自动修剪树障的装置的制作方法
- 国知局
- 2024-07-12 12:52:58
本申请涉及电力施工,特别是涉及一种自动修剪树障的装置。
背景技术:
1、树障是电线的常见安全隐患之一,当线路附近的树木因高度过高或受到风力影响与电线间隙小于安全距离时,线路会通过树木对地产生放电,造成人员伤亡、线路跳闸或引发森林火灾。当前采取大范围砍伐的手段处理树障隐患已不符合新时代生态环境理念,在满足电线安全距离的前提下,对树木进行局部修剪是当前最常见的处理树障隐患方式。在相关技术中,主要采用人工作业方式对树障进行清理,例如运用斗车载人进行清理、在地面使用高枝电锯或勾镰进行清理、爬梯上树清理等,以上方法受到地形因素的限制,清理效率较低,而且存在安全风险。
技术实现思路
1、基于此,有必要针对树障清理的问题,提供一种自动修剪树障的装置。
2、一种自动修剪树障的装置,所述自动修剪树障的装置包括:
3、修剪机构,包括刀片,所述刀片用于修剪树障;
4、移动机构,连接于所述修剪机构,所述移动机构能够沿电线的长度方向移动,以调节所述修剪机构和所述树障的相对位置。
5、上述自动修剪树障的装置,修剪机构的刀片能够修剪路障,而将移动机构连接于修剪机构,移动机构能够沿电线的长度方向移动,从而带动刀片沿电线的长度方向移动,也就调节了修剪机构和树障的相对位置,进而调节了修剪区域。本申请提供的自动修剪树障的装置,移动机构带动修剪机构沿电线的长度方向移动,从而修剪了电线附近的树障,防止其损害电线的正常运行。而且,不需要人工操作,提高作业效率,降低了人工作业的风险。
6、在其中一个实施例中,所述修剪机构还包括相连接的第一连接臂和第二连接臂,所述第一连接臂连接于所述移动机构,所述第二连接臂连接于所述刀片,所述第一连接臂和所述第二连接臂转动配合,以调节所述刀片的修剪角度。
7、在其中一个实施例中,所述修剪机构包括驱动件,所述驱动件连接于所述刀片,所述驱动件能够驱动所述刀片转动。
8、在其中一个实施例中,所述修剪机构还包括定位件,所述定位件具有开口,所述开口用于容纳修剪掉落的树木,以调节掉落的所述树木的倒伏方向。
9、在其中一个实施例中,所述移动机构包括第一动力模块,所述第一动力模块包括相连接的第一动力驱动源和第一动力轮,所述第一动力驱动源能够驱动所述第一动力轮沿所述电线的长度方向滑动。
10、在其中一个实施例中,所述移动机构包括还包括第一制动模块,所述第一制动模块包括第一刹车驱动源、第一移动刹车片以及第一固定刹车片,所述第一移动刹车片和所述第一固定刹车片沿所述电线的径向间隔排布,所述第一刹车驱动源连接于所述第一移动刹车片,所述第一刹车驱动源能够驱动所述第一移动刹车片沿所述径向向靠近所述第一固定刹车片的方向移动,以使所述第一移动刹车片和所述第一固定刹车片夹紧所述电线。
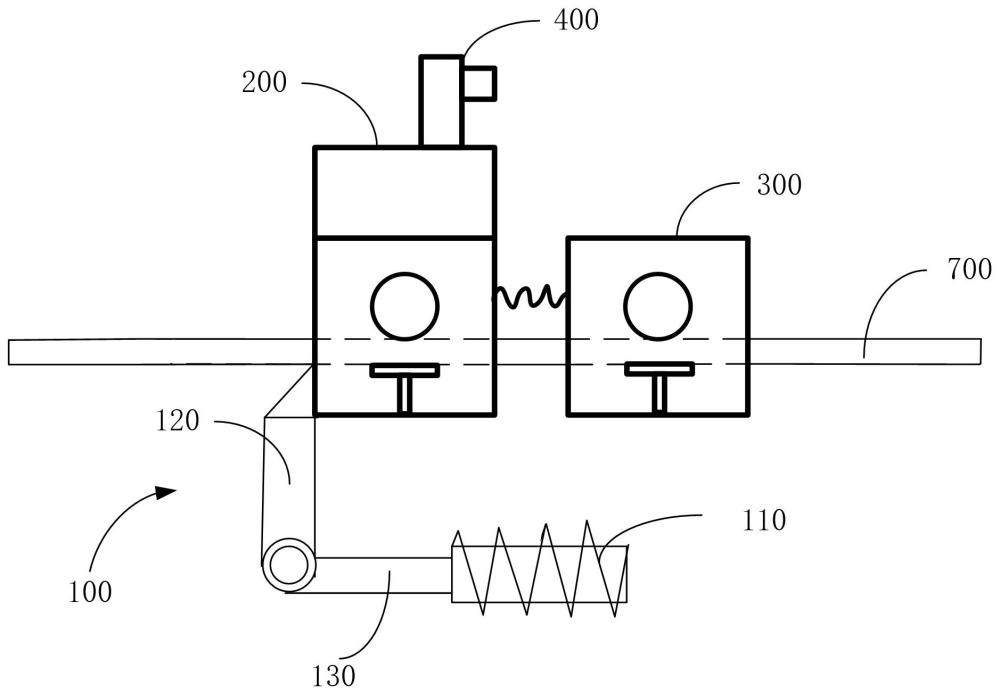
11、在其中一个实施例中,还包括牵引机构,所述牵引机构连接于所述移动机构,且设置于所述移动机构背离所述修剪机构的一侧,所述牵引机构能够安装在所述电线上,以在爬坡时牵引所述移动机构。
12、在其中一个实施例中,还包括绞盘和绞索,所述绞盘安装在所述移动机构上,所述绞索的一端连接于所述绞盘,另一端连接于所述牵引机构;
13、在爬坡时,所述牵引机构被配置为相对于所述移动机构向远离所述缠绕机构的方向运动,且运动预设距离后夹紧所述电线,所述绞索收缩并缠绕在所述绞盘上,以减小所述移动机构和所述牵引机构之间的距离,以带动所述移动机构和所述修剪机构爬坡。
14、在其中一个实施例中,还包括安装在所述移动机构上的监测机构,所述监测机构用于监测所述和所述牵引机构的实时运动状态。
15、在其中一个实施例中,还包括无人机,所述无人机用于带动所述移动机构和所述修剪机构移动。
技术特征:1.一种自动修剪树障的装置,其特征在于,所述自动修剪树障的装置包括:
2.根据权利要求1所述的自动修剪树障的装置,其特征在于,所述修剪机构还包括相连接的第一连接臂和第二连接臂,所述第一连接臂连接于所述移动机构,所述第二连接臂连接于所述刀片,所述第一连接臂和所述第二连接臂转动配合,以调节所述刀片的修剪角度。
3.根据权利要求1所述的自动修剪树障的装置,其特征在于,所述修剪机构包括驱动件,所述驱动件连接于所述刀片,所述驱动件能够驱动所述刀片转动。
4.根据权利要求1所述的自动修剪树障的装置,其特征在于,所述修剪机构还包括定位件,所述定位件具有开口,所述开口用于容纳修剪掉落的树木,以调节掉落的所述树木的倒伏方向。
5.根据权利要求1所述的自动修剪树障的装置,其特征在于,所述移动机构包括第一动力模块,所述第一动力模块包括相连接的第一动力驱动源和第一动力轮,所述第一动力驱动源能够驱动所述第一动力轮沿所述电线的长度方向滑动。
6.根据权利要求1所述的自动修剪树障的装置,其特征在于,所述移动机构包括还包括第一制动模块,所述第一制动模块包括第一刹车驱动源、第一移动刹车片以及第一固定刹车片,所述第一移动刹车片和所述第一固定刹车片沿所述电线的径向间隔排布,所述第一刹车驱动源连接于所述第一移动刹车片,所述第一刹车驱动源能够驱动所述第一移动刹车片沿所述径向向靠近所述第一固定刹车片的方向移动,以使所述第一移动刹车片和所述第一固定刹车片夹紧所述电线。
7.根据权利要求1所述的自动修剪树障的装置,其特征在于,还包括牵引机构,所述牵引机构连接于所述移动机构,且设置于所述移动机构背离所述修剪机构的一侧,所述牵引机构能够安装在所述电线上,以在爬坡时牵引所述移动机构。
8.根据权利要求7所述的自动修剪树障的装置,其特征在于,还包括绞盘和绞索,所述绞盘安装在所述移动机构上,所述绞索的一端连接于所述绞盘,另一端连接于所述牵引机构;
9.根据权利要求7所述的自动修剪树障的装置,其特征在于,还包括安装在所述移动机构上的监测机构,所述监测机构用于监测所述和所述牵引机构的实时运动状态。
10.根据权利要求1所述的自动修剪树障的装置,其特征在于,还包括无人机,所述无人机用于带动所述移动机构和所述修剪机构移动。
技术总结本申请涉及一种自动修剪树障的装置,包括修剪机构和移动机构,修剪机构包括刀片,刀片用于修剪树障;移动机构连接于修剪机构,移动机构能够沿电线的长度方向移动,以调节修剪机构和树障的相对位置。上述自动修剪树障的装置,修剪机构的刀片能够修剪路障,而将移动机构连接于修剪机构,移动机构能够沿电线的长度方向移动,从而带动刀片沿电线的长度方向移动,也就调节了修剪机构和树障的相对位置,进而调节了修剪区域。本申请提供的自动修剪树障的装置,移动机构带动修剪机构沿电线的长度方向移动,从而修剪了电线附近的树障,防止其损害电线的正常运行。而且,不需要人工操作,提高作业效率,降低了人工作业的风险。技术研发人员:和伟超,刘智健,李思源,董少波,黄凌宇,周俊丞,戚俊杰,岑炳聪,吴洪昌,曾誉,朱科任,吴清泉,董俊受保护的技术使用者:广东电网有限责任公司广州供电局技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240614/101501.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表