一种扶正机构和木耳菌棒的全自动摆场机以及控制方法
- 国知局
- 2024-07-12 13:02:07
本发明涉及一种扶正机构和木耳菌棒的全自动摆场机以及控制方法,属于木耳栽种设备。
背景技术:
1、我国黑木耳的栽培技术主要有地栽黑木耳、代料栽培黑木耳等技术。地栽黑木耳技术也属于代料栽培,采用塑料袋栽培模式。配制培养料,以木屑、秸秆、玉米芯等为主,封装进塑料袋,制成圆柱形的菌棒,然后对培养料进行灭菌。然后给菌棒接种已选好的菌种,培养菌丝。长满菌丝后,将菌棒摆在田间大地,几天后可见开口处出现许多小黑点,即黑木耳原基。地栽黑木耳技术使黑木耳的栽培从林下栽培转变为田间大地栽培。
2、目前,黑木耳菌棒的摆场工作主要还是依靠人工,人工将扎孔后的菌棒摆放到大田里,时间成本高,人工劳动强度大。由于菌棒摆放的质量是直接影响黑木耳的采光、得水等的重要因素,进而影响木耳的产量。所以菌棒摆放时一般要求其摆放的质量在规定的范围内。而人工摆放时,菌棒之间的前后左右间距和排与列的整齐性也难以精确控制。
3、在人力成本快速上升、黑木耳需求量稳步增加的背景下,农业智能装备研发引起国家高度重视。与传统人工作业模式相比,农业智能装备能够显著降低劳动强度、提高作业效率、提升生产品质,有利于缓解劳动力短缺问题。
4、而目前国内外缺少相关的自动化黑木耳菌棒摆场机的控制系统的研究,国内外市场上还普遍缺乏一种能同时满足菌棒摆放质量规定的专用自动化设备。加之现代精准农业发展水平的不断提升,因此,具有控制系统的全自动黑木耳菌棒摆场机的研究与设计是黑木耳种植行业发展的必然趋势。
5、本背景技术中公开的信息仅用于理解本发明构思的背景,因此它能够包括不构成现有技术的信息。
技术实现思路
1、针对上述问题或上述问题之一,本发明的目的一在于提供一种扶正机构,通过设置伸缩件以及驱动源,从而形成可伸缩的菌棒下落通道,使得从高处落下的菌棒可以竖立于土地上,从而实现菌棒的自动摆场,并可以提高菌棒摆放的质量,降低人工成本,促进黑木耳种植自动化,节省大量人力物力,方案简单、实用,切实可行。
2、针对上述问题或上述问题之一,本发明的目的二在于提供一种木耳菌棒的全自动摆场机,通过设置料箱、料箱升降机构、推杆机构、间距传送带机构、扶正机构和行走车体,可实现菌棒自动摆场,提高菌棒摆放的质量,进而可以精确控制菌棒之间的前后左右间距和排与列的整齐性,填补目前黑木耳菌棒全自动摆场机械化空白,降低人工成本,促进黑木耳种植自动化,节省大量人力物力,促进黑木耳种植行业的发展。
3、针对上述问题或上述问题之一,本发明的目的三在于提供一种扶正机构和木耳菌棒的全自动摆场机以及控制方法,能够解决菌棒田间运输和摆场等繁琐工序,实现菌棒运输和摆场一体化设计,提高摆场效率。
4、为实现上述目的之一,本发明的第一种技术方案为:
5、一种菌棒的扶正机构,包括一个或多个用于扶正下落菌棒的伸缩件、能够驱动伸缩件拉长或/和缩短的驱动源;
6、伸缩件设有容纳菌棒的腔道,其能在驱动源的带动下,形成菌棒下落通道。
7、本发明经过不断探索以及试验,设置伸缩件以及驱动源,从而形成可伸缩的菌棒下落通道,使得从高处落下的菌棒可以竖立于土地上,从而实现菌棒的自动摆场,并可以提高菌棒摆放的质量,降低人工成本,促进黑木耳种植自动化,节省大量人力物力,方案简单、实用,切实可行。
8、作为优选技术措施:
9、伸缩件为伸缩风琴管或伸缩u型管或布袋;
10、或/和,驱动源为直线电机或装配有丝杠结构的电机或液压杆或气压杆。
11、作为优选技术措施:
12、驱动源为伺服电机;伸缩件为伸缩风琴管;
13、所述伺服电机通过一升降组件驱动一个或多个伸缩风琴管伸缩移动,扶正下落的菌棒,使得菌棒能直立于土地上;
14、升降组件包括下压支撑平台、铝型材框架、圆柱直线导轨、同步带、梯形丝杆、菌棒换向器;
15、伺服电机通过联轴器与梯形丝杆连接,通过同步带和同步轮结构带动下压支撑平台升降;
16、当菌棒从间距传送带落下来之前,下压支撑平台下降,把伸缩风琴管拉长形成下落通道,然后菌棒从通道中下落,能避免因落地冲击导致的翻倒,当菌棒落稳后下压支撑平台上升,扶正机构整体前进,进入下一行菌棒的摆场流程。
17、为实现上述目的之一,本发明的第二种技术方案为:
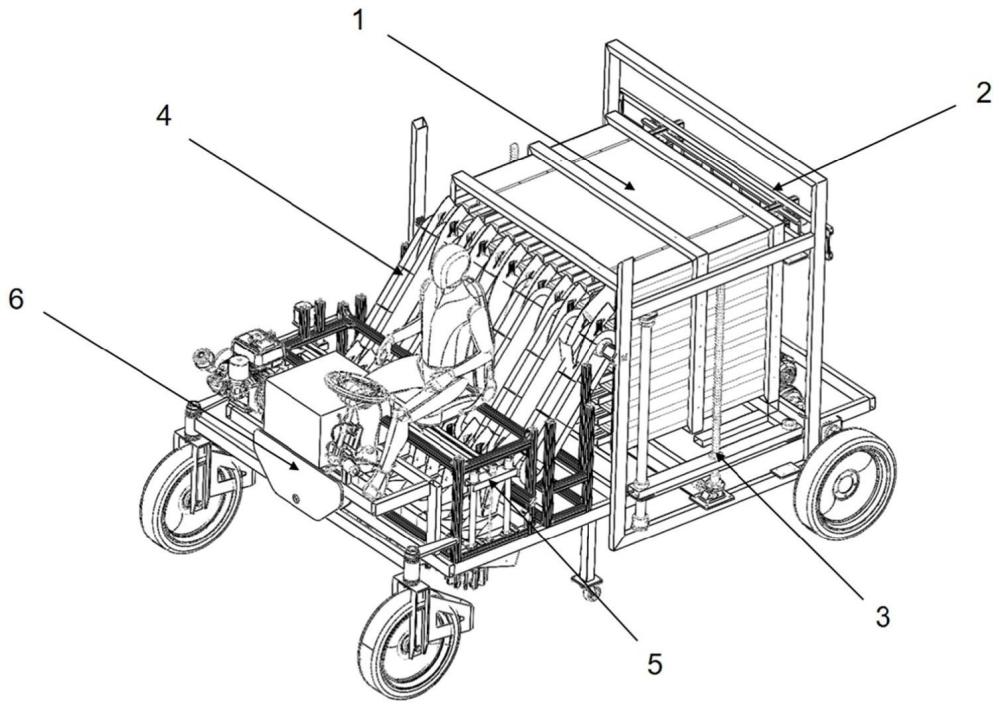
18、一种木耳菌棒的全自动摆场机,包括:料箱、料箱升降机构、推杆机构、间距传送带机构、扶正机构、行走车体;
19、料箱,设有若干菌棒通道,其用于装载菌棒;
20、料箱升降机构为丝杆—伺服电机升降机构,其用于实现料箱的换层,以便推杆机构逐层推送菌棒;
21、推杆机构,设有推杆,用于推送菌棒,推杆沿着料箱每一层底部的方管移动,达到推送菌棒的目的;
22、菌棒放入料箱后,料箱升降至待摆放的层与推杆机构在同一高度,推杆机构推动菌棒进入间距传送带机构中;
23、间距传送带机构,设有间距传送带,用于对从料箱里推出的菌棒进行同步输送;
24、扶正机构为上述所述的一种菌棒的扶正机构;
25、行走车体,设有电机或汽油机,其用于在菌棒摆放之前,装载和运输菌棒到田地摆放点;菌棒摆放时,其间歇前进控制每排菌棒的摆放距离。
26、本发明通过设置料箱、料箱升降机构、推杆机构、间距传送带机构、扶正机构和行走车体,可实现菌棒自动摆场,提高菌棒摆放的质量,进而可以精确控制菌棒之间的前后左右间距和排与列的整齐性,填补目前黑木耳菌棒全自动摆场机械化空白,降低人工成本,促进黑木耳种植自动化,节省大量人力物力,促进黑木耳种植行业的发展。
27、作为优选技术措施:
28、料箱的菌棒通道宽度为120mm,菌棒通道挡板高度为40mm,相邻菌棒通道间隔距离为267mm;料箱为前后贯通的箱体,至少有八层,每一层底部由三根横梁支撑,每一层至少有六个菌棒通道,每个菌棒通道能装载菌棒;
29、或/和,丝杆—伺服电机升降机构包括:升降平台框架、圆柱直线导轨一、升降平台、丝杆升降机、推杆悬停平台、电机换向器;伺服电机通过位于料箱升降机构底部的换向器,同时输出两个扭矩给左右两边的丝杆升降机,同步驱动丝杆升降机正转或反转,带动升降平台上升或下降。
30、作为优选技术措施:
31、推杆机构包括:四零系列伺服电机一、减速机、齿轮、推杆、四零系列伺服电机二、支撑底座;推杆为左右对称结构,由四零系列伺服电机一、四零系列伺服电机二驱动齿轮在齿条上行走,在支撑底座上带槽的滚轮的导向下,推杆沿着料箱每一层底部的方管移动,达到推送菌棒的目的;
32、或/和,间距传送带机构包括间距传送带、安装机架和无刷直流电机和链轮传动机构组成;间距传送带是一台具有6个通道的间距传送带,能同时输送6列菌棒,且每一通道上面均匀分布有隔板,同时最多装载3个菌棒;链轮传动机构能同时带动6个通道同步转动,用于间距传送带转动的动力来源;间距传送带用于对从料箱里推出的菌棒进行同步输送,将菌棒平稳地输送到下压刺孔机构;
33、或/和,扶正机构包括:驱动源、伸缩风琴管、下压支撑平台、铝型材框架、圆柱直线导轨二、同步带、梯形丝杆、菌棒换向器;
34、驱动源为八零系列伺服电机,伸缩件为伸缩风琴管;
35、八零系列伺服电机通过联轴器与丝杆直接连接,通过同步带和同步轮结构带动下压支撑平台升降;在菌棒从间距传送带落下来之前,下压支撑平台下降,把风琴管拉长形成下落通道,然后菌棒从通道中下落;
36、或/和,行走车体包括:车体、四十八伏锂电池、逆变器、六项异步电机、六项异步电机驱动器、光电测速编码器、调速模块、换挡模块;行走车体在菌棒摆放之前,装载和运输菌棒到田地摆放点;菌棒摆放时,其间歇前进控制每排菌棒的摆放距离;行走车体通过电机或汽油机驱动行走,且油电分离,能够手动操作控制或通过单片机控制实现电动智能控制;行走车体的方向通过方向盘控制;行走车体的速度通过调速模块设定;摆场机行进距离,单片机通过光电编码器的反馈,从而控制车体行进时间,到达固定距离后刹车停止,从而实现车体固定距离的行进,进而精确保证了菌棒摆放的排距。
37、作为优选技术措施:
38、还包括摆场机的控制系统包括:主控电柜、电源线、传感器、485通讯总线、手机app和串口屏;
39、所述485通讯总线的一端连接所述主控电柜,其另一端连接所述伺服电机驱动器;
40、所述电源线的一端连接所述主控电柜,其另一端连接所述电机;所述电源线以逆变器从底盘锂电池取电,驱动各部分组件的交流伺服电机和相关电机完成全自动摆场机的运作;
41、所述传感器主要包括槽型光电传感器、机械式碰撞开关和光电编码器;
42、对于料箱升降机构,其上装有槽型光电传感器、机械式碰撞开关;料箱升降机构的竖直型材机架上固定有黑色挡片,料箱升降机构上的槽型光电传感器用于检测物体的位置;料箱升降过程中,会带着固定在料箱上的槽型光电传感器同时升降,当槽口被黑色挡片阻挡,单片机系统能够捕捉槽型光电传感器的电压信号的变化,从而能够认为有物体进入或离开槽口;且竖直型材机架上固定有8个黑色挡片,与料箱的层一一对应;当槽型光电传感器经过某一黑色挡片处,意味着到达某一对应料箱层,用于料箱工作时的精确换层;料箱升降机构的机械式碰撞开关固定在行走车体机架上,始终位于料箱之下,不与料箱相连;当料箱下降过程中,料箱底部碰到此限位开关时就会停止下降,此时料箱回到原点,也就是最低点,完成位置复位;
43、对于推杆机构,机械式碰撞开关固定在推杆机构外固定机架上,当推杆将料箱某一层内菌棒推完后,料箱换层时推杆需要回归到推杆机构外固定机架处,当推杆碰到机械式碰撞开关时,单片机系统立即控制停止推杆的运动,于是推杆完成位置的回归;
44、对于扶正机构,机械式碰撞开关固定在扶正机构的固定机架型材的上部,下压支撑平台在下压扶正工作时下降,当下压支撑平台上升碰到机械式碰撞开关后,下压支撑平台停止上升,从而完成位置的回归;
45、对于间距传送带机构,机械式碰撞开关固定在间距传送带机构的固定机架型材上,由于间距传送带需要准确接收推杆机构推下来的菌棒和将菌棒送入扶正机构中,则其具有时停止时运行的特点,且间距传送带每转动一个间距时后立即停止;当间距传送带转动过程中,其上的间距挡片碰到机械式碰撞开关后,单片机系统立即控制停止间距传送带的运动,于是间距传送带完成一个间距的位移。
46、作为优选技术措施:
47、所述主控电柜包括主机stm32单片机控制器、光耦隔离模块、蓝牙模块、无极调速装置和继电器模块;
48、所述主机stm32单片机控制器为stm32zet6单片机,用来控制伺服电机转动,其包括推杆机构、扶正机构、料箱升降机构上的伺服电机控制,采用发送pwm脉冲的方式控制,以控制底盘行走机构行进及行进的距离,通过发出有无模拟电压的方式控制电机驱动器的速度输入接口,进而控制电机的启动和停止;
49、同时stm32zet6单片机,能用来开关量信号检测,并利用复位电路对mcu进行复位,实现控制系统的初始化;
50、所述光耦隔离模块,使被隔离的两部分电路之间没有电的直接连接,用于防止因有电连接而引起的干扰,隔离作用发生在伺服电机驱动器的与单片机的输出信号之间;光耦隔离模块还具有电平转换作用,将单片机输出的3.3v电压转换成5v输出给伺服电机驱动器;
51、所述蓝牙模块,用来实现手机app与单片机的串口通讯;
52、所述无级调速装置,用来实现间距传送带机构上的无刷直流电机的速度调节;通过转动调速模块实现功能;
53、所述继电器模块,与单片机连用,单片机输出高低电平控制继电器的开关进而控制无刷直流电机的开启与停止;
54、所述手机app,用来实时控制摆场机的动作和实时反馈摆场机的状态信息;其中,手机app能实现远程控制;
55、所述串口屏,通过串口与单片机通讯,通过rs485接口与伺服电机驱动器通讯,也是用来实时控制摆场机的动作和实时反馈摆场机的状态信息;其中,串口屏能实现远程控制,其控制界面包括手机app的控制界面的所有功能;串口屏控制界面还有操作伺服电机驱动器的读和写的功能,能够监视伺服电机的状态信息,状态信息包括报警信息或/和参数配置信息或/和电机实际速度或/和脉冲接收值;也能够通过控制单片机进而控制各个电机速度等;此外,串口屏能够显示,摆场机的工作信息,工作信息包括菌棒摆放个数、机构机器行进速度。
56、进一步,本发明提出了一种黑木耳菌棒的全自动摆放机器,简称摆场机。摆场机采用电动四轮底盘作为移动平台,以逆变器从底盘锂电池取电,驱动各部分组件的交流伺服电机和其他电机完成整个摆场流程的运作。设备总重为1500kg左右,摆场效率为12s/行。菌棒摆放效率应达到1800棒/小时,菌棒倾倒率≤5%,菌棒漏排率≤5%,菌棒损伤率≤5%。
57、为实现上述目的之一,本发明的第三种技术方案为:
58、一种用于木耳菌棒的全自动摆场控制方法,应用于上述所述的一种木耳菌棒的全自动摆场机,其包括以下步骤:
59、步骤一、将若干个菌棒装填进摆场机的料箱内;
60、步骤二、将机器开到田间后,将机器行走档位拨到前进档,并将方向盘打正,将车体行走切换到自动控制,单片机上电,用电池给单片机供电,摆场机的急停开关拉开整机上电,并按下伺服电机系统的供电线路开关;使用手机蓝牙调试器app连接单片机的蓝牙;
61、步骤三、使用手机蓝牙调试器app或串口屏进行机器控制;按下料箱复位和间距传送带复位按钮完成料箱和间距传送带的位置回零;
62、步骤四、按下一层自动按钮,摆场机会自动从料箱最上层的进行菌棒的田间摆放,完成后,料箱自动上升一层,完成料箱的换层;
63、步骤五、料箱换层结束后,继续按下一层自动按钮,且一层自动按钮按n次后,整车菌棒摆放结束,操作人员按下急停。
64、因而,本发明能够解决菌棒田间运输和摆场等繁琐工序,实现菌棒运输和摆场一体化设计,特制的一体式料箱可作为整体更换,可提高摆场效率;选用合适的触摸屏和手机app实现人机对话,让全自动摆放机成为智能工具;在软件控制方面,针对需要控制的机构及其所带电机类型,选择适合的控制方式及其控制算法,实现对摆场机的各个机构精确且稳定的控制。
65、作为优选技术措施:
66、进行一层菌棒田间摆放的方法如下:
67、s1、推杆在料箱内前进二个菌棒的距离;第一个菌棒的距离:推杆进入料箱内部,第一个菌棒的距离:第一排菌棒推入间距传送带的隔板间距中;
68、s2、间距传送带转动一个间距,推杆前进一个菌棒的距离,第二排菌棒推入间距传送带的隔板间距中,间距传送带转动一个间距,推杆前进一个菌棒的距离,第三排菌棒推入间距传送带的隔板间距中;
69、s3、扶正机构的下压支撑平台下降,使扶正机构上的套筒伸展完成;间距传送带转动一个间距,将菌棒输送至扶正机构的换向导槽中;竖直掉落地面;扶正机构上升回到原点,扶正机构上的套筒在下压机构的带动下收缩;行走车体自动向前行走小段固定距离;
70、s4、推杆前进一个菌棒的距离,第四排菌棒推入间距传送带的隔板间距中;
71、s5、重复s3;
72、s6、推杆前进一个菌棒的距离,第五排菌棒推入间距传送带的隔板间距中;之后推杆回归原点;
73、s7、重复s3三次;
74、s8、料箱上升一层。
75、与现有技术方案相比,本发明具有以下有益效果:
76、本发明经过不断探索以及试验,设置伸缩件以及驱动源,从而形成可伸缩的菌棒下落通道,使得从高处落下的菌棒可以竖立于土地上,从而实现菌棒的自动摆场,并可以提高菌棒摆放的质量,降低人工成本,促进黑木耳种植自动化,节省大量人力物力,方案简单、实用,切实可行。
77、进一步,本发明通过设置料箱、料箱升降机构、推杆机构、间距传送带机构、扶正机构和行走车体,可实现菌棒自动摆场,提高菌棒摆放的质量,进而可以精确控制菌棒之间的前后左右间距和排与列的整齐性,填补目前黑木耳菌棒全自动摆场机械化空白,降低人工成本,促进黑木耳种植自动化,节省大量人力物力,促进黑木耳种植行业的发展。
78、更进一步,本发明能够解决菌棒田间运输和摆场等繁琐工序,实现菌棒运输和摆场一体化设计,特制的一体式料箱可作为整体更换,可提高摆场效率;选用合适的触摸屏和手机app实现人机对话,让全自动摆放机成为智能工具;在软件控制方面,针对需要控制的机构及其所带电机类型,选择适合的控制方式及其控制算法,实现对摆场机的各个机构精确且稳定的控制。
本文地址:https://www.jishuxx.com/zhuanli/20240614/102409.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表