一种基于视觉感知与静电吸附的猕猴桃授粉机器人
- 国知局
- 2024-07-12 12:53:15
本发明涉及果树授粉装置,具体涉及一种基于视觉感知与静电吸附的猕猴桃精准授粉机器人。
背景技术:
1、猕猴桃作为雌雄异株植物,需要配套种植雄株。但是由于自然授粉还存在雌雄花期相遇不良、风媒授粉效果不理想、授粉昆虫数量不足等问题,导致授粉充分性和稳定性不足,出现果实产量低、品质差的情况。辅助授粉成为设施果园提高产量和品质的必要途径。
2、但目前果树辅助授粉主要为点授式、喷雾式等人工方式,虽研发有手持式辅助授粉器,但授粉作业仍费工费时,同时作业随意性强,授粉充分性和一致性因人而异,影响果树产出的稳定性和商品性。专用授粉机械缺乏,少量已报道的授粉机,未搭载智能化的精准控制系统,其自动化、智能化、精准化水平低,存在授粉质量不高、花粉用量大、增加后期疏果量和浪费植物养分等问题。因此有必要研发一种猕猴桃精准授粉装置,以期实现差异化花朵靶向精准授粉。
技术实现思路
1、针对现有技术中存在的不足和缺陷研发一种基于视觉感知与静电吸附的猕猴桃精准授粉机器人。
2、本发明为解决其技术问题,采用的技术方案如下:
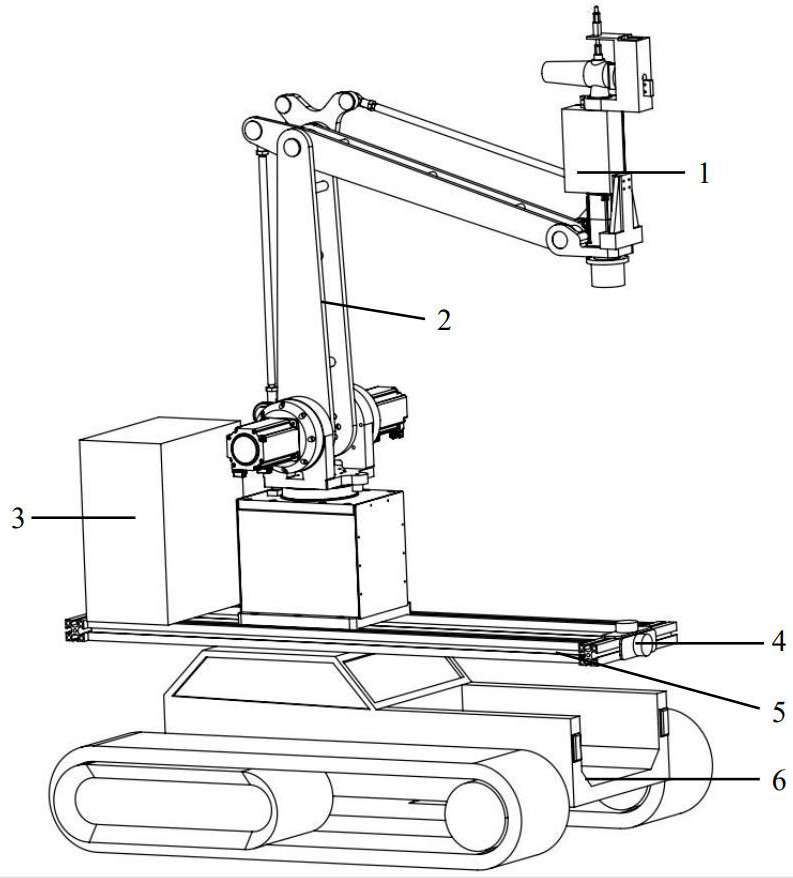
3、一种基于视觉感知与静电吸附的猕猴桃精准授粉机器人,其包括授粉机械臂、静电末端执行器、视觉感知系统、底盘总成、承载支架、总控制箱;
4、授粉机械臂包含机械臂控制箱、主构架、伺服电机、大臂、小臂、传动板、大臂水平保持连杆、小臂传动杆、三角保持架、小臂水平保持连杆、腕部。其中底座与底盘总成通过承载支架相固接,主构架与底座通过球铰相铰接,伺服电机与主构架相固接,传动板与大臂水平保持连杆通过球铰相铰接,三角保持架与大臂相固接,三角保持架与小臂传动杆和小臂水平保持连杆分别通过球铰相铰接,腕部与小臂相固接。
5、静电末端执行器包含喷头、静电发生装置、气动插头、花粉储存罐、风机模块、支架底座、舵机模块、调节旋钮、气管的组合结构;其中支架底座与授粉机械臂的腕部相固接,风机模块与支架底座相固接,舵机模块与风机模块相固接,调节旋钮与舵机模块相固接,花粉储存罐与舵机模块相固接,气动插头与花粉储存罐相固接,气管与气动插头相固接,静电发生装置与气管相固接,舵机模块、风机模块和静电发生装置分别与总控制箱电信连接。
6、视觉感知系统包含rgb-d相机a、rgb-d相机b和相机支架。其中,相机支架由abs材料制成。相机支架与承载支架相固接,rgb-d相机a与承载支架相固接。对待授粉区域的冠层采集图像并进行花朵检测,计算并输出优授花的三维坐标,为授粉机械臂路径规划提供位置信息。rgb-d相机b实时采集猕猴桃授粉区域道路图像,检测并定位道路两侧猕猴桃树干位置信息,根据视野中左右树干的距离变化调整底盘总成转向,当距离相等时走直线。保持猕猴桃授粉机器人在道路中间行驶。
7、本发明作业时,rgb-d相机b实时采集猕猴桃授粉区域道路图像,检测并定位道路两侧猕猴桃树干位置信息,根据视野中左右树干的距离变化调整底盘总成转向,当距离相等时走直线。保持猕猴桃授粉机器人在道路中间行驶。当猕猴桃授粉机器人行驶至待授粉区域,rgb-d相机a对待授粉区域的冠层采集图像并进行花朵检测,计算并输出优授花的三维坐标,为授粉机械臂路径规划提供位置信息。授粉机械臂运动,带动腕部的静电末端执行器对准优授花,静电发生装置与电机同时开启,花粉储存罐里的花粉通过气管进入喷头,花粉附着在雌蕊上,实现靶向授粉。
8、本发明所述一种基于视觉感知与静电吸附的猕猴桃精准授粉机器人采用以上技术方案与现有技术相比,具有以下技术效果:
9、 (1)本发明所设计一种基于视觉感知与静电吸附的猕猴桃精准授粉机器人,以rgb-d相机b实时采集猕猴桃授粉区域道路图像作为依据,由控制模块针对驱动装置载体进行行进控制,以及通过rgb-d相机a对待授粉区域的冠层采集图像并进行花朵检测确定优授花的三维坐标,再通过授粉机械臂实现静电末端执行器对待授粉花朵的精准对靶,并通过所设计静电末端执行器,实现向待授粉花朵的授粉操作,有效提高授粉对靶精度和效率;
10、 (2)本发明所设计一种基于视觉感知与静电授粉的猕猴桃精准授粉机器人中,针对静电末端执行器,具体设计为喷头、静电发生装置、气动插头、花粉储存罐、风机模块、支架底座、舵机模块、调节旋钮、气管的组合结构,总控制箱根据视觉感知系统的rgb-d相机a获取的花朵信息控制舵机模块旋转带动调节旋钮调节出粉量,实现了授粉操作,提高效率,同时与人工授粉相比,能节省花粉;
11、(3)本发明所设计一种基于视觉感知与静电吸附的猕猴桃精准授粉机器人中,rgb-d相机b实时采集猕猴桃授粉区域道路图像,检测并定位道路两侧猕猴桃树干位置信息,根据视野中左右树干的距离变化调整底盘总成转向。
技术特征:1.一种基于视觉感知与静电吸附的猕猴桃授粉机器人,包括静电末端执行器(1)、授粉机械臂(2)、总控制箱(3)、视觉感知系统(4)、承载支架(5)、底盘总成(6)六个部分,其特征在于:静电末端执行器(1)与授粉机械臂(2)的腕部(208)相固接,授粉机械臂(2)、总控制箱(3)、视觉感知系统(4)均与承载支架(5)相固接,承载支架(5)与底盘总成(6)相固接,总控制箱(3)分别与静电末端执行器(1)、授粉机械臂(2)、视觉感知系统(4)、底盘总成(6)相电信连接;
2.根据权利要求1所述的一种基于视觉感知与静电吸附的猕猴桃授粉机器人,其特征在于:rgb-d相机a(401)获取待授粉区域彩色图和对齐后的深度图之后,总控制箱(3)中运行目标检测程序处理彩色数据,结合深度图对花朵进行精准定位,得到各猕猴桃花朵以rgb-d相机a(401)为中心的空间坐标,通过相关计算及rgb-d相机a(401)与授粉机械臂(2)的位置关系获得猕猴桃花朵的世界坐标,最终按自定规则实现顺序授粉;
技术总结一种基于视觉感知与静电吸附的猕猴桃精准授粉机器人属于果树授粉装置技术领域;以视觉感知系统(4)所采集的图像作为导航路线及花朵定位依据,总控制箱(3)对底盘总成(6)进行运动控制,以及通过控制授粉机械臂(2)实现静电末端执行器(1)和待授粉花朵的精准对靶,实现向待授粉花朵的授粉操作,具有结构新颖、有效提高花粉附着量的特点。技术研发人员:傅隆生,丁煜松,史宇飞,高常青,辜煜,李瑞受保护的技术使用者:西北农林科技大学技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240614/101527.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。