用于维护农业用地的方法和系统与流程
- 国知局
- 2024-07-12 12:54:15
本发明涉及农业领域。更具体地,本发明涉及一种农业用地自动除杂草方法及相关的独立式系统。更具体地,本发明适用于大田作物,特别是用于控制取代农业用地上耕种的主要植物生长的次生植物,这些次生植物被称为杂草或更普遍地称为“野草”。
背景技术:
1、杂草控制对于在种植田地中获得显著产量是重要的,因为杂草可能成为田地中的优势植物,从而实际上减缓田地中耕种植物的生长。应当指出,这种控制通常在耕种后的前几周是重要的,此时耕种植物尚未达到足够重要的生长阶段,无法成为优势植物。
2、因此,通过除杂草来维护农业用地的技术是现有技术中已知的。
3、一般来说,这些除杂草技术使用比如草甘膦等除草剂,进行大面积施用以控制杂草。
4、这些技术的主要缺点是,尽管有效,但所使用的产品通常对周围的生态系统有害。
5、因此,随着立法对这样的植物卫生产品的使用越来越严格,既限制了处理期、也限制了活性成分的范围,以便减少植物生产中的残留物和自然环境中的扩散性污染,越来越倾向于采用比如机械除杂草的其他除杂草技术。
6、这些技术通常很麻烦,需要定期监测农业用地以按时执行除杂草操作,以便避免杂草在耕种田地上占优势。
7、为了克服这些缺点,已经开发了通过自动辨别杂草并对其执行除杂草操作来自动化这些除杂草任务的技术。
8、然而,这些技术通常基于定期穿过农业用地,以便能够尽快执行除杂草操作,其缺点是耗时且从能源角度来看成本很高。
9、在自动化方面,还开发了使用无人机对用地执行测绘的技术。这样的示例特别地在美国专利申请us 2017/0127606和俄罗斯专利ru 2710163中描述,该美国专利申请为根据用地的地形引导非自主农业机械,该俄罗斯专利为识别异常种植区域并且引导农业机械前往以处理该种植区域。更具体地,该俄罗斯专利描述了通过强对比度限定边界来对图像中的这种地块进行定界,而没有具体地辨别在所获取的图像中注意到的耕种物异常的起源。
10、当前的系统都无法允许同时满足所有需求,即无法提供一种用于对农业用地进行除杂草的独立技术,该技术对于生长在农业用地上的杂草是有效的,但不会破坏存在的耕种物,并且节能。
技术实现思路
1、本发明的主要目的是提供一种用于为农业用地有效除杂草的技术,从而允许及时控制耕种用地上生长的杂草。
2、本发明的另一个重要目的是确保在不使用对环境有害的植物卫生产品的情况下清除杂草。
3、本发明的另一个显著目的是提供一种特别是在农业用地处理任务的规划、优化和执行方面独立的技术。
4、本发明的另一个目的是提供一种与植物卫生控制手段具有竞争性的技术。
5、本发明的另一个目的是提供一种从能源角度优化的技术,同时尽可能生态友好。
6、本发明的另一个目的是提供一种稳健的并且适合于大田作物的技术。
7、为此,根据第一方面,本发明涉及一种用于维护农业用地的方法,该方法包括以下步骤:
8、- 由包括处理器和计算机存储器的计算设备根据农业用地的先前所获取的图像和/或根据农业工具的先前已经覆盖农业用地的地理位置数据来准备农业用地的地图,在所准备的地图中限定了多个种植区域,每个种植区域包括多个平行的种植行;
9、- 根据独立式车辆的初始位置和最终位置以及要处理的种植区域的位置,由计算设备向独立式车辆分配要处理的种植区域的列表;
10、- 考虑到要处理的种植区域的行的取向,根据向车辆分配的种植区域列表确定独立式车辆的行进计划;
11、- 使独立式车辆根据先前所建立的行进计划移动。
12、因此,独立式车辆以优化的方式在农业用地内移动,同时考虑了不同种植区域的相对位置以及要处理的每个种植区域的行的取向。
13、应当指出,种植区域中的每一个都包括平行的行。然而,不同种植区域的行很少彼此平行。一般地,种植行的取向对应于播种耕种物的农业机械在种植区域中建立的移动。
14、还应当指出,农业用地可能很广阔,尤其是在大田作物的情况下。大田作物应当理解为在包括多个大农业地块的农田上种植的作物,这些农业地块通常是不连续的,其土壤、地形或障碍物(天然的或非天然的,如石头、电线杆、沟渠、树篱、河流等)变化性大。
15、有利地,维护方法还包括如下步骤:由计算设备根据农业用地的覆盖每个种植区域的先前所获取的图像来生成对所有或部分种植区域内部的农事压力的诊断,对农事压力的诊断是根据种植区域中存在的杂草的性质以及这些杂草的数量和/或这些杂草的发育状态,并且其中,要由独立式车辆处理的种植区域列表根据与每个种植区域相关联的农事压力进行排序。
16、因此,根据对种植区域评估的农事压力划分种植区域的处理顺序的优先级。换言之,要优先处理的种植区域是比其他种植区域具有更高农事压力的种植区域,从而反映了密度更高和/或处于更高发育状态的杂草的存在。
17、因此,对农事压力的评估允许具有适当的信息来确定哪些种植区域要优先处理,从而优化独立式车辆对急需干预的区域的操作,以避免导致该区域中所选择的耕种植物的生长减缓。
18、此外,独立式车辆通常移动缓慢:在维护阶段为大约1 km/h,而在重新定位阶段为大约5 km/h。因此,对独立式车辆的干预藉由对农事压力的评估而得到最优规划。因此,农事压力在给定时间点时最高的区域可以被独立式车辆优先处理。
19、当然,应当指出,在编制要处理的种植区域的列表时,通常还考虑种植区域相对于独立式车辆位置的相对位置以及种植区域之间的相对位置,以便优化独立式车辆的路径,同时优先处理杂草所带来的农事压力高的种植区域。
20、在本发明的具体实施方式中,生成对农事压力的诊断的步骤包括如下子步骤:藉由先前在识别出杂草的图像的数据库上训练的自动学习方法来自动辨别图像中存在的杂草的性质。
21、通常,所辨别的杂草是图像中占优势的杂草。
22、自动学习方法(其例如是神经网络类型的)藉由该自动学习方法的在该自动学习方法的训练阶段期间生成的参数而允许辨别杂草的存在。一般地,训练分若干步骤执行,以便完善自动学习阶段的参数,从而基于先前识别出杂草的图像的数据库最佳地辨别图像中杂草的存在。
23、一般地,有利地,所获取的图像的视角与数据库中的图像的视角相似。例如,当所获取的图像是从上方捕获时,在主要以俯视图(即,根据竖直视角)捕获的图像的数据库上执行训练。
24、在本发明的具体实施方式中,生成农事压力诊断的步骤包括如下子步骤:根据至少一项测量到的和/或预测的气象数据,预测杂草的发育状态在给定时间点时的演变。
25、因此,对农事压力的评估更准确,因为它是根据至少一项气象数据,比如湿度测量、瞬时温度、风向。应当指出,气象数据可以在计算发育状态在给定时间点(通常是未来的给定时间点)时的预测演变时进行测量。因此,预测可以例如在一天、三天、五天、一周、十天、十五天、一个月或两个月内进行。
26、用于预测发育状态的气象参数也可以在相同的给定时间点或不同的给定时间点时进行预测。
27、在本发明的具体实施方式中,在维护方法实现多个独立式车辆的情况下,向独立式车辆分配的种植区域列表根据与每个种植区域相关联的农事压力和每个独立式车辆在给定时间点时的位置来考虑要处理的种植区域的顺序。
28、在本发明的具体实施方式中,在准备向独立式车辆分配的种植区域列表时,考虑了所述车辆在给定时间点时相对于用于为所述车辆充能的站点的自主性。
29、因此,车辆在已经对分配给该车辆的种植区域执行其维护操作之后,可以返回到站点,以便为独立式车辆内所包括的能量储存装置(比如电池或氢气罐)充能。
30、在本发明的具体实施方式中,维护方法还包括:根据覆盖种植区域的至少一个所获取的图像和/或根据在初步播种阶段期间所使用的播种工具的多个位置的记录,辨别所述种植区域的行的方向的步骤以及确定两行之间的间距,播种工具包括地理定位设备。
31、一般地,该勘测步骤与准备农业用地的地图的步骤同时执行,特别是为了能够在地图上限定种植区域内的平行种植行。
32、在本发明的特定实现方式中,该方法包括通过分析先前所辨别的行的方向而自动限定种植区域的步骤。
33、换言之,维护方法还包括如下步骤:藉由在覆盖种植区域的至少一个所获取的图像中和/或基于在先前播种阶段期间所使用的播种工具的多个位置的记录对所述种植区域的行的方向的自动辨别,自动地限定农业用地上的种植区域,播种工具包括地理定位设备。
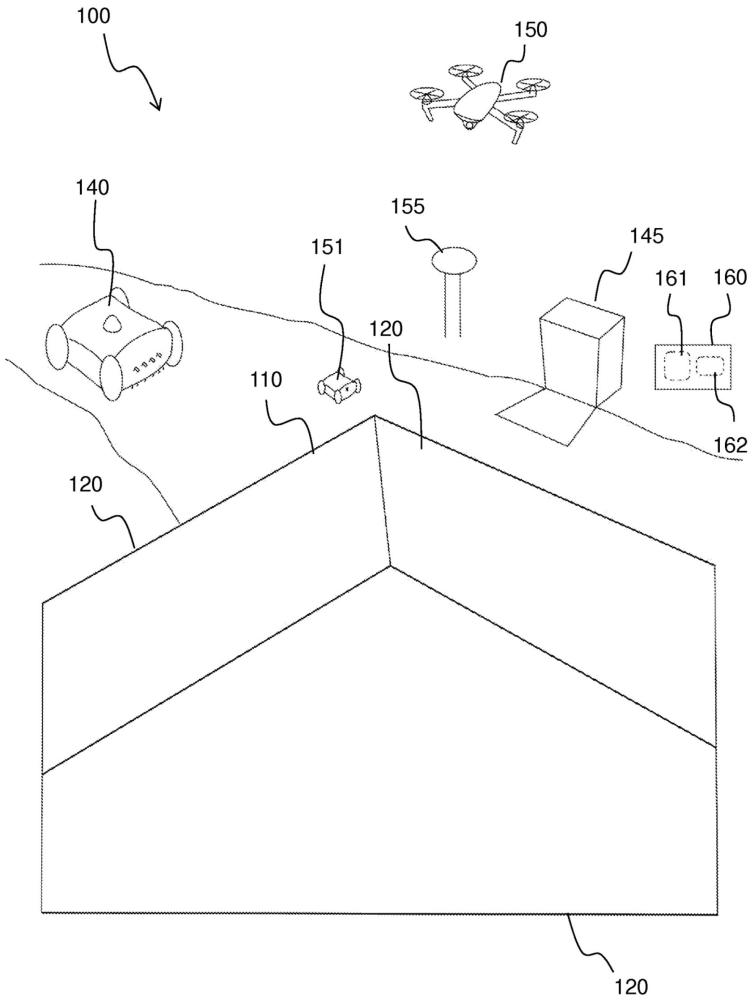
34、在本发明的特定实现方式中,维护方法还包括在先步骤:由至少一个独立式图像获取设备获取农业用地的图像。
35、有利地,独立式图像获取设备是独立式地面机器人或独立式航空器。一般地,独立式图像获取设备包括电机驱动的移动装置(比如轮子或螺旋桨)以及相机。
36、一般地,由独立式航空器获取的图像是在农用地面的竖直正上方捕获的航拍图像,以便限制视角效应。然而,可以设置的是,航空器从另一视角捕获农业用地的图像。
37、例如,独立式航空器可以是无人机,一般地,无人机设置有至少一个能够给无人机提供升力的螺旋桨、或者不带螺旋桨的飞翼。
38、在本发明的特定实现方式中,航空器为了进行测绘而以相对于农业用地的表面在一百米范围内的最大高度和/或为了建立杂草所带来的农事压力而以在三米范围内的最大高度在农业用地上飞行。
39、有利地,为了建立农业用地的区域中的农事压力而执行的飞行高度比为了进行测绘而执行的飞行高度低,以便获得分辨率更好的地面图像,从而允许更好地检测图像中存在的杂草的性质。一般地,这种飞行被称为极低高度飞行。
40、在本发明的实现方式中,维护方法包括如下步骤:在地图上确定禁止独立式车辆在其中移动的至少一个区域。
41、该禁止区域可以对应于存在妨碍独立式车辆在农业用地上自由移动的障碍物。障碍物可以是任何类型的,比如杆、树、河流等的存在。
42、禁止区域的建立可以由计算设备自动执行或者由操作者手动执行。
43、在本发明的实施方式中,维护方法还包括将耕种物类型与农业用地的至少一个种植区域相关联的步骤。
44、因此,可以根据种植区域中的耕种物类型的演变来完善农事压力的值。
45、此外,由于每种耕种物具有特定的特性,因此可以通过考虑例如适应于该耕种物的典型行宽来更好地评估独立式车辆的移动。
46、根据第二方面,本发明还涉及一种用于维护农业用地的系统,该系统包括计算设备和至少一个独立式车辆,该独立式车辆配备有被配置成执行农业用地维护操作的一套机械工具。
47、在这样的系统中,计算设备包括存储根据前述具实施方式中的任何一项的维护方法的指令的计算机存储器。
48、在本发明的特定实施方式中,维护系统还包括至少一个独立式图像获取设备。
49、例如,独立式图像获取设备可以是地面移动机器人(其可以被称为“ 漫游者 (rover)”)或航空器。
50、在本发明的特定实施方式中,维护系统还包括用于为独立式车辆和/或独立式图像获取设备充能的站点。
本文地址:https://www.jishuxx.com/zhuanli/20240614/101621.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表