1.本发明涉及活动弯头装配技术领域,特别涉及一种全自动装配设备及方法。
背景技术:
2.现有技术中,活动弯头的装配是人工手动将弯头一和弯头二插接相连,然后手动往弯头一的孔道内装填弹珠,同时对已装填弹珠的个数进行计数,待弹珠装填数量达标后,再手动用堵头对孔道口进行封堵,避免弹珠流出,整个过程中耗时较长,装配速度慢,效率低,尤其在往孔道内装填弹珠时,需要利用工具一个一个地将孔道口的弹珠捅入孔道内,同时不停地摇晃弯头一,使钢珠有序装入孔道内,十分麻烦,费时费力。
技术实现要素:
3.本发明的主要目的是提出一种全自动装配设备和方法,旨在解决目前活动弯头采用人工装配速度慢、效率低,费时费力的问题。
4.为解决上述问题,本发明提出了一种全自动装配设备,包括:
5.装配机构,用于往弯头一的孔道内装填弹珠和用堵头对孔道进行封口;
6.夹取装置,用于夹取弯头一和弯头二与装配机构一起配合完成弯头一和弯头二的组装以及将组装在一起且弹珠装填完毕的弯头一和弯头二夹离装配机构。
7.在一实施例中,所述装配机构包括:
8.旋转架,可绕竖直轴线回转;
9.夹具二,可绕水平轴线回转地安装在旋转架上,所述夹具二用于夹紧固定弯头一和/或弯头二;
10.振动上料装置,数量至少有两个,一个用于向弯头一输送弹珠,另一个用于向弯头一输送堵头;
11.下压装置,用于将弹珠压入孔道内以及将堵头压入孔道口;
12.光电开关,用于检测进入孔道内的弹珠数量。
13.在一实施例中,所述旋转架回转安装在装配台上,所述下压装置、光电开关与振动上料装置固连;
14.所述振动上料装置可相对装配台沿夹具二的回转轴线方向移动。
15.在一实施例中,所述振动上料装置包括振动盘和出料槽,所述出料槽一端连接振动盘,另一端伸入下压装置和孔道口之间。
16.在一实施例中,所述装配台上设有直线电机,所述直线电机的活动端与振动盘相连,用于推动振动盘沿夹具二的回转轴线方向移动。
17.在一实施例中,所述夹取装置包括六轴机器人和设于六轴机器人远端的视觉定位装置及夹具一,所述夹具一用于夹取弯头一和/或弯头二。
18.在一实施例中,所述全自动装配设备还包括上料装置和下料装置,所述上料装置用于向所述夹取装置输送弯头一和弯头二,所述下料装置用于将夹离装配机构的弯头一和
弯头二送走。
19.此外,为实现上述目的,本发明还提出了一种全自动装配方法,包括:
20.夹取弯头一和弯头二至装配机构并与装配机构一起配合完成弯头一和弯头二的组装;
21.移动弯头一至装配机构的弹珠装填工位,通过下压装置一将振动上料装置一输送来的弹珠压入弯头一的孔道内;
22.移动弯头一至装配机构的堵头装填工位,通过下压装置二将振动上料装置二输送来的堵头压入弯头一的孔道口中;
23.夹取弯头一和弯头二离开装配机构。
24.在一实施例中,所述夹取弯头一和弯头二至装配机构并与装配机构一起配合完成弯头一和弯头二的组装包括:
25.夹取弯头一至装配机构并使弯头一被装配机构固定;
26.夹取弯头二向弯头一靠近,并通过视觉定位装置完成弯头一和弯头二的插接组装。
27.在一实施例中,所述全自动装配方法还包括:
28.向装配机构输送弯头一和弯头二;
29.将离开装配机构的弯头一和弯头二送走。
30.有益效果:本发明的技术方案通过装配机构和夹取装置相互配合完成了活动弯头的自动装配,相比传统人工装配,速度快,效率高,省时省力,实用性好。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
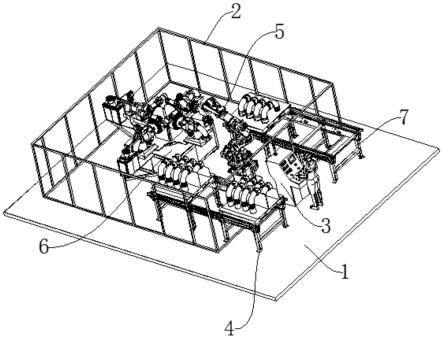
32.图1是本发明全自动装配设备的结构示意图;
33.图2是图1中的上料装置的结构示意图;
34.图3是图1中的下料装置的结构示意图;
35.图4是图1中的夹取装置的结构示意图;
36.图5是图4中的a部放大图;
37.图6是图1中的装配机构的结构示意图;
38.图7是图6中的b部放大图;
39.图8是图6中的c部放大图;
40.图9是图6中装配机构按箭头所示方向的示意图。
41.附图标记说明如下:
42.1、底板;
43.2、防护栏;
44.3、电器控制柜;
45.4、上料装置;41、机架一;42、带式输送机一;43、治具一;44、弯头一;45、弯头二;
46、孔道口;
46.5、夹取装置;51、六轴机器人;52、夹具一;53、视觉定位装置;
47.6、装配机构;601、装配台;602、旋转装置;603、转台;604、定位支架;605、立板;606、安装筒;607、电机;608、卡盘座;609、卡爪;610、安装架一;611、机箱;612、振动盘;613、出料槽;614、安装架二;615、下压装置;616、光电开关;617、滑板;618、直线电机;
48.7、下料装置;71、机架二;72、带式输送机二;73、治具二。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
51.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
52.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,全文中出现的“和/或”的含义,包括三个并列的方案,以“a和/或b”为例,包括a方案、或b方案、或a和b同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
53.本发明提出了一种全自动装配设备,用于装配活动弯头,所述活动弯头包括弯头一44和弯头二45,所述弯头一44和弯头二45插接连接,所述弯头一44内设有孔道,所述孔道中装填有弹珠,所述弯头一44和弯头二45通过弹珠回转连接。
54.如图1所示,在发明一实施例中,所述全自动装配设备至少包括装配机构6和夹取装置5,所述装配机构6用于往弯头一44的孔道内装填弹珠和用堵头对孔道进行封口;所述夹取装置5用于夹取弯头一44和弯头二45与装配机构6一起配合完成弯头一44和弯头二45的组装以及将组装在一起且弹珠装填完毕的弯头一44和弯头二45夹离装配机构6。
55.本实施例的全自动装配设备在工作过程中,先通过夹取装置5夹取弯头一44和弯头二45与装配机构6一起配合完成弯头一44和弯头二45的组装,也即将弯头二45的一端插入弯头一44内,然后通过装配机构6往弯头一44的孔道内装填弹珠,待弹珠装填完毕后,通过装配机构6用堵头对孔道进行封口,避免弹珠流出,至此,活动弯头装配完毕,最后通过夹取装置5将组装完毕的活动弯头夹离装配机构6即可,接着重复前述动作即可完成下一个活
动弯头的装配。
56.本实施例的全自动装配设备通过装配机构6和夹取装置5相互配合完成了活动弯头的全自动装配,装配速度快,效率高,大幅节省人力成本,实用性好。
57.在本实施例中,所述装配机构6包括旋转架、夹具二、振动上料装置4和下压装置615,所述下压装置615与振动上料装置4固连,所述旋转架可绕竖直轴线回转地设置,所述夹具二设于旋转架上,且可绕水平轴线回转,所述夹具二用于夹紧固定弯头一44和/或弯头二45,所述旋转架用于带动夹具二旋转,继而带动弯头一44移动至弹珠装填工位装填弹珠装和堵头装填工位装填堵头,所述振动上料装置4的数量至少有两个,一个用于向弯头一44输送弹珠,另一个用于向弯头一44输送堵头;所述下压装置615用于将弹珠压入孔道内以及将堵头压入孔道口46。
58.在本实施例中,工作时,所述夹取装置5先夹取弯头一44或弯头二45至夹具二,待夹具二将弯头一44或弯头二45夹紧固定后,所述夹取装置5再夹取弯头二45或弯头一44并将其与夹具二上的弯头一44或弯头二45插接相连,接着所述旋转架转动带动插接相连的弯头一44和弯头二45旋转移动至弹珠装填工位,其中一个所述振动上料装置4将弹珠输送至弯头一44的孔道口46的正上方,由下压装置615将该弹珠压入弯头一44的孔道内,完成弹珠装填,接着所述旋转架继续转动带动插接相连的弯头一44和弯头二45旋转移动至堵头装填工位,另一个所述振动上料装置4将堵头输送至弯头一44的孔道口46的正上方,由下压装置615将该堵头压入弯头一44的孔道口46内,完成堵头装填,至此,活动弯头装配完毕,最后,通过夹取装置5将活动弯头夹离装配机构6即可,重复前述动作,可完成下一个活动弯头的装配。
59.在本实施例中,所述旋转架回转安装在装配台601上,如图6和图9所示,所述旋转架包括旋转装置602、转台603和立板605,所述转台603水平设置在装配台601上并与装配台601以绕竖直线回转的方式连接,所述立板605竖直固定在转台603上,所述旋转装置602固定在装配台601内,所述旋转装置602的活动端与转台603相连,用于带动转台603回转,优选的,所述旋转装置602为步进电机607。
60.进一步的,在本实施例中,如图6和图9所示,所述转台603上固设有定位支架604,所述定位支架604用于对弯头一44或弯头二45进行定位,使夹具二快速将定位完毕的弯头一44或弯头二45夹紧固定,缩短定位耗时,提高装配效率。
61.在本实施例中,如图6-图9所示,所述夹具二包括电机607、安装筒606和三爪卡盘,所述三爪卡盘包括卡盘座608和卡爪609,所述安装筒606水平固定安装在立板605上,所述卡盘座608回转安装在安装筒606中并能绕水平轴线回转,所述卡爪609可将弯头一44或弯头二45夹紧固定,所述电机607与立板605或安装筒606固连,所述电机607的输出轴与卡盘座608传动连接,用于带动卡盘座608旋转,继而实现三爪卡盘绕水平轴线回转。
62.进一步的,所述电机607包括刹车电机和振动电机,所述刹车电机和振动电机均与卡盘座608传动连接,所述刹车电机用于带动卡盘座608旋转,使每个孔道口46均能够旋转至竖直朝上位置接受弹珠和堵头装配,所述振动电机用于带动卡盘座608振动,继而使弯头一44振动,使弹珠有序装入孔道内。
63.在本实施例中,如图7所示,所述弯头一44具有多个孔道,且每个孔道的孔道口46的位置各不相同,也即相邻两个孔道的孔道口46在弯头一44的中心轴线处的夹角不为0,由
于弹珠和堵头是被下压装置615竖直向下移动压入孔道内,故装填弹珠和堵头时需要保证孔道的孔道口46竖直朝上,因此在其中一个孔道完成弹珠和堵头的装填后需要三爪卡盘回转带动另一个孔道的孔道口46旋转至竖直朝上位置才能进行该孔道装填弹珠和堵头的作业。
64.在本实施例中,如图6-图9所示,所述振动上料装置4包括振动盘612和出料槽613,所述振动盘612安装在机箱611上,所述机箱611用于存储各种维修工具,所述机箱611固定安装在安装架一610上,所述安装架一610与装配台601固连,所述出料槽613一端连接振动盘612,另一端伸入下压装置615和孔道口46之间,所述振动盘612启动后将弹珠或堵头送入出料槽613,弹珠或堵头沿着出料槽613移动至下压装置615和孔道口46之间,然后通过下压装置615将弹珠或堵头压入孔道口46中,完成弹珠或堵头的装配。
65.在本实施例中,如图6和图9所示,所述振动上料装置4有两个,其中一个用于向弯头一44输送弹珠,另一个用于向弯头一44输送堵头,图6中示出的装配台601具有四个工位,分别为上下料工位、弹珠装填工位、堵头装填工位和缓存工位,两个振动上料装置4分别设置在弹珠装填工位和堵头装填工位,相应的,旋转架上安装有与四个工位一一对应的四套夹具二,四套夹具二均可夹紧固定一组弯头一44和弯头二45,当某一套夹具二旋转至上下料工位时,其余三套夹具二分别位于弹珠装填工位、堵头装填工位和缓存工位,所述夹取装置5可将位于上下料工位中的夹具二上的装配完毕的活动弯头取走并夹取新的弯头一44或弯头二45供夹具二夹紧,从而完成活动弯头的上下料,位于弹珠装填工位的夹具二上的弯头一44接受振动上料装置4装填弹珠,位于堵头装填工位的夹具二上的弯头一44接受振动上料装置4装填堵头,位于缓存工位的夹具二上的弯头一44已完成装配,等待上下料工位中的夹具二离开后,缓存工位的夹具二进入上下料工位进行下料,优选的,旋转架上安装的四套夹具二呈中心对称分布,且相邻夹具二之间夹角90度,如图6所示,这样设计,旋转架每旋转90度即可使某一套夹具二从上下料工位开始依次经过弹珠装填工位、堵头装填工位和缓存工位后返回上下料工位,从而完成活动弯头的上料-弹珠装填-堵头装填-下料工序,实现活动弯头的全自动装配。
66.在本实施例中,如图6-图9所示,所述下压装置615固定安装在安装架二614上,所述安装架二614与机箱611固连,常见的,所述下压装置615为气缸或液压缸或直线电机618。
67.在本实施例中,所述振动上料装置4可相对装配台601沿夹具二的回转轴线方向移动,因为如图7所示,所述弯头一44的多个孔道的孔道口46距弯头一44的同一端的距离各不相等,故一个孔道完成装填后,需要所述振动上料装置4沿弯头一44的轴线方向、也即夹具二的回转轴线方向移动,同时夹具二带动弯头一44回转,才能使出料槽613的另一端伸入下压装置615和另一个孔道口46之间,所述振动上料装置4的移动可通过如下结构来实现,如图8所示,所述机箱611上设有直线电机618,所述直线电机618的活动端连接滑板617,所述振动盘612和安装架二614均固定安装在滑板617上,通过直线电机618推动滑板617移动带动振动盘612和安装架二614同步沿夹具二的回转轴线方向移动,从而确保下压装置615能够移动至每个孔道口46的正上方。
68.在本实施例中,所述装配机构6还包括光电开关616,用于检测进入孔道内的弹珠的数量,以便判断该孔道是否装填完毕,比如图7所示,可将光电开关616设于安装架二614上,通过光电开关616检测经过出料槽613的弹珠数量,待一个孔道中装填的弹珠数量达标
后即可装填下一个孔道。
69.在本实施例中,如图4和图5所示,所述夹取装置5包括六轴机器人51和设于六轴机器人51远端的视觉定位装置53及夹具一52,所述夹具一52用于夹取弯头一44和/或弯头二45,优选的,所述夹具一52有两个,其中一个用于夹取分离的弯头一44和弯头二45,另一个用于夹取已经装配在一起的弯头一44和弯头二45,也即夹取装配完毕的活动弯头。
70.在本实施例中,所述六轴机器人51控制其中一个夹具一52夹取弯头一44或弯头二45放置到上下料工位中的夹具二上并被卡爪609夹紧固定,然后六轴机器人51控制该夹具一52夹取弯头二45或弯头一44并向上下料工位移动靠近,接着在视觉定位装置53的帮助下六轴机器人51控制夹具一52夹取的弯头二45或弯头一44与被卡爪609固定的弯头一44或弯头二45进行装配,最终完成弯头二45的一端插入弯头一44内,接着上下料工位中的夹具二便可向弹珠装填工位移动对弯头一44进行弹珠装填,同时缓存工位的夹具二进入上下料工位后,所述六轴机器人51控制另一个夹具一52夹取装配完毕的活动弯头离开夹具二,完成活动弯头的下料。
71.进一步的,在本实施例中,所述全自动装配设备还包括上料装置4和下料装置7,所述上料装置4用于向所述夹取装置5输送呈分离状态的弯头一44和弯头二45,所述下料装置7用于将夹离装配机构6的弯头一44和弯头二45送走,这样设计,可实现活动弯头的连续流水线式全自动装配,装配速度和效率进一步提升。
72.在本实施例中,如图2所示,所述上料装置4包括机架一41和安装在机架一41上的带式输送机一42,所述带式输送机一42上放置有治具一43,呈分离状态的弯头一44和弯头二45被整齐摆放在治具一43上,如图1所示,带式输送机一42将治具一43输送至靠近夹取装置5的位置后,所述夹取装置5夹取弯头一44和弯头二45至装配机构6的上下料工位与夹具二配合完成弯头一44和弯头二45的插接组装。
73.在本实施例中,如图3所示,所述下料装置7包括机架二71和安装在机架二71上的带式输送机二72,所述带式输送机二72上放置有治具二73,装配完毕的活动弯头被夹取装置5放置在治具二73上,如图1所示,缓存工位的夹具二进入上下料工位后,所述夹取装置5夹取装配完毕的活动弯头离开装配机构6,并将活动弯头整齐摆放在治具二73上,待治具二73上的活动弯头摆放满后,带式输送机二72将治具二73送走即可。
74.此外,为实现上述目的,本发明还提出了一种全自动装配方法,包括:
75.s1、夹取弯头一44和弯头二45至装配机构6并与装配机构6一起配合完成弯头一44和弯头二45的组装;
76.s2、移动弯头一44至装配机构6的弹珠装填工位,通过下压装置615一将振动上料装置4一输送来的弹珠压入弯头一44的孔道内;
77.s3、移动弯头一44至装配机构6的堵头装填工位,通过下压装置615二将振动上料装置4二输送来的堵头压入弯头一44的孔道口46中;
78.s4、夹取弯头一44和弯头二45离开装配机构6。
79.在本实施例中,步骤s1夹取弯头一44和弯头二45至装配机构6并与装配机构6一起配合完成弯头一44和弯头二45的组装包括:
80.s11、夹取弯头一44至装配机构6并使弯头一44被装配机构6的夹具二固定;
81.s12、夹取弯头二45向弯头一44靠近,并通过视觉定位装置53完成弯头一44和弯头
二45的插接组装。
82.在本实施例中,步骤s2中将振动上料装置4一输送来的弹珠压入弯头一44的孔道内后实时检测进入孔道内的弹珠的数量并在数量达到设定值后调整振动上料装置4一和下压装置615一的位置,对另一个孔道进行弹珠装填。
83.在本实施例中,所述全自动装配方法还包括:
84.通过上料装置4向装配机构6输送弯头一44和弯头二45;
85.通过下料装置7将离开装配机构6的弯头一44和弯头二45送走,从而实现活动弯头的流水线式全自动化装配,进一步提升装配效率。
86.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
