技术特征:
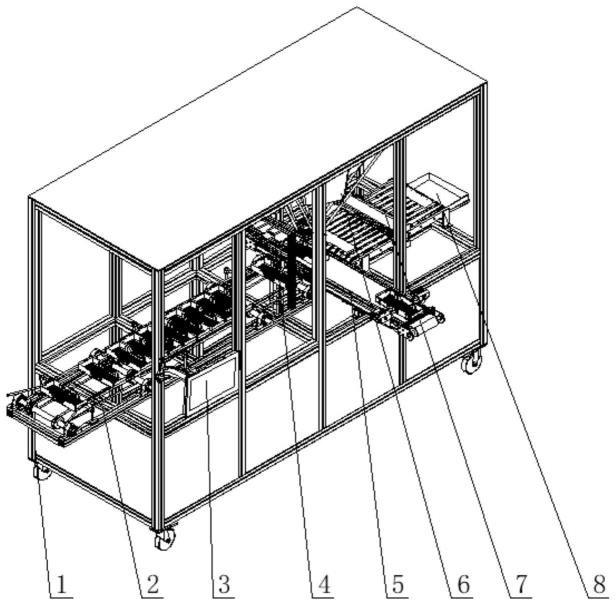
1.一种全自动引线框架和纸板视觉识别系统,其特征在于,包括框架(1),框架(1)内设有:识别机构(4),用于识别不同型号的引线框架(15)和纸板(24),并获取引线框架(15)和纸板(24)的位置信息;总传输机构,用于将物料传输至识别机构(4)的识别区域内;分拣机构,用于将引线框架(15)和纸板(24)进行分拣;分传输机构,用于将分拣后的引线框架(15)和纸板(24)分别传输至相对应的下一工作位置;工控机(3),用于接收并处理识别机构(4)发送的信号,并控制分拣机构、分传输机构动作。2.根据权利要求1所述的全自动引线框架和纸板视觉识别系统,其特征在于:所述识别机构(4)包括俯视相机组件(11)和侧视相机组件(9);其中俯视相机组件(11)位于总传输机构上方,侧视相机组件(9)位于总传输机构末端,侧视相机组件(9)为双目相机。3.根据权利要求1所述的全自动引线框架和纸板视觉识别系统,其特征在于:所述总传输机构包括v带输送机(2),v带输送机(2)用于输送物料盒(14);v带输送机(2)末端设有v带输送机挡料板(10)。4.根据权利要求3所述的全自动引线框架和纸板视觉识别系统,其特征在于:所述v带输送机(2)分为若干段。5.根据权利要求1所述的全自动引线框架和纸板视觉识别系统,其特征在于:所述分拣机构包括分拣机器人(6),分拣机器人(6)通过吸具吸取后将物料放置到相应的的分传输机构上。6.根据权利要求1所述的全自动引线框架和纸板视觉识别系统,其特征在于:所述分传输机构包括废料传输机构和纸板传输机构;废料传输机构包括皮带输送机(5),皮带输送机(5)用于输送盛装引线框架(15)的废料盒(32)至码垛位置,皮带输送机(5)末端设有对中装置(30)和皮带输送机挡料板(29);纸板传输机构包括纸板输送机(23),纸板输送机(23)用于输送纸板(24)至纸板收料盘(8)所在位置,纸板输送机(23)上设有除尘机构(7)。7.根据权利要求6所述的全自动引线框架和纸板视觉识别系统,其特征在于:所述除尘机构(7)包括静电除尘组件(26),静电除尘组件(26)包括两个集尘胶卷(28),两个集尘胶卷(28)分别置于纸板输送机(23)上方和下方,两个集尘胶卷(28)与纸板输送机(23)之间皆设有胶辊(27)。8.一种全自动引线框架和纸板视觉识别系统控制方法,应用于权利要求1-7任一所述的视觉识别系统,其特征在于,具体包括如下步骤:s1:系统启动,v带输送机(2)将物料盒(14)输送至v带输送机(2)末端待分拣位置,物料盒(14)中为待分拣的引线框架(15)和纸板(24);s2:识别机构(4)对物料盒(14)中的引线框架(15)和纸板(24)均进行类型识别与位置信息获取;s3:识别机构(4)发送信号至工控机(3),工控机(3)接收并处理信号,而后工控机(3)根据物料的不同类型控制分拣机器人(6)进行相应动作;
s4:根据工控机(3)的指令,分拣机器人(6)移动到相应工作位置,而后分拣机器人(6)上的吸具打开相应宽度后对引线框架(15)或纸板(24)进行吸取;s5:分拣机器人(6)将引线框架(15)放置于皮带输送机(5)上的废料盒(32)内,将纸板(24)放置于纸板输送机(23)上;s6:待废料盒(32)盛装完毕,工控机(3)控制皮带输送机(5)启动运转,将废料盒输送至皮带输送(5)末端待码垛位置;当识别机构(4)识别到纸板(24),工控机(3)控制纸板输送机(23)启动运转,将纸板(24)经过除尘机构(7)除尘后输送至纸板收料盘(8)。9.根据权利要求8所述的全自动引线框架和纸板视觉识别系统控制方法,其特征在于:所述s2中,识别机构(4)进行的类型识别能够具体到对两类物料各自的不同型号进行识别,识别机构(4)获取的位置信息包括物料xy方向位置信息和物料高度位置信息;所述s2中,识别机构(4)进行的类型识别能够具体到对两类物料各自的不同型号进行识别,识别机构(4)获取的位置信息包括物料xy方向位置信息和物料高度位置信息;其中,物料类型识别和xy方向位置信息获取通过俯视相机组件(11)实现,具体包括如下子步骤:s21-1:相机进行拍摄,获取到图像;s21-2:将图像转灰度图后进行形态学处理,再通过阈值和面积判断,最终识别出物料类型和xy方向位置信息;s21-3:将s21-2中的类型及位置信息发送至工控机(3);物料高度位置信息获取通过侧视相机组件(9)实现,具体包括如下子步骤:s22-1:建立相机参数,通过相机标定算法计算出内外参,以消除摄像头径向畸变和切向畸变的影响;s22-2:双目矫正与匹配,利用内外参对双目相机拍摄的两个视图进行消除畸变和行对准,使得两个视图的成像坐标原点一致、两摄像头光轴平行、两视图成像平面共面、对极线行对齐;s22-3:计算深度信息,利用深度学习目标检测算法对双目相机中某个摄像头获取的视图深色区域进行识别和标定,得到目标检测框,而后通过立体匹配方法对该视图进行视差计算,根据视差到深度的转换关系得到目标的深度信息;s22-4:计算高度信息,利用目标的深度信息对目标检测框的顶边及底边进行矫正,精确框定目标得到图像坐标系,而后利用图像坐标系到相机坐标系、相机坐标系再到世界坐标系的转换关系计算目标高度信息。10.根据权利要求8所述的全自动引线框架和纸板视觉识别系统控制方法,其特征在于:所述s6中,废料盒(32)盛装完毕的判断是由识别机构(4)实现的,具体为当俯视相机组件(11)检测到v带输送机(2)末端的物料盒(14)状态为空,即代表皮带输送机(5)上的废料盒(32)盛装完毕。
技术总结
本发明提供了一种全自动引线框架和纸板视觉识别系统及其控制方法,属于半导体封装行业人工智能技术领域。全自动引线框架和纸板视觉识别系统,包括框架,框架内设有识别机构、总传输机构、分拣机构、分传输机构和工控机;本发明用机器人智能分拣代替操作员人工分拣与除尘,在有效节省人力和劳动强度的同时保证了分拣准确率,并提高了分拣效率。应用于上述系统的控制方法,通过相机组件多角度、全方位的拍摄物料图像,并通过图像识别和深度学习算法识别出物料类型以及获取到物料位置信息;进一步的,对于分拣后的两种物料分开传输、各自处理,实现了流水线功能,节省了人工与时间成本。节省了人工与时间成本。
技术研发人员:张海滨 张兰香 王坤
受保护的技术使用者:新恒汇电子股份有限公司
技术研发日:2022.08.03
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。