1.本发明涉及一种焊接机,具体涉及一种钢性防水套管自动焊机。
背景技术:
2.钢性防水套管是管道工程施工之中十分常见的一种管件,又叫钢套管。钢性防水套管是钢管外加翼环(钢板做的环形套在钢管上),装于墙内(多为混凝土墙),用于一般管道穿墙,利于墙体的防水。钢性防水套管一般用在地下室,区别刚性防水套管是钢管外加翼环,用于管道穿墙处,不承受管道振动。
3.钢性防水套管适用于管道穿墙处不承受管道振动和伸缩变形的构(建)筑物,适用于管道穿墙处空间有限或管道安装先于构(建)筑物或管道的更新改造。对于有地震设防要求的地区,如采用钢性防水套管,应在进入池壁或建筑物外墙的管道上就近设置柔性连接。
4.钢制柔性防水套管是根据建筑科学研究院研制设计的s312、02s404标准图集制造的。柔性防水套管一般适用于管道穿过墙壁之处受有振动或有严密防水要求的构筑物;钢性防水套管一般适用于管道穿过墙壁之处要求一般防水的构筑物;柔性及钢性防水套管穿墙处之墙壁,如遇非混凝土时应改用混凝土墙壁,而且必须将套管一次凝固于墙内;防水套管施用于建筑、化工、钢铁、自来水、污水处理等单位。
5.钢性防水套管的效果是避免水面从外壁泄漏,因此在工程施工的情况下必须应用钢性防水套管来实现密封性,那样才能够保障水不容易泄露。在制作防水套管时,翼环和套管厚度应符合规范要求,防水套管的翼环两边应双面满焊。由于应用非常广泛,全国各地都有生产企业,不过目前全部为人工焊接,由于人工焊接成本高,而且人员流动性大,生产企业迫切需要自动焊接替代人工焊接。
技术实现要素:
6.本发明所要解决的技术问题是一种钢性防水套管自动焊机,无需人工点焊,完全脱离电焊工,实现真正意义上的自动焊接,可同时操作多台,减轻了劳动强度,减少了生产成本。
7.本发明是通过以下技术方案来实现的:一种钢性防水套管自动焊机,包括机箱、设置在机箱上的主轴旋转机构、工件装夹模组以及焊接模组,所述机箱上具有一个加工平台,工件装夹模组活动式的安装在加工平台上,焊接模组位于工件装夹模组的上端面,用于对夹持后的工件进行焊接,工件部分装夹在三爪卡盘上,部分固定在工件装夹模组上。
8.作为优选的技术方案,所述工件装夹模组包括一纵向滑板,纵向滑板底部滑动安装在加工平台上,位于纵向滑板的顶部滑动设置有法兰前定位座以及法兰后定位座,所述法兰前定位座上安装第一立柱,法兰后定位座上安装第二立柱,位于第一立柱与第二立柱之间的纵向滑板上还倾斜设置有第三立柱,利用第一、第二以及第三立柱形成三点支撑;
9.所述法兰前定位座的第一立柱外侧端设置有法兰前压紧机构,法兰后定位座的第二立柱上安装有法兰后压紧机构,通过法兰前压紧机构与法兰后压紧机构将工件的翼环一
侧压紧在第一立柱、第二立柱以及第三立柱一侧,工件的套管固定在三爪卡盘上。
10.作为优选的技术方案,所述法兰前压紧机构包括两个对称设置的法兰前压紧气缸,法兰前压紧机构包括两个对称设置的法兰后压紧气缸,法兰前压紧机构与法兰后压紧机构内均设置有齿轮传动机构,齿轮传动机构的输出端均设置一传动杆,其中,法兰前压紧机构上的传动杆输出端安装法兰前压紧爪,法兰后压紧机构上的传动杆输出端安装法兰后压紧爪。
11.作为优选的技术方案,齿轮传动机构均包括一旋转齿轮以及一传动齿条,两个对称设置的压紧气缸输出端连接传动齿条的两侧,旋转齿轮固定安装在传动杆上,传动杆上位于旋转齿轮上下端分别安装一轴承,旋转齿轮与传动齿条啮合。
12.作为优选的技术方案,所述第一立柱、第二立柱、第三立柱的顶部均转动安装一管子拖轮,位于管子拖轮一侧均设置有一牛眼轴承,当工件的翼环通过法兰前压紧机构与法兰后压紧机构压紧后,翼环的另一侧面紧贴着牛眼轴承。
13.作为优选的技术方案,所述第二立柱的底部通过定位转轴铰接在纵向滑板上。
14.作为优选的技术方案,所述加工平台上突出设置有纵向导轨,纵向滑板底部滑动安装在纵向导轨上,纵向导轨上设置有定位螺孔,纵向滑板上对应定位螺孔的位置设置有锁紧螺丝,锁紧螺丝锁入其中一个定位螺孔内定位纵向滑板在加工平台上的位置。
15.作为优选的技术方案,所述法兰前定位座以及法兰后定位座的底部均设置有导向滑块,纵向滑板上设置有导向滑槽,导向滑块滑动设置在导向滑槽中。
16.作为优选的技术方案,所述焊接模组包括左焊枪、右焊枪、左抬枪气缸、右抬枪气缸、摆枪器以及操作控制器,所述左焊枪通过焊枪支架安装在左抬枪气缸的输出端,所述右焊枪通过焊枪支架安装在右抬枪气缸的输出端,抬枪气缸、右抬枪气缸安装于摆枪器的输出端。
17.本发明的有益效果是:1.无需人工点焊,完全脱离电焊工,实现真正意义上的自动焊接;
18.2.普通工人便可使用该设备.可同时操作多台,减轻了劳动强度,减少了生产成本;
19.3.可以焊接多种型号,而且更换模具方便,快捷;
20.4.双面满焊,一次性完成,无需二次装夹。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
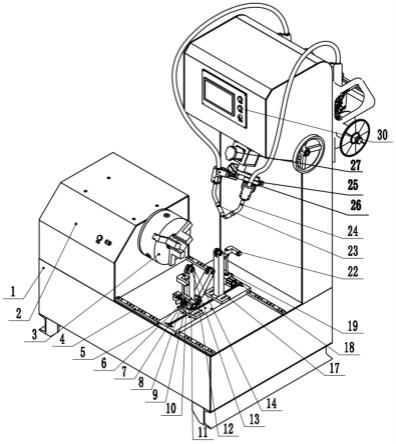
22.图1为本发明的整体结构示意图;
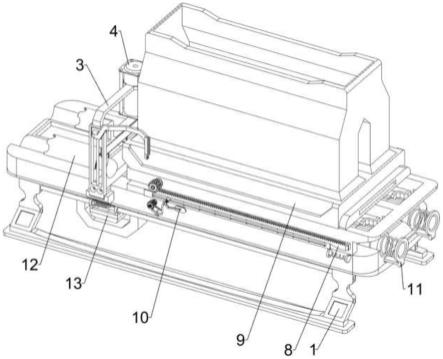
23.图2为本发明的工件装夹模组的结构示意图;
24.图3为本发明的齿轮传动部分的局部放大图;
25.图4为本发明的工件装配完成后的结构示意图。
具体实施方式
26.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
27.本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
28.如图1所示,本发明的一种钢性防水套管自动焊机,包括机箱1、设置在机箱1上的主轴旋转机构2、工件装夹模组以及焊接模组,主轴旋转机构上安装三爪卡盘3,所述机箱1上具有一个加工平台,工件装夹模组活动式的安装在加工平台上,焊接模组位于工件装夹模组的上端面,用于对夹持后的工件进行焊接,工件部分装夹在三爪卡盘3上,部分固定在工件装夹模组上。
29.如图2所示,工件装夹模组包括一纵向滑板5,纵向滑板5底部滑动安装在加工平台上,位于纵向滑板5的顶部滑动设置有法兰前定位座6以及法兰后定位座17,所述法兰前定位座6上安装第一立柱34,法兰后定位座17上安装第二立柱35,位于第一立柱34与第二立柱35之间的纵向滑板上还倾斜设置有第三立柱33,第三立柱倾斜布设,配合两侧的第一立柱与第二立柱,形成三点支撑的结构,用于支撑套管200,支撑套管200底部与第一立柱、第二立柱以及第三立柱上端的管子拖轮滚动接触,减少摩擦;
30.法兰前定位座6的第一立柱34外侧端设置有法兰前压紧机构,法兰后定位座17的第二立柱35上安装有法兰后压紧机构19,通过法兰前压紧机构与法兰后压紧机构19将工件的翼环一侧压紧在第一立柱34、第二立柱35以及第三立柱33一侧,工件的套管固定在三爪卡盘3上。
31.请继续参阅图2,法兰前压紧机构包括两个对称设置的法兰前压紧气缸11,法兰前压紧机构包括两个对称设置的法兰后压紧气缸18,法兰前压紧机构与法兰后压紧机构19内均设置有齿轮传动机构32,齿轮传动机构32的输出端均设置一传动杆39,其中,法兰前压紧机构上的传动杆39输出端安装法兰前压紧爪10,法兰后压紧机构上的传动杆39输出端安装法兰后压紧爪22,法兰前压紧爪10与法兰后压紧爪22相对工件装夹一面均设置有,压紧气缸动作带动齿条动作,齿条动作带动旋转齿轮转动,旋转齿轮转动带动传动杆转动,传动杆带动顶部的压紧爪转动,进而将翼环100压紧在第一立柱、第二立柱以及第三立柱一侧,由于压紧爪相对翼环100一侧设置有牛眼轴承,因此可以与翼环侧面滚动压紧。
32.如图3所示,齿轮传动机构32均包括一旋转齿轮8以及一传动齿条9,两个对称设置的压紧气缸输出端连接传动齿条9的两侧,旋转齿轮9固定安装在传动杆9上,传动杆9上位于旋转齿轮9上下端分别安装一轴承7,旋转齿轮8与传动齿条9啮合,通过设置两个对称的压紧气缸,实现传动齿条的往复动作,进而带动旋转齿轮正反向转动,进而带动压紧爪的打开与关闭。
33.第一立柱34、第二立柱35、第三立柱33的顶部均转动安装一管子拖轮14,通过管子拖轮实现与套管的滚动接触,位于管子拖轮14一侧均设置有一牛眼轴承13,当工件的翼环通过法兰前压紧机构与法兰后压紧机构压紧后,翼环的另一侧面紧贴着牛眼轴承13,实现滚动接触。
34.其中,第二立柱35的底部通过定位转轴12铰接在纵向滑板5上,加工平台上突出设
置有纵向导轨4,纵向滑板5底部滑动安装在纵向导轨4上,纵向导轨4上设置有定位螺孔,纵向滑板上对应定位螺孔的位置设置有锁紧螺丝,锁紧螺丝锁入其中一个定位螺孔内定位纵向滑板在加工平台上的位置,可将纵向滑板沿着纵向导轨调节位置。
35.其中,法兰前定位座6以及法兰后定位座17的底部均设置有导向滑块,纵向滑板上设置有导向滑槽,导向滑块滑动设置在导向滑槽中,通过导向滑块配合导向滑槽实现定位座的位置调节。
36.本实施例中,所述焊接模组包括左焊枪23、右焊枪24、左抬枪气缸26、右抬枪气缸25、摆枪器27以及操作控制器30,所述左焊枪通过焊枪支架安装在左抬枪气缸26的输出端,所述右焊枪通过焊枪支架安装在右抬枪气缸26的输出端,抬枪气缸26、右抬枪气缸25安装于摆枪器的输出端。由于钢管和翼环中间间隙较大,正常焊接是实现不了的,所以本实施例中使用摆枪器,利用摆枪器实现上下摆动,进而实现上下摆动焊接,焊缝大一点也可以焊接,此处为焊接领域对于大焊缝的常用焊接方式,不具体赘述。
37.工作原理如下:
38.首先根据要焊接管子的直径,和翼环在管子上的位置,把纵向导轨,纵向滑板,法兰后定位座调整到合适位置,把焊枪通过上下移动模组和纵向调整手柄调整到合适位置。焊接开始前,将管子套在卡盘三爪上,通过扳手把管子撑牢。然后把翼环套在套管上,通过按钮把法兰前压紧气缸和法兰后压紧气缸使法兰前压紧爪和法兰后压紧爪对翼环进行压紧,如图4所示,然后通过操作控制器,一键开启焊接,然后通过主轴旋转机构转动,双面满焊完成结束。
39.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。