1.本发明属于海洋参数估计技术领域,具体地说,尤其涉及一种基于跨时空声速剖面聚类的声速分布快速估计方法。
背景技术:
2.现有的水下声速剖面分布估计方法,通常利用现场实测声场、温度场、盐度场数据作为输入参考信息估计区域声速剖面分布情况,可以获得目标区域较为精确的声速剖面分布估计,但是由于需要进行现场数据测量工作,因此仍不能实时给出目标区域声速估计结果。
3.tolstoy等提出一种基于匹配场处理的声速剖面反演方法,该方法结合射线追踪理论与正交经验函数分解,通过匹配场处理技术,搜索候选声速剖面,使其模拟的理论信号传播时间与实测值误差最小,从而确定声速剖面估计值,能够较为精确的拟合实际声速剖面,但该方法匹配项确定过程复杂度较高,反演算法时间效率低。艾锐峰等提出一种基于神经网络的声速剖面反演方法,将正交经验函数分解系数、海表温度等特征作为神经网络的输入,对海区垂直声速剖面进行反演,与基于匹配场处理的声速剖面反演方法相比,在保持同等精度量级的情况下能够有效减小声速反演估计的计算时间开销。李博等提出了一种联合卷积循环神经网络和历史海区垂直温、盐数据预测未来海区温、盐数据的方法,该方法结合了历史海域的温、盐数据对目标区域温、盐数据进行了预测,再利用声速经验公式将温、盐、深数据转化为声速剖面,该方法同样具有算法时间开销小的优势,但对数据源种类要求较高。huang等提出一种综合优化的自适应神经网络声速剖面反演方法,将时间、地点、深度信息作为神经网络输入反演声速剖面,相比于基础神经网络进行声速反演的方法,其反演的声速剖面精度更高。
4.总体来说,上述声速剖面反演方法均在声速反演时利用现场实测声场、温度场、盐度场数据作为输入参考信息估计区域声速剖面分布情况,可以获得目标区域较为精确的声速剖面分布估计,但是由于需要进行现场数据测量工作,因此仍不能实时给出目标区域声速估计结果。
技术实现要素:
5.本发明的目的在于提供一种基于跨时空声速剖面聚类的声速分布快速估计方法,以弥补现有技术的不足。
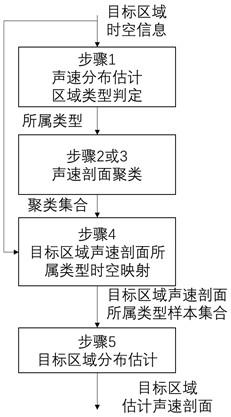
6.为达到上述的目的,本发明采取的具体技术方案为:一种基于跨时空声速剖面聚类的声速分布快速估计方法,包括以下步骤:s1:首先判定声速分布估计区域的类型:根据目标区域所处纬度,分为存在表面层区域和无表面层区域;s2:对含表面层区域进行历史声速剖面数据样本聚类,得到存在表面层区域声速剖面聚类集合;
s3:对无表面层区域进行历史声速剖面数据样本聚类,得到无表面层区域声速剖面聚类集合;s4: 对目标区域声速剖面所属类型进行时空映射,采用k邻近算法判断目标区域声速剖面所属类型,获得目标区域声速剖面所属类型估计输出;s5:目标区域声速剖面分布估计:以目标区域声速剖面所属类型估计输出中声速剖面样本平均值作为目标区域声速剖面分布估计。
7.进一步的,所述s1具体为:s1-1:根据目标区域所处纬度l,将任务分为存在表面层区域,即其纬度范围为赤道0
°
到北纬50
°
或南纬50
°
之间,即或;若目标区域为存在表面层区域,按照纬度确定表面层与主跃层分层深度ds: (1);若无表面层区域,即其纬度大于北纬或南纬50
°
,即或,其中n表示北纬,s表示南纬。
8.进一步的,所述s2具体为:历史声速剖面数据样本来源于赤道0
°
到北纬50
°
或南纬50
°
之间,所述历史声速剖面数据样本总数为i,集合表示为,其中第i个声速剖面样本为,d为深度,单位为米;表面层负梯度参考声速剖面为;s2-1:初始化初始化表面层负梯度声速剖面集合,表面层正梯度声速剖面集合,声速剖面样本的欧式距离矩阵,候选声速剖面聚类中心集合,邻居声速剖面集合,声速剖面聚类集合;s2-2:相关性检验分类对中的声速剖面数据样本进行表面层深度区间部分截取,表示为,计算其与参考声速剖面样本之间的相关系数:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中为参考声速剖面表面层平均声速值,是经验声速剖面表面层平均声速值;如果,则将声速剖面数据样本加入到表面层负梯度声速剖面集合,否则将声速剖面数据样本加入到表面
层正梯度声速剖面集合;s2-3:局部密度聚类分别对表面层负梯度声速剖面集合,和表面层正梯度声速剖面集合,进行局部密度聚类;令候选声速剖面聚类中心集合,并在此集合标记声速剖面样本为,计算声速剖面样本与声速剖面样本之间的欧式距离:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)将欧式距离计算结果存入声速剖面样本的欧式距离矩阵;如果,循环执行:随机选择声速剖面样本,重置;遍历每一个声速剖面样本,查询中与的欧氏距离,如果欧式距离小于预设欧氏距离密度阈值,即,则将声速剖面样本加入到邻居声速剖面集合,如果遍历每一个声速剖面样本后元素个数大于等于预设邻居数量阈值,即,则在声速剖面聚类集合中创建新聚类集合元素,同时在中剔除中的共有元素,否则从中剔除;令候选声速剖面聚类中心集合,将a替换为b,-替换为 ,聚类集合替换为,重复执行s2过程s2-3,得到存在表面层区域声速剖面聚类集合。
9.进一步的,所述s3具体为:历史声速剖面数据样本来源于北纬50
°
到北极或南纬50
°
到南极之间;历史声速剖面数据样本总数为j,集合表示为其中第j个声速剖面样本为,d为深度,单位为米;s3-1:初始化初始化声速剖面样本的欧式距离矩阵,候选声速剖面聚类中心集合,邻居声速剖面集合,声速剖面聚类集合;s3-2:局部密度聚类令候选声速剖面聚类中心集合,并在此集合标记声速剖面样本为,计算声速剖面样本
与声速剖面样本之间的欧式距离:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)将欧式距离计算结果存入声速剖面样本的欧式距离矩阵;如果,循环执行:随机选择声速剖面样本,重置;遍历每一个声速剖面样本,查询中与的欧氏距离,如果欧式距离小于预设欧氏距离密度阈值,即,则将声速剖面样本加入到邻居声速剖面集合,如果遍历每一个声速剖面样本后元素个数大于等于预设邻居数量阈值,即,则在声速剖面聚类集合中创建新聚类集合元素,同时在中剔除中的共有元素,否则从中剔除;获得无表面层区域声速剖面聚类集合。
10.进一步的,所述s4具体为:根据目标任务纬度值l所在区间,声速分布估计目标区域的时空信息,其中时间信息均以“天”为单位,编码由每年1月1日开始为“1”,每日递增1个单位,12月31日为“365”,闰年2月29日与28日编码相同,为“59”;空间信息以经纬度进行度量,单位为度;如果目标区域为含表面层区域,历史声速剖面数据,存在表面层区域声速剖面聚类集合,历史声速剖面数据样本采样时空信息;如果目标区域为无表面层区域,历史声速剖面数据,无表面层区域声速剖面聚类集合,历史声速剖面数据样本采样时空信息。
11.以k邻近算法判断目标区域声速剖面所属类型。
12.s4-1:存在表面层目标区域声速剖面所属类型归类:(1)时空信息距离计算
计算声速分布估计目标区域与历史声速剖面样本采样时空信息距离:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中是时间距离,是空间距离,为权重参数平衡时空信息占比。时间距离计算依据: (6)空间距离计算依据:(7)其中当坐标位于北半球时,,位于南半球时,,经度编码方式定义为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)其中是坐标点编码前的原始经度;(2)所属类型映射对时空信息距离由小到大排序;选择k个与声速分布估计目标区域具有最短时空距离的历史声速剖面数据样本,根据此k个历史声速剖面数据样本中多数声速剖面样本所属的声速剖面类别作为目标区域声速剖面所属类型估计输出,记作。
13.s4-2:无表面层目标区域声速剖面所属类型归类:(1)时空信息距离计算计算声速分布估计目标区域与历史声速剖面样本采样时空信息距离:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)其中是时间距离,是空间距离,为权重参数平衡时空信息占比。时间距离计算依据:(10)空间距离计算依据:(11)其中当坐标位于北半球时,,位于南半球时,,经度编码方式定义为:
(12)其中是坐标点编码前的原始经度;(2)所属类型映射对时空信息距离由小到大排序;选择个与声速分布估计目标区域具有最短时空距离的历史声速剖面数据样本,根据此个历史声速剖面数据样本中多数声速剖面样本所属的声速剖面类别作为目标区域声速剖面所属类型估计输出,记作。
14.与现有技术相比,本发明的优点和有益效果是:本发明解决了水下声速剖面分布的快速估计问题,缩短了目标区域水下声速分布估计时间开销,提高了水下声速分布估计实时性,以便水下定位导航授时系统提高水下测距、定位、导航与授时精度。
15.本发明提出的方法可以在无现场实测数据的情况下,仅利用声速估计任务的地点与时间信息(时空信息),完成对目标区域的声速剖面分布快速估计,尤其对于历史参考样本稀少的时空区间,通过跨时空声速剖面聚类,可利用其他时空区间中具有相似声速剖面分布特征的样本作为参考,完成对目标区域的声速剖面分布的快速估计。
16.本发明提出的方法相较于传统声速剖面反演方法,操作简便,大大减小了目标区域声速分布的时间开销。且随着水下声速场构建技术的发展,本发明能够广泛应用到水下通信、定位、导航、探测等以声波作为信号载体的应用系统中。
附图说明
17.图1是基于跨时空声速剖面聚类的声速分布快速估计方法示意图。
18.图2是含表面层地区历史声速剖面数据样本聚类示意图。
19.图3是无表面层地区历史声速剖面数据样本聚类示意图。
20.图4是2016年6月30日,西经141.711
°
,北纬30.996
°
采集的声速剖面样本分别根据时间参数聚类(30日范围)、距离参数聚类(10经、纬度范围)、基于跨时空声速剖面聚类(局部密度聚类)后的所属聚类样本分布示意图。
21.图5是根据时空信息对声速估计任务当前时空区域所属声速剖面类型进行映射的准确度结果图。
22.图6是在不同聚类准则和声速剖面估计任务当前时空区间所属类型映射准则情况下,以聚类平均声速剖面作为声速估计任务的声速分布估计结果,得到的平均声速分布估计误差以及方差区间分布图。
具体实施方式
23.下面结合实施例及附图对本发明所述的技术方案作进一步地描述说明。
24.实施例1该实施例是一种基于跨时空声速剖面聚类的声速分布快速估计方法,声速分布估计区域为北纬36.99
°
,西经123.29
°
,声速分布估计时间为2022年7月20日,具体实施如下:
步骤1:声速分布估计区域类型判定根据目标区域所处纬度,属于存在表面层区域,按照(1)式确定表面层与主跃层分层深度。
25.步骤2:含表面层区域声速分布聚类按照图2所示进行历史声速剖面数据样本聚类,历史声速剖面数据样本来源于赤道0
°
到北纬50
°
之间。历史声速剖面数据样本总数为i,集合表示为,其中第i个声速剖面样本为, d为深度,单位为米;表面层负梯度参考声速剖面为。
26.(1)初始化初始化表面层负梯度声速剖面集合,表面层正梯度声速剖面集合,声速剖面样本的欧式距离矩阵,候选声速剖面聚类中心集合,邻居声速剖面集合,声速剖面聚类集合。
27.(2)相关性检验分类对中的声速剖面数据样本进行表面层深度区间部分截取,表示为,依据(2)式计算其与参考声速剖面样本之间的相关系数。如果,则将声速剖面数据样本加入到表面层负梯度声速剖面集合,否则将声速剖面数据样本加入到表面层正梯度声速剖面集合。
28.(3)局部密度聚类分别对表面层负梯度声速剖面集合,和表面层正梯度声速剖面集合,进行局部密度聚类。
29.令候选声速剖面聚类中心集合,并在此集合标记声速剖面样本为,并在此集合标记声速剖面样本为按照(3)式计算声速剖面样本与声速剖面样本之间的欧式距离,将欧式距离计算结果存入声速剖面样本的欧式距离矩阵。
30.如果,循环执行:随机选择声速剖面样本,重置;遍历每一个声速剖面样本,查询中与的欧氏距离,如果欧式距离小于预设欧氏距离密度阈值,即,则将声速剖面样本加入到邻居声速剖面集合,如果遍历每一个声速剖面样本后元素个数大于等于预设邻居数量阈值,即,则在声速剖面聚类集合中创建新聚类集合元素,同时在中剔除中的共有元素,否则从
中剔除。
31.令候选声速剖面聚类中心集合,将a替换为b,-替换为 ,聚类集合替换为,重复执行步骤2过程(3),得到存在表面层区域声速剖面聚类集合,转入执行步骤4。
32.步骤3:无表面层区域声速分布聚类声速分布估计目标区域不属于无表面层区域,直接跳过步骤3,执行步骤4。
33.步骤4:目标区域声速剖面所属类型时空映射声速分布估计目标区域的编码时空信息。目标区域为含表面层区域,历史声速剖面数据,存在表面层区域声速剖面聚类集合,历史声速剖面数据样本采样时空信息。
34.以k=7时的邻近算法判断目标区域声速剖面所属类型,k=7。
35.(1)时空信息距离计算根据(5)式并以为权重参数平衡时空信息占比计算声速分布估计目标区域与历史声速剖面样本采样时空信息距离。根据(6)式计算时间距离,根据(7)式计算空间距离。
36.(2)所属类型映射对时空信息距离由小到大排序;选择7个与声速分布估计目标区域具有最短时空距离的历史声速剖面数据样本,根据此7个历史声速剖面数据样本中存在4个声速剖面样本所属的声速剖面类别为,以此作为目标区域声速剖面所属类型估计输出,记作。
37.步骤5:目标区域声速剖面分布估计以目标区域声速剖面所属类型估计输出中声速剖面样本平均值作为目标区域声速剖面分布估计。
38.结果分析:1、图4中,(a)为基于跨时空声速剖面聚类(局部密度聚类)后的聚类样本分布示意图、(b)为声速剖面样本分别根据时间参数聚类(30日范围)的聚类样本分布示意图、(c)为距离参数聚类(10经、纬度范围)的聚类样本分布示意图。图4 (b)结果可以看出,单纯采用时间参数聚类(30日范围),声速剖面分布类型包含多类,没有实现同类型声速剖面聚类;图4(c)结果中,单纯采用距离参数聚类(10经、纬度范围),声速剖面大致具有相似分布规律,曲线形状近似,但相比于图4 (a)跨时空声速剖面聚类(局部密度聚类)结果,图4 (c)结果在临近海面处与200米深度处表现出明显的声速值分布更分散,区间更宽;图4 (a)基于跨时空声速剖面聚类(局部密度聚类)结果在聚类类型内声速剖面声速值在各深度层分布,相比单纯采用时间参数聚类(30日范围)、单纯采用距离参数聚类(10经、纬度范围)表现出
更集中的特点,具有更好的聚类相似性,表示聚类平均声速剖面与聚类中每一个声速剖面样本的平均差异越小,如果判断声速估计任务时空区声速分布属于该分布类型,则以聚类平均声速剖面分布作为声速估计任务时空区的声速剖面分布结果,将具有更好的估计精度。
39.2、图5给出了在欧氏距离密度阈值,邻居数量阈值和欧氏距离密度阈值,邻居数量阈值,以及不同取值时,根据时空信息对声速估计任务当前时空区域所属声速剖面类型进行映射的准确度。两组曲线中均在时达到准确度最大值,表明了在当前时间、空间参数单位量纲情况下,利用时间、空间信息对声速估计任务当前时空区域所属声速剖面类型映射的最佳平衡比例;同时也表明空间信息不同对于声速估计任务当前时空区域所属声速剖面类型的决定性占比更高。
40.3、图6给出了300组声速剖面测试数据作为声速估计任务,在不同聚类准则和声速剖面估计任务当前时空区间所属类型映射准则情况下,以聚类平均声速剖面作为声速估计任务的声速分布估计结果,得到的平均声速分布估计误差以及方差区间分布。其中,1为负梯度声速剖面测试数据,跨时空声速剖面聚类(局部密度聚类),基于时空信息声速估计任务所属类型影射;2为为负梯度声速剖面测试数据,距离参数聚类(10经、纬度范围),基于时空信息声速估计任务所属类型影射;3为为负梯度声速剖面测试数据,时间参数聚类(30日范围),基于时空信息声速估计任务所属类型影射;4为为负梯度声速剖面测试数据,跨时空声速剖面聚类(局部密度聚类),基于时空信息声速估计任务所属类型影射;5为负梯度声速剖面测试数据,距离参数聚类(10经、纬度范围),基于时空信息声速估计任务所属类型影射;6为为负梯度声速剖面测试数据,时间参数聚类(30日范围),基于时空信息声速估计任务所属类型影射;图6结果表明,不论是负梯度声速剖面测试数据还是正梯度声速剖面测试数据,跨时空声速剖面聚类(局部密度聚类)结合基于时空信息的声速估计任务所属类型映射,相比于单纯依据距离参数聚类与声速估计任务所属类型映射或者单纯依据时间参数聚类与声速估计任务所属类型映射,能够更准确地对声速估计任务的声速分布情况进行预测,误差的平均值更低,误差的方差波动范围更小。
41.通过上述实施例可以看出,本发明利用与声速估计任务所在时空区间此区间具有相同声速分布特征的其他时空区间的历史声速剖面数据为参考,以平均声速剖面分布情况对目标区域声速分布进行估计。本发明提出的方法可以在无现场实测数据的情况下,仅利用声速估计任务的地点与时间信息(时空信息),完成对目标区域的声速剖面分布快速估计,尤其对于历史参考样本稀少的时空区间,通过跨时空声速剖面聚类,可利用其他时空区间中具有相似声速剖面分布特征的样本作为参考,最终完成对目标区域的声速剖面分布的快速估计。
42.在上述实施例的基础上,本发明继续对其中涉及到的技术特征及该技术特征在本发明中所起到的功能、作用进行详细的描述,以帮助本领域的技术人员充分理解本发明的技术方案并且予以重现。
43.最后,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解
的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。