接在所述第二连接臂上,所述第三连接臂的底端设置有卡齿。
技术总结
本实用新型涉及分拣设备技术领域,公开了一种基于机器视觉的分拣机械手,包括升降驱动机构、安装座、第一旋转驱动机构、第一机械臂、第二旋转驱动机构、第二机械臂、手抓夹具组件和控制器,第一旋转驱动机构与第一机械臂的第一端传动连接;第二旋转驱动机构安装在第一机械臂的第二端,第二旋转驱动机构与第二机械臂的第一端传动连接;手抓夹具组件安装在第二机械臂的第二端;第一机械臂的第一端安装有第一角度编码器,第二机械臂的第一端安装有第二角度编码器;第一旋转驱动机构、第一角度编码器、第二旋转驱动机构、第二角度编码器均与控制器电连接。本实用新型中可对第一机械臂、第二机械臂的旋转角度精确控制,便于准确地分拣夹取零件。零件。零件。
技术研发人员:林静 李明霖 成晓枫 贾炜杰 梁剑斌 夏茹
受保护的技术使用者:茂名职业技术学院
技术研发日:2022.01.26
技术公布日:2022/8/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。