1.本发明属于垃圾处理技术领域,具体涉及一种智能分类垃圾箱。
背景技术:
2.垃圾分类,一般是指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称;近年来,上海、北京、杭州等城市已经在推进垃圾智能分类。
3.很多居民虽然具有垃圾分类的意识,但是居民很难判断垃圾具体是什么类别,影响垃圾分类的推广。
技术实现要素:
4.本发明的目的在于提供一种智能分类垃圾箱,克服了现有技术的不足,在垃圾箱上设置摄像头配合图像处理单元辅助判断垃圾的分类,帮助快速分辨垃圾类型,让垃圾回到自己的位置,提高了人们的环保意识。
5.为解决上述问题,本发明所采取的技术方案如下:
6.一种智能分类垃圾箱,包括多个垃圾箱体、安装在垃圾箱体内用于装放垃圾的垃圾桶以及安装在垃圾箱体一端控制箱,所述垃圾箱的上部前端面开设有投放口,且投放口内安装有可遮盖投放口的箱盖门,所述垃圾箱体的前端安装有可转动的出料门;
7.所述投放口的上方安装有高清摄像头,所述控制箱内安装有图像处理单元以及控制器,所述高清摄像头将采集的图像传输至图像处理单元,经过图像处理单元处理判断垃圾的品类后通过控制器控制对应箱盖门开启。
8.进一步,所述图像处理单元对图像的处理方法包括以下步骤:
9.(1)预处理:高清摄像头采集的彩色图像传输至图像处理单元后首先进行灰度化处理,采用离散高斯滤波函数对灰度化的图像进行滤波,对图像进行加权平均,采用canny检测算子进行图像边缘检测,并对图像进行切割;
10.(2)特征提取:将预处理后的图像输入图像特征提取模型,得到图像的初始图像特征,对初始图像特征进行非线性变换处理,得到目标图像特征;
11.(3)对比识别:将目标图像特征与数据库中图像特征集进行对比,达到设定的相似度,即判定为同一种物品,将对比结果发送至控制器。
12.进一步,所述图像特征提取模型利用pytorch深度学习框架学习预处理后图像制作的训练集,捕捉并记录图像上垃圾的形状、材质;通过反复学习,对训练集中的图像进行分类;同时将图像素材进行卷积、激励、池化,再输出到输出层。
13.进一步,所述垃圾箱体的顶端安装有遮雨挡板,且遮雨挡板的前端延伸至投放口的前方,所述遮雨挡板上安装有太阳能装置,且控制箱内安装有为设备供电的储能电源,所述储能电源通过导线与太阳能装置连接。
14.进一步,所述遮雨挡板的下端面安装有多个线形分布的照明灯,且遮雨挡板的下方安装有光照传感器,所述控制器通过光照传感器传回的信号来控制照明灯的启闭。
15.进一步,所述垃圾桶内安装有横向的过滤网,且过滤网的下方设置有抽拉盒,所述抽拉盒的顶部开口,且抽拉盒内放置有吸收海绵,所述抽拉盒的一端延伸至垃圾桶的前端面,且抽拉盒的底端通过滑块与垃圾桶滑动连接。
16.进一步,所述垃圾桶的下端面四个角上均安装有移动轮,且垃圾箱体的前端面安装有一斜坡件。
17.进一步,所述箱盖门的顶端通过转轴与投放口的顶部转动连接,且箱盖门的底端靠近投放口的一侧嵌设有磁石,所述投放口的下方嵌设有与磁石对应的电磁铁,所述电磁铁与控制器电性连接。
18.进一步,所述垃圾箱体的前端面安装有指示灯,且指示灯安装在投放口的下方,用于指示对应箱盖门的状态。
19.本发明与现有技术相比较,具有以下有益效果:
20.本发明通过高清摄像头和图像处理单元,对垃圾的种类进行判断,并根据其种类控制对应的投放口,帮助人们快速进行垃圾分类,让垃圾回到自己的位置,提高了人们的环保意识。
附图说明
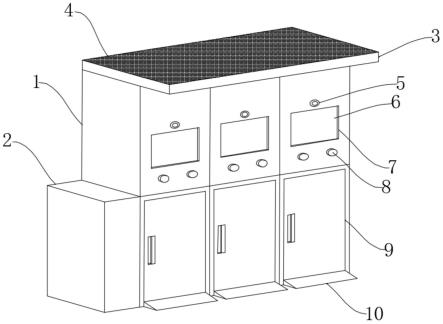
21.图1为一种智能分类垃圾箱的结构示意图。
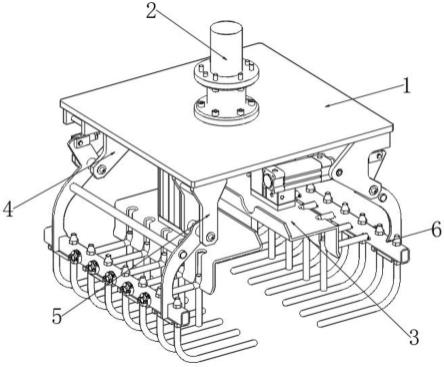
22.图2为一种智能分类垃圾箱中垃圾桶的结构示意图。
23.图3为一种智能分类垃圾箱的控制原理框图。
24.图中:1、垃圾箱体;2、控制箱;3、遮雨挡板;4、太阳能装置;5、高清摄像头;6、箱盖门;7、投放口;8、指示灯;9、出料门;10、斜坡件;11、垃圾桶;12、过滤网;13、抽拉盒;14、吸水海绵;15、滑块;16、移动轮。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.如图1-图3所示,本发明所述一种智能分类垃圾箱,包括多个垃圾箱体1、安装在垃圾箱体1内用于装放垃圾的垃圾桶11以及安装在垃圾箱体1一端控制箱2,垃圾箱的上部前端面开设有投放口7,且投放口7内安装有可遮盖投放口7的箱盖门6,垃圾箱体1的前端安装有可转动的出料门9;
27.投放口7的上方安装有高清摄像头5,控制箱2内安装有图像处理单元以及控制器,高清摄像头5将采集的图像传输至图像处理单元,经过图像处理单元处理判断垃圾的品类后通过控制器控制对应箱盖门6开启。
28.图像处理单元对图像的处理方法包括以下步骤:
29.(1)预处理:高清摄像头5采集的彩色图像传输至图像处理单元后首先进行灰度化处理,采用离散高斯滤波函数对灰度化的图像进行滤波,对图像进行加权平均,采用canny检测算子进行图像边缘检测,并对图像进行切割;
30.(2)特征提取:将预处理后的图像输入图像特征提取模型,得到图像的初始图像特征,对初始图像特征进行非线性变换处理,得到目标图像特征;
31.(3)对比识别:将目标图像特征与数据库中图像特征集进行对比,达到设定的相似度,即判定为同一种物品,将对比结果发送至控制器。
32.图像特征提取模型利用pytorch深度学习框架学习预处理后图像制作的训练集,捕捉并记录图像上垃圾的形状、材质;通过反复学习,对训练集中的图像进行分类;同时将图像素材进行卷积、激励、池化,再输出到输出层。
33.垃圾箱体1的顶端安装有遮雨挡板3,且遮雨挡板3的前端延伸至投放口7的前方,遮雨挡板3上安装有太阳能装置4,且控制箱2内安装有为设备供电的储能电源,储能电源通过导线与太阳能装置4连接。
34.为了进行补光,遮雨挡板3的下端面安装有多个线形分布的照明灯,且遮雨挡板3的下方安装有光照传感器,控制器通过光照传感器传回的信号来控制照明灯的启闭。
35.为了实现干湿分离,垃圾桶11内安装有横向的过滤网12,且过滤网12的下方设置有抽拉盒13,抽拉盒13的顶部开口,且抽拉盒13内放置有吸收海绵,抽拉盒13的一端延伸至垃圾桶11的前端面,且抽拉盒13的底端通过滑块15与垃圾桶11滑动连接。
36.为了方便清理垃圾桶11,垃圾桶11的下端面四个角上均安装有移动轮16,且垃圾箱体1的前端面安装有一斜坡件10;需要清理垃圾桶11时打开出料门9,利用移动轮16拉出垃圾桶11即可。
37.为了方便开启箱盖门6,箱盖门6的顶端通过转轴与投放口7的顶部转动连接,且箱盖门6的底端靠近投放口7的一侧嵌设有磁石,投放口7的下方嵌设有与磁石对应的电磁铁,电磁铁与控制器电性连接。
38.为了便于指示分类,垃圾箱体1的前端面安装有指示灯8,且指示灯8安装在投放口7的下方,用于指示对应箱盖门6的状态;在识别垃圾的分类后,控制器控制对应投放口7的指示灯8转为绿灯,提示操作人员将垃圾投放在对应垃圾箱体1内。
39.使用时首先通过太阳能装置4将太阳能转化为电能并储存在储能电源内,并通过储能电源为设备充电;在使用者需要丢垃圾时,使用者手持垃圾靠近任一垃圾箱体1的投放口7,高清摄像头5获取垃圾的图像,将垃圾的图像传输至图像处理单元,在经过灰度化、滤波处理后再边缘检测,切割出图像,将切割后的图像输入特征提取模型,得到目标图像特征,将目标图像特征与数据库进行对比,获得相似度,对达到设定相似度的即判定为同一物品,并获取该物品的类别;控制器在获取到物品类别后控制对应投放口7内电磁铁转换磁极,由相吸的磁极转换为相斥的磁极,从而使箱盖门6打开,使用者将垃圾自投放口7投入到垃圾桶11内;
40.垃圾进入垃圾桶11后,固体的垃圾留在过滤网12上,且液体沿着过滤网12流到抽拉盒13内,然后被吸水海绵14吸收;一段时间后,工作人员打开出料门9,自垃圾箱体1内拉出垃圾桶11,首先抽拉出抽拉盒13取出其中的吸收海绵,清理抽拉盒13后放置新的吸水海绵14,再倾倒出其中的固体垃圾,将清理后的垃圾桶11再放置到垃圾箱体1内。
41.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权
利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。