1.本发明涉及隧道爆破施工领域,具体涉及一种隧道爆破装药结构识别记录方法、装置、设备及介质。
背景技术:
2.现市面上隧道工程开挖的主要方法是钻爆法施工,隧道爆破施工中如何采用科学合理的装药结构来控制周边超欠挖量和降低围岩损伤是工程人员关注的重点;其中,通过隧道周边孔装药结构的调整和优化可显著降低爆破对隧道保留围岩的扰动,对于隧道爆破成型质量的控制至关重要。
3.目前,隧道周边孔不同装药结构下的振动特征还缺乏量化指标,传统的隧道振动监测采用“随测随走”的监测方式,存在测点频繁布置、数据采集时效性差等缺陷;现市面上,根据振动特征识别记录装药结构类型和振动数据的方法大多是采用人工进行实时的记录和监督,工作劳动强度大,容易出现漏记、错记、类型识别错误等情况,且受记录人员主观意识的影响未能有效指导生产实践,远远不能满足工程技术和管理人员对周边孔装药结构识别分类的迫切要求,容易导致影响后续的隧道爆破开挖减振降损效果、从而降低了围岩自稳能力的问题。
4.有鉴于此,提出本技术。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种隧道爆破装药结构识别记录方法、装置、设备及介质,能有效解决现有技术中的根据振动特征识别记录装药结构类型和振动数据的方法大多是采用人工进行实时的记录和监督,工作劳动强度大,容易出现漏记、错记、类型识别错误等情况,容易导致影响后续的隧道爆破开挖减振降损效果、从而降低了围岩自稳能力的问题。
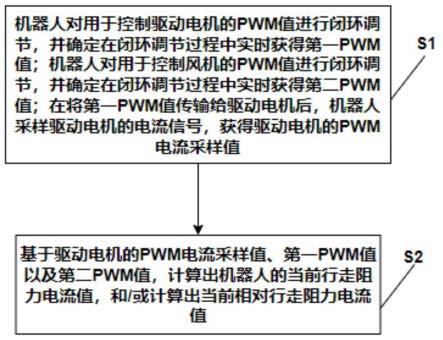
6.本发明提供了一种隧道爆破装药结构识别记录方法,包括:
7.获取由无线测振单元采集到的隧道周边装药结构爆破产生的爆破信号集;
8.对所述爆破信号集进行处理,生成多组降维数据;
9.调用训练好的knn模型对所述降维数据进行处理,生成与所述爆破信号集对应的装药结构类型,其中,所述knn模型的自动采集单元会自动记录下隧道爆破过程中产生的与所述装药结构类型对应的振动数据。
10.优选地,对所述爆破信号集进行处理,生成多组降维数据,具体为:
11.对所述爆破信号集的数据进行aok时频谱计算,生成时频图像;
12.采用灰度共生算法对所述时频图像进行计算,生成与所述时频图像对应的灰度共生矩阵;
13.对所述灰度共生矩阵进行pca降维处理,建立降维后的反映所述时频图像的特征的三个主成分特征向量,生成多组降维数据。
14.优选地,采用灰度共生算法对所述时频图像进行计算,生成与所述时频图像对应的灰度共生矩阵,具体为:
15.对所述时频图像进行自适应最优核分析,生成时频谱图像的幅值灰度化;
16.根据公式m2=m1 δm,n2=n1 δn对所述时频谱图像的幅值灰度化进行计算,生成矩阵共生,其中,i,j=1,2,...,l,《》为图像矩阵中某个元素对(i,j)元素处产生的共生值,δm和δn分别为该元素到元素(i,j)需要左右以及上下移动的位移,f(x,y)为爆破信号在时频域两个维度时频谱数字图像的灰度,其大小为lm×
ln,lm及ln为时频谱像素空间位置,lm=1,2,...,nm,ln=1,2,...,nn,(m1,n1)为图像中一点的坐标;(m2,n2)为另一点坐标;
17.对计算i(i,j)得到的所述共生矩阵的各个数值除以矩阵中的最大元素,进行共生矩阵归一化处理,生成不同装药结构爆破振动信号的时频谱图像矩阵的灰度共生矩阵。
18.优选地,对所述灰度共生矩阵进行pca降维处理,具体为:
19.根据公式计算所述爆破信号集的均值向量,其中,i=1,2,...,n为时频图像灰度共生矩阵所提取的特征方向数量;k=1,2,...,p为时频图像图像灰度共生矩阵每个特征方向特征数量;
20.根据公式计算原始高维数据零均值化的标准矩阵,其中,
21.根据公式计算所述爆破信号集的协方差矩阵;
22.计算协方差矩阵的特征值i=λ1,λ2,...,λ
p
,λ1,>>...>>λ
p
及其对应的属性向量
∝1,
∝2,...,
∝
p
,并将特征值由大到小进行排序,根据公式计算每个主成分所含的贡献率σi和累计贡献率δ;
23.取最大的d个属性特征值(d《p),将对应的属性特征向量
∝1,
∝2,...,
∝d组成转换矩阵a=[
∝1,
∝2,...,
∝d],并根据公式y=a
t
x计算图像特征矩阵数据x降至d维的数据y,生成多组降维数据。
[0024]
优选地,在调用训练好的knn模型对所述降维数据进行处理之前,还包括:
[0025]
获取由无线测振单元采集到的多组不同隧道周边装药结构爆破产生的不同装药结构类型的爆破信号集;
[0026]
对每一所述不同装药结构类型的爆破信号集进行处理,生成多组识别分类图像分析降维原始数据集;
[0027]
随机筛选不同装药结构类型且预设数量相同的多组识别分类图像分析降维原始数据集,并调用一个基于pso-elm的knn模型对每一所述识别分类图像分析降维原始数据集进行训练处理,生成训练误差值,直至所述训练误差值小于预设值为止,生成knn训练模型;
[0028]
随机筛选不同装药结构类型且预设数量相同的多组识别分类图像分析降维原始数据集,并调用所述knn训练模型进行准确度验证计算,生成平均准确率,直至所述平均准确率达到预设值为止,生成knn模型。
[0029]
优选地,所述不同装药结构类型的爆破信号集包括连续装药结构爆破信号集、水间隔装药结构爆破信号集、以及空气间隔装药结构爆破信号集。
[0030]
本发明还提供了一种隧道爆破装药结构识别记录装置,包括:
[0031]
数据获取单元,用于获取由无线测振单元采集到的隧道周边装药结构爆破产生的爆破信号集;
[0032]
数据处理单元,用于对所述爆破信号集进行处理,生成多组降维数据;
[0033]
识别记录单元,用于调用训练好的knn模型对所述降维数据进行处理,生成与所述爆破信号集对应的装药结构类型,其中,所述knn模型的自动采集单元会自动记录下隧道爆破过程中产生的与所述装药结构类型对应的振动数据。
[0034]
优选地,所述数据处理单元具体用于:
[0035]
对所述爆破信号集的数据进行aok时频谱计算,生成时频图像;
[0036]
采用灰度共生算法对所述时频图像进行计算,生成与所述时频图像对应的灰度共生矩阵;
[0037]
对所述灰度共生矩阵进行pca降维处理,建立降维后的反映所述时频图像的特征的三个主成分特征向量,生成多组降维数据。
[0038]
本发明还提供了一种隧道爆破装药结构识别记录设备,包括处理器、存储器以及存储在所述存储器中且被配置由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上任意一项所述的一种隧道爆破装药结构识别记录方法。
[0039]
本发明还提供了一种可读存储介质,存储有计算机程序,所述计算机程序能够被该存储介质所在设备的处理器执行,以实现如上任意一项所述的一种隧道爆破装药结构识别记录方法。
[0040]
综上所述,本实施例提供的一种隧道爆破装药结构识别记录方法、装置、设备及介质,所述隧道爆破装药结构识别记录方法在采集到爆破信号后,依次采用aok时频谱计算、灰度共生算法、pca降维处理对数据进行处理,并调用训练好的knn模型对处理后的数据进行计算,所述knn模型内的knn分类器能根据采集到的爆破信号识别出此次使用的装药结构类型之外,而所述knn模型内的自动采集单元能自动记录下爆破过程中产生的振动数据,无需工作人员自主进行识别以及数据记录,在一定程度上减少了工作人员繁琐的工作步骤。从而解决了现有技术中的根据振动特征识别记录装药结构类型和振动数据的方法大多是采用人工进行实时的记录和监督,工作劳动强度大,容易出现漏记、错记、类型识别错误等情况,容易导致影响后续的隧道爆破开挖减振降损、从而降低了围岩自稳能力的问题。
附图说明
[0041]
图1是本发明实施例提供的一种隧道爆破装药结构识别记录方法的流程示意图。
[0042]
图2是本发明实施例提供的隧道周边孔三种装药结构示意图。
[0043]
图3是本发明实施例提供的隧道周边预留光爆层炮孔布置示意图。
[0044]
图4是本发明实施例提供的凿岩台车爆破作业流程示意图。
[0045]
图5本发明提供的不同周边孔装药结构爆破振动信号波形曲线示意图。
[0046]
图6是本发明实施例提供的不同周边孔装药结构爆破振动信号aok时频谱示意图。
[0047]
图7是是本发明实施例提供的灰度共生矩阵四个生成方向示意图。
[0048]
图8是本发明提供的爆破信号时频图像特征pca降维流程示意图。
[0049]
图9是本发明第一方面提供的基于pso-elm特征映射的knn算法验证样本分类示意图。
[0050]
图10是本发明第二方面提供的基于pso-elm特征映射的knn算法验证样本分类示意图。
[0051]
图11是本发明实施例提供的一种隧道爆破装药结构识别记录装置的模块示意图。
具体实施方式
[0052]
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
[0053]
以下结合附图对本发明的具体实施例做详细说明。
[0054]
本发明公开了一种隧道爆破装药结构识别记录方法、装置、设备及介质,至少在一定程度上解决了现有技术的不足。
[0055]
请参阅图1,本发明第一实施例提供了一种隧道爆破装药结构识别记录方法,其可由隧道爆破装药结构识别记录设备(以下简称识别记录设备)来执行,特别的,由识别记录设备内的一个或者多个处理器来执行,以实现如下步骤:
[0056]
s101,获取由无线测振单元采集到的隧道周边装药结构爆破产生的爆破信号集;
[0057]
具体地,在本实施例中,现市面上常见的隧道周边孔三种装药结构的具体形式为连续装药、水间隔装药、以及空气间隔装药。请参阅图2(a),连续装药是设计爆破单循环进尺为1.2m,所述炮孔为连续装药结构,沿炮孔口至炮孔底部分别为炮泥段和装药段。炮泥段长度为400mm,装药段长度为800mm。炮孔装填炸药为2#低密度岩石乳化炸药,炮孔直径为40mm,药卷直径32mm,长度200mm,单药卷质量80g,径向不耦合系数为1.25。为了提高爆破效率,炮孔采用数码电子雷管底部反向起爆方式。请参阅图2(b),水间隔装药是设计爆破单循环进尺为1.2m,所述炮孔为三段式装药结构,沿炮孔口至炮孔底部分别为炮泥段,长度为400mm;第一装药段,长度为80mm;第一水间隔段,长度为240mm;第二装药段,长度为80mm;第二水间隔段,长度为240mm;底部装药段,长度为160mm。炮孔装填炸药为2#岩石乳化炸药,炮孔直径为40mm,药卷直径32mm,长度200mm,单药卷质量200g,径向不耦合系数为1.25,轴向不耦合系数为2.5。为了提高爆破效率,炮孔采用底部反向起爆,采用数码电子雷管起爆,底部装药段炸药量为第一、二装药段的2倍。请参阅图2(c),空气间隔装药是设计爆破单循环进尺为1.2m,所述炮孔为三段式装药结构,沿炮孔口至炮孔底部分别为炮泥段,长度为
400mm;第一装药段,长度为80mm;第一空气间隔段,长度为240mm;第二装药段,长度为80mm;第二空气间隔段,长度为240mm;底部装药段,长度为160mm。炮孔装填炸药为2#岩石乳化炸药,炮孔直径为40mm,药卷直径32mm,长度200mm,单药卷质量200g,径向不耦合系数为1.25,轴向不耦合系数为2.5。为了提高爆破效率,炮孔采用底部反向起爆,采用数码电子雷管起爆,底部装药段炸药量为第一、二装药段的2倍。炮孔堵塞用炮泥是由粘土、中粗砂和水按照重量比例为:0.75:0.10:0.15,并在水中增加适量对的聚丙烯酰胺,增加炮泥的粘结性。炮泥用pnj系列炮泥机制备,其主要技术参数为:生产效率600-1000个/小时,炮泥直径30-50mm,炮泥密实度1.9g/cm3,使用时在炮泥表明均匀包裹一层硅酸盐水泥粉末,装药时将捆扎好的炸药送入炮眼底部,左手拽住炮线将炮泥送入炮眼,用木质炮棍跟进推入,待炸药充分进入炮眼底部时,用炮棍将炮泥捣实。使用该类型炮泥后,可降低炸药单耗20%左右、减少钻孔数并节约钻具钢约15%、循环进尺增加约5%,另外,空气冲击波的减小缩短了爆碴的抛掷距离,增加了爆破的安全性;同时炮烟及有毒气体含量的减少,降低了长距离通风难度,改善了隧道作业环境,爆碴块度减小,二次破碎率减少,同时降低了清碴费用15%左右,堵塞效果好。
[0058]
在本实施例中,在采集爆破信号前,工作人员需要先预留光爆层,即爆破采用预留光爆层形式,如图3所示,预留光爆层厚度为500mm,已开挖部分采用ebh35系列硬岩掘进机机械开挖,周边孔炮孔采用凿岩台车打孔,周边炮孔钻孔外插角度为3
°
,所有炮孔底部落在同一平面内,单孔药量为0.32kg,炮孔总数为37个,腰部和拱部两侧均匀布置30个炮孔,炮孔间距500mm,炮孔间距底部炮孔数为7个,炮孔间距960mm,总装药量为11.84kg,爆破网路采用簇联方式,所有炮孔分为6簇,每簇采用2发ms1段毫秒延期导爆管雷管,最后使用导爆管四通连接导爆管,导爆管接发爆器一次起爆。隧道围岩为弱风化花岗岩,密度为2.657kg/cm3,弹性模量e为80gpa,泊松比为0.29。为了保证钻孔精度,上述三种装药结构炮孔均采用zys113三臂凿岩台车钻孔。相较于传统气腿钻人工钻孔,凿岩台车对高硬度围岩的适应性更强,具有钻进速度快、耗能低等优点,可以严格按照设计图进行全自动炮眼钻孔,对钻孔参数进行有效设定,自动进行钻孔、清孔工作。以充分保障钻孔按照有关设计展开,加强对炮孔钻凿角度和深度的控制,沿隧道掌子面后方延伸画出5条控制线,1条拱肩与4条坡度线,精确定位炮孔中心位置。其中,凿岩台车爆破作业流程如图4所示。
[0059]
对爆破隧道产生的爆破振动信号的监测和分析一直以来都被作为评价爆破效果和参数优化的重要依据,传统的隧道振动监测采用“随测随走”的监测方式,存在测点频繁布置、数据采集时效性差等缺陷,所述隧道爆破装药结构识别记录方法对隧道爆破振动的监测采用的是远程无线网络自动监测,该监测系统主要由云振动数据采集箱、三向振动速度传感器、公网服务器数据中心、客户端构成。在爆破现场测试前,可以通过定制卡箍固定好传感器并用粘结剂充填传感器与隧道衬砌间的缝隙,打开仪器电源并确保接通网络后即可离开现场,通过远程计算机完成参数设置和启动采集后,仪器即进入工作状态。测试前,根据隧道爆破特点,设定测振仪采样频率为8000hz,采样时长为0.1s,触发方式为内触发。当爆破振动触发采集传感器时,系统会自动记录下整个动态波形,将其转换为数字信号后传输至云服务器数据中心,实现数据的实时采集和存储,测试人员在远离爆破现场处通过终端软件,即可将数据进行操作分析,并实时监控控制系统工作状态。其中,不同周边孔装药结构爆破振动信号波形曲线,如图5所示,其中,图5(a)为连续装药结构爆破振动信号波
形曲线,图5(b)为水间隔装药结构爆破振动信号波形曲线,图5(c)为空气间隔装药结构爆破振动信号波形曲线。
[0060]
s102,对所述爆破信号集进行处理,生成多组降维数据;
[0061]
具体地,步骤s102包括:对所述爆破信号集的数据进行aok时频谱计算,生成时频图像;
[0062]
采用灰度共生算法对所述时频图像进行计算,生成与所述时频图像对应的灰度共生矩阵;
[0063]
对所述灰度共生矩阵进行pca降维处理,建立降维后的反映所述时频图像的特征的三个主成分特征向量,生成多组降维数据。
[0064]
具体地,在本实施例中,对所述爆破信号集采用了最优核时频分布方法进行分析,最优核时频分布是一种主要的时频分析方法,它具有时频分辨率高的特点,但由于它是双线性表变换,在对多分量信号进行分析时会存在较严重的交叉项干扰而影响最后的分析结果。为了抑制交叉项的干扰,使信号的自主量能够分离出来,人们对最优核时频分布进行了改进,改进后的时频分析统称为cohen类双线性时频分布,其表达式为:改进,改进后的时频分析统称为cohen类双线性时频分布,其表达式为:式中,φ(θ,τ)为低通的核函数,a(θ,τ)为爆破信号s(t)的模糊函数,t为爆破信号持续时间,ω为频率,θ为频移,τ为时移,它的定义为:通过设计不同的核函数就能得到不同的分布特性,而为了在时频分布平面内不出现交叉项,则需要在模糊函数域内有效去除互分量而仅保留自分量。将核函数定义为沿任意径向剖面都是gauss型的二维函数可以达到上述目的。其表达式为:式中,为控制径向高斯核函数在径向角方向的扩展,为水平方向和径向的夹角。
[0065]
将核函数定义为沿任意径向剖面都是gauss型的二维函数,虽然可以有效去除互分量而保留自分量的要求,但是其不适合于多段别微差爆破产生的长时间非平稳信号的分析。自适应最优核(adaptive optimum kernel representation,aok)时频分布中定义短时模糊函数a(t,θ,τ),它是被窗函数截断后的一小段信号的模糊函数:模糊函数a(t,θ,τ),它是被窗函数截断后的一小段信号的模糊函数:式中,ω(u)为对称的窗函数,t是ω(u)的中心位置。令|u|》t(t为窗长),ω(u)=0,则在任一时刻,只有在[t-t,t t]范围内的信号才可计算其模糊函数。对于爆破信号的任意细节部分,短时模糊函数均可准确刻画出来,此时可得与之相应的自适应最优核函数φ
opt
(t,θ,τ)。则时间段内[t-t,t t]内爆破信号的自适应最优核时频分布为:上述三种不同装药结构下的典型爆破振动信号aok时频谱如图6所示,其中,图6(a)为连续装药结构爆破振动信号aok时频谱,图6(b)为水间隔装药结构爆破振动信号aok时频谱,图6(c)为空气间隔装药结构爆破振动信号aok时频谱。
[0066]
在本实施例中,灰度共生矩阵(gray level co-occurrence matrix,glcm)能够反
映爆破信号时频谱的纹理特征,结合相关特征值可用于装药结构的判别。计算灰度共生矩阵及特征值的具体步骤为:
[0067]
首先,将爆破信号分析自适应最优核(adaptive optimum kernel representation,aok)时频谱图像的幅值灰度化(即幅值变换到0~256范围内)。
[0068]
其次,计算时频谱图像的灰度共生矩阵,该矩阵主要表示图像中某点δm和δn位置灰度值为i和j的概率分布:m2=m1 δm,n2=n1 δn,式中,i,j=1,2,...,l,《》代表图像矩阵中某个元素对(i,j)元素处产生的共生值;δm和δn分别为该元素到元素(i,j)需要左右以及上下移动的位移;f(x,y)为爆破信号在时频域两个维度时频谱数字图像的灰度,其大小为lm×
ln,lm及ln为时频谱像素空间位置,lm=1,2,...,nm,ln=1,2,...,nn,(m1,n1)为图像中一点的坐标;(m2,n2)为另一点坐标。共生矩阵本质上是两个像素点的联合直方图,对于时频谱图像中细而规则的纹理,成对像素点的二维直方图倾向于均匀分布;对于粗而规则的纹理,则倾向于对角分布。
[0069]
再次,对计算i(i,j)得到的共生矩阵的各个数值除以矩阵中的最大元素,进行共生矩阵归一化处理。
[0070]
最后,计算炮孔不同装药结构爆破振动信号的时频谱图像矩阵的灰度共生矩阵(glcm),提取得到时频谱的能量值、对比度、相关度、熵值、逆方差、惯性矩共6个维度特征向量。
[0071]
其中,能量值定义为:能量值反映了图像灰度分布均匀程度和纹理粗细度。若灰度共生矩阵的元素值相近,则能量较小,表示纹理细致;若其中一些元素值大,而其他值小,则能量值较大。能量值大表明一种较均匀的纹理模式。对比度定义为:con=∑i∑j(i-j)2i(i,j,d,θ),对比度是灰度共生矩阵主对角线附近的惯性矩,它体现矩阵的值如何分布,反映了图像的清晰度和纹理沟纹的深浅。相关度定义为:corrln=[∑i∑j(ij)i(i,j,d,θ)-μ
x
μy]/σ
x
σy,相关度体现了空间灰度共生矩阵元素在行或列方向上的相似程度,反映了图像局部灰度相关性。熵值定义为:ent=-∑ii(i,j,d,θ)log i(i,j,d,θ),熵值体现了图像纹理的随机性。若共生矩阵中所有值都相等,取得最大值;若共生矩阵中的值不均匀,则其值会变得很小。逆方差定义为:逆方差反映了纹理的清晰程度和规则程度,纹理清晰、规律性较强、易于描述的,值较大。惯性矩定义为:mom=∑i∑
j i(i,j|d,θ)(i-j)2,惯性矩是灰度共生矩阵的二次统计量,惯性矩可将图像灰度的空间分布拉开,更能分辨出灰度空间分布的复杂程度。惯性矩值越大,图像沟纹越明显,图像也就越清晰;反之,惯性矩越小,图像纹理沟纹越弱,图像也就越模糊。根据上述时频图像灰度共生矩阵产生的能量值、对比度、相关度、熵值、逆方差和惯性矩建立六维特征向量fi(i=1,2,3,4,5,6)。
[0072]
灰度共生矩阵体现了在一种纹理模式下像素的空间关系,这种空间关系包含方向θ、图像灰度级g、距离s三方面的内容。生成灰度共生矩阵时,此处是在0
°
、45
°
、90
°
和135
°
共4个方向上进行统计,距离的大小统一取为s=1,灰度级g=16,从而得到4
×
6特征矩阵x,为了便于统计,对上述矩阵进行归一化处理得到归一化特征矩阵x。此构造方法下的特征值稳
定、变化浮动小、特殊值出现概率最小。爆破时频图像灰度共生矩阵四个生成方向如图7所示。其中,典型爆破信号时频图像灰度共生归一化特征矩阵表,如表1所示:
[0073]
表1
[0074][0075][0076]
在本实施例中,不同装药结构爆破采集振动信号时频谱图像灰度共生矩阵特征空间维数过高,极易造成数据冗余,给后续的识别和分类造成困难。对得到的高维度矩阵数据进行降维,既能充分利用其丰富的数据量,又能降低数据处理代价、解决特征空间维数过高的问题,还能保留必要的图像信息,提高时频谱图像识别、分类的精度和效率。
[0077]
pca算法是一种基于线性映射的特征提取技术。通过一定变换将高维影像数据变换到一个新的低维空间,使高维数据的最大方差投影在第一个低维空间的坐标(即第一主成分分量)上,第二大方差投影在第二个低维空间的坐标(第二主成分分量)上,以此类推。利用少数几个主成分分量将原始高维影像数据最大限度地保留下来,第一主成分分量包含了原始高维影像数据中的绝大部分信息。pca算法主要利用协方差矩阵是一个实对角矩阵的性质,即方差最大化、协方差最小化,来进行降维。使用pca算法对灰度共生矩阵提取得到的炮孔不同装药结构特征向量进行降维,去除向量集合中的冗余向量。假设灰度共生矩阵每个方向数据有p个特征值,数据表示为:x=(x1,x2,...,xn)=(x1,x2,...,x
p
)
t
,其中xk为一个n
×
1维的列向量(n为时频图像灰度共生矩阵方向数量),则x为一个p
×
n的矩阵,降维后的低维输出维度为d(d<<p)。其主要步骤为:
[0078]
首先,计算所有数据的均值向量:式中,i=1,2,...,n表示时频图像灰度共生矩阵所提取的特征方向数量;k=1,2,...,p表示时频图像图像灰度共生矩阵每个特征方向特征数量。
[0079]
其次,计算原始高维数据零均值化的标准矩阵,式中,
[0080]
再次,计算待分析数据样本的协方差矩阵:
[0081]
复次,计算协方差矩阵的特征值i=λ1,λ2,...,λ
p
,λ1,>>...>>λ
p
及其对应的属性向量
∝1,
∝2,...,
∝
p
,并将特征值由大到小进行排序,其属性向量会随特征值的排序依次排列,通过得到的属性特征值,计算每个主成分所含的贡献率σi和累计贡献率δ:
[0082]
最后,取最大的d个属性特征值(d<<p),将对应的属性特征向量
∝1,
∝2,...,
∝d组成转换矩阵a=[
∝1,
∝2,...,
∝d],利用下式计算得到图像特征矩阵数据x降至d维的数据y:y=a
t
x。变换后原始影像数据的绝大部分信息排在前面的几个主成分分量中,众多靠后分量包含的信息基本为噪声。pca算法的降维流程图如图8所示。其中,pca各主成分分量的贡献率与累计贡献率表,如表2所示:
[0083]
表2
[0084][0085]
s103,调用训练好的knn模型对所述降维数据进行处理,生成与所述爆破信号集对应的装药结构类型,其中,所述knn模型的自动采集单元会自动记录下隧道爆破过程中产生的与所述装药结构类型对应的振动数据。
[0086]
具体地,在本实施例中,原始爆破信号时频图像灰度共生数据经过pca降维后其前3个主成分分量便可表达整个数据95%以上的信息量。pca算法可对数据进行优化处理,实现数据压缩降维的目的。
[0087]
在同一爆心距下采集三种周边孔装药形式下的爆破振动信号900组,分别对采集得到的上述三种周边孔装药形式下爆破振动信号并进行aok时频谱求解,形成分类标签e={e1,e2,e3},通常取为1、2和3三类简易分类标签类别,分别代表连续装药结构、水间隔装药结构和空气间隔装药结构三种装药结构类型。采用灰度共生算法得到反映时频图像特征的灰度共生矩阵,利用pca对上述特征矩阵降维从而形成不同装药形式下的目标矩阵,每幅时频图像进行灰度共生计算并将经pca降维后的特征确定为一个三维特征向量y={y1,y2,y3},分别对应第一主成分pc1、第二主成分pc2和第三主成分pc3,从而获得时频图像的有限维度数字化信息特征。
[0088]
粒子群算法(particle swarm optimization,pso)是通过模拟鸟群觅食行为而发展起来的一种基于群体协作的随机搜索算法,目前已广泛应用到如参数优化和系统控制领域。在pso中,每一个粒子代表空间中的一点,其对应的空间坐标代表该问题的一组解,可以利用适应度函数计算每个粒子的适应度,同时每个粒子还有一个速度属性,用来决定它们的方向和距离。粒子之间通过共享最优粒子的信息在解空间中搜索最优解。粒子群首先计算每个粒子的适应度fitness,选择适应度最优的点,让其他所有点朝着最优点移动,以此迭代寻找最优解。在每次迭代过程中,粒子先朝着当前最优解更新速度,然后更新当前位置。建立粒子更新速度公式:v
id
=v
id
c1·
rand(p
id-x
id
) c2·
rand(p
gd-x
gd
),建立粒子更新位置公式:x
id
=x
id
v
id
,式中:pi=(p
i1
,p
i2
,...p
id
),表示第i个粒子的局部最优解,即第i个
粒子每次迭代到目前位置经历过的最佳点;pg=(p
g1
,p
g2
,...p
gd
),表示粒子群的最优解,即目前为止粒子群所搜索到的适应度最优的解;c1和c2是学习因子,为大于零的常数;rand表示在[0,1]生成随机数。
[0089]
极端学习机算法(extreme learning machine,elm)是一种单隐层前向反馈神经网络,可以随意地选择隐层神经元数目和激活函数类型,构造不同的网络结构,隐层偏差和输入层权值可以随机产生,再利用输出层期望使用最小二乘法计算输出层权值。该算法具有计算速度快、泛化能力好等优点,避免了传统神经网络使用梯度算法计算时间长,容易陷入局部最优解的问题。目前在系统辨识、模式识别、函数逼近等方面具有广泛的应用。
[0090]
knn(k-nearest neighbor)算法作为一种惰性学习模型,也被称为基于实例的学习模型。knn算法的思路如下:如果一个待分析数据样本在特征空间中的k个最相似(特征空间中k个最近邻)的待分析数据样本中的大多数属于某一个类别,则该待分析数据样本被分类到该类别。在训练精度达到设定阈值时,当输入待分类的测试数据时,可以根据训练数据集预测出分类结果。minkowski距离是传统knn中广泛使用的距离度量之一。如果待分析数据样本特征具有相同的规模和数据分布,那么minkowski距离可以表示两点之间的实际距离。当特征点的个数为m时,计算训练待分析数据样本p=(x1,x2,...xm)和测试待分析数据样本q=(y1,y2,...ym)之间的欧式距离为:两个点之间的距离越短,它们之间的相似性越大。在计算所有点对的距离后,可确定测试待分析数据样本的类别。knn分类算法易于实现、分类性能好,主要表现为:算法的性能只与训练集有关,当测试待分析数据样本发生变化时不会产生影响,且待分析数据样本集越大性能越好。
[0091]
所述隧道爆破装药结构识别记录方法利用基于pso-elm特征映射的knn算法对图像数据集进行识别分类,该算法利用pso寻优策略替代elm算法输入层权值和隐层偏差随机生成的过程。利用优化后的elm输入层和隐层激活函数对待分析数据样本进行特征映射,再将映射后的特征待分析数据样本输入到knn算法中进行分类。对于给定n维输入分类待分析数据样本x=[x1,x2,
…
,xn]
t
,首先利用粒子群算法随机生成一组输入层权值ωi和隐藏偏差bi,通过具有个隐层神经元,激活函数为g(x)的elm对待分析数据样本进行特征映射后的特征向量为:特征向量为:式中:g(ωi*x) bi为隐层节点的输出,ωi为连接n个输入节点和第i个隐层节点的维权重向量;bi为第i个隐层节点的偏差。常用的激励函数有hardlim函数、sigmoid函数、sine函数等。再将特征变化后的h(x)输入到knn算法中,计算待分析数据样本分类的正确率。将分类正确率作为适应度fitness返回给粒子群算法,作为每一个粒子的适应度。通过pso多次迭代,获得使分类正确率最高的一组输入层权重ωi和隐层偏差bi。
[0092]
其中,算法具体步骤如下:
[0093]
步骤1,随机生成粒子群,每一个粒子群的位置坐标代表elm输入层权值ωi和隐层偏差bi。
[0094]
步骤2,依次选择各个粒子,对输入待分析数据样本xi做特征映射得到h(x),将h(x)作为新的待分析数据样本输入到knn中,并计算分类正确率作为对应粒子的适应度;
[0095]
步骤3,根据适应度更新每一个粒子的局部最优解pi和全局最优解pg;
[0096]
步骤4,根据粒子更新速度和更新位置更新每一个粒子的速度和位置;
[0097]
步骤5,判断是否达到最大迭代次数,若达到最大迭代次数,则输出最优的粒子位置即最优的输入层权值ωi和隐层bi以及分类正确率,否则返回步骤2。
[0098]
在本实施例中,所述隧道爆破装药结构识别记录方法根据建立好的粒子群、以及极端学习机算法和knn算法对所述降维数据进行计算,最终所述knn模型内的knn分类器会生成与所述爆破信号集对应的装药结构类型,且所述knn模型内的自动采集单元会自动记录下隧道爆破过程中产生的与所述装药结构类型对应的振动数据,无需工作人员自主进行识别以及数据记录,在一定程度上减少了工作人员繁琐的工作步骤。
[0099]
在本发明一个可能的实施例中,在调用训练好的knn模型对所述降维数据进行处理之前,还包括:
[0100]
获取由无线测振单元采集到的多组不同隧道周边装药结构爆破产生的不同装药结构类型的爆破信号集;
[0101]
对每一所述不同装药结构类型的爆破信号集进行处理,生成多组识别分类图像分析降维原始数据集;
[0102]
随机筛选不同装药结构类型且预设数量相同的多组识别分类图像分析降维原始数据集,并调用一个基于pso-elm的knn模型对每一所述识别分类图像分析降维原始数据集进行训练处理,生成训练误差值,直至所述训练误差值小于预设值为止,生成knn模型;
[0103]
随机筛选不同装药结构类型且预设数量相同的多组识别分类图像分析降维原始数据集,并调用所述knn模型进行准确度验证计算,生成平均准确率,直至所述平均准确率达到预设值为止,生成knn模型。
[0104]
在本发明一个可能的实施例中,所述不同装药结构类型的爆破信号集包括连续装药结构爆破信号集、水间隔装药结构爆破信号集、以及空气间隔装药结构爆破信号集。
[0105]
请参阅图9至图10,具体地,在本实施例中,在识别使用所述knn模型之前需要对其进行训练,以随机选取不同爆心距处连续装药、水间隔装药和空气间隔装药三种不同周边孔装药类型数据各300组(共900组)爆破振动信号并建立三类时频图像灰度共生矩阵并降维处理为例,按照7:2:1的比例划分为训练集(各210组,共630组)、验证集(各60组,共180组)和测试集(各30组,共90组),分别将三种不同爆破方案下图像集随机选取210幅图像降维特征向量作为训练数据输入前述基于pso-elm的knn分类器,对分类器进行反复训练,直至训练分类误差小于10-6为止。随机选择各60组(共180组)数据对分类精度进行验证,验证集平均准确率达到95%以上便认为精度满足工程要求,将不同周边装药形式下的剩余的各30组(共90组)数据输入训练成熟的knn分类器中,确定出给定不同类别(e1,e2,e3)作为隧道爆破周边孔不同装药结构识别分类的最终结果,实现连续装药、水间隔装药和空气间隔装药三类不同周边装药方式的判别分类。
[0106]
其中,模型识别准确率是指对于一批待分析样本数据中模型预测正确的待分析数据样本个数占该批数据中全部观测值总数的百分比:式中,pi为第i类图像识别准确率,ti为第i类图像识别正确的待分析数据样本数,fi为第i类图像识别错误的待分析数据样本数;对得到的各类图像样品的识别准确率求平均,进而得到平均识别准确率p。所述隧道爆破装药结构识别记录方法对连续装药、水间隔装药和空气间隔装药三种不同类型装药结构的判别分类的准确率达到97%以上,为隧道结构安全和精细化设计施工
及炮孔装药形式优化选取提供了便捷高效、智能化的预测判别、分类和记录方法。其中,所述knn模型训练集精度和测试集精度对比表,如表3所示:
[0107]
表3
[0108][0109]
请参阅图11,本发明第二实施例提供了一种隧道爆破装药结构识别记录装置,包括:
[0110]
数据获取单元101,用于获取由无线测振单元采集到的隧道周边装药结构爆破产生的爆破信号集;
[0111]
数据处理单元102,用于对所述爆破信号集进行处理,生成多组降维数据;
[0112]
识别记录单元103,用于调用训练好的knn模型对所述降维数据进行处理,生成与所述爆破信号集对应的装药结构类型,其中,所述knn模型的自动采集单元会自动记录下隧道爆破过程中产生的与所述装药结构类型对应的振动数据。
[0113]
在本发明一个可能的实施例中,所述数据处理单元具体用于:
[0114]
对所述爆破信号集的数据进行aok时频谱计算,生成时频图像;
[0115]
采用灰度共生算法对所述时频图像进行计算,生成与所述时频图像对应的灰度共生矩阵;
[0116]
对所述灰度共生矩阵进行pca降维处理,建立降维后的反映所述时频图像的特征的三个主成分特征向量,生成多组降维数据。
[0117]
本发明第三实施例提供了一种隧道爆破装药结构识别记录设备,包括处理器、存储器以及存储在所述存储器中且被配置由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上任意一项所述的一种隧道爆破装药结构识别记录方法。
[0118]
本发明第四实施例提供了一种可读存储介质,存储有计算机程序,所述计算机程序能够被该存储介质所在设备的处理器执行,以实现如上任意一项所述的一种隧道爆破装药结构识别记录方法。
[0119]
示例性地,本发明第三实施例和第四实施例中所述的计算机程序可以被分割成一个或多个模块,所述一个或者多个模块被存储在所述存储器中,并由所述处理器执行,以完成本发明。所述一个或多个模块可以是能够完成特定功能的一系列计算机程序指令段,该指令段用于描述所述计算机程序在所述实现一种隧道爆破装药结构识别记录设备中的执行过程。例如,本发明第二实施例中所述的装置。
[0120]
所称处理器可以是中央处理单元(central processing unit,cpu),还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可编程门阵列(field-programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器
等,所述处理器是所述一种隧道爆破装药结构识别记录方法的控制中心,利用各种接口和线路连接整个所述实现对一种隧道爆破装药结构识别记录方法的各个部分。
[0121]
所述存储器可用于存储所述计算机程序和/或模块,所述处理器通过运行或执行存储在所述存储器内的计算机程序和/或模块,以及调用存储在存储器内的数据,实现一种隧道爆破装药结构识别记录方法的各种功能。所述存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序(比如声音播放功能、文字转换功能等)等;存储数据区可存储根据手机的使用所创建的数据(比如音频数据、文字消息数据等)等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘、智能存储卡(smart media card,smc)、安全数字(secure digital,sd)卡、闪存卡(flash card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
[0122]
其中,所述实现的模块如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一个计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读介质可以包括:能够携带所述计算机程序代码的任何实体或装置、记录介质、u盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、电载波信号、电信信号以及软件分发介质等。需要说明的是,所述计算机可读介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减,例如在某些司法管辖区,根据立法和专利实践,计算机可读介质不包括电载波信号和电信信号。
[0123]
需说明的是,以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。另外,本发明提供的装置实施例附图中,模块之间的连接关系表示它们之间具有通信连接,具体可以实现为一条或多条通信总线或信号线。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
[0124]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。