一种基于双无人机协作的莲蓬自动收获系统及方法
- 国知局
- 2024-07-12 13:10:38
本发明涉及一种基于双无人机协作的莲蓬自动收获系统及方法,属于水生蔬菜收获装备。
背景技术:
1、莲蓬是一种具有营养价值丰富和经济价值较高的水生经济作物。为了获得高营养价值的莲子,莲蓬需要在生长最盛时被选择性收获。受莲蓬形状外观和生长环境的影响,传统的人工采摘工作强度大、效率低。随着我国成为莲子、莲藕生产和出口大国,国内已经开始研发莲蓬的半自动化、自动化、智能化的采摘技术与装备。针对莲蓬离散型的复杂生长特性,以及种植面积大等作业环境,为了实现一次采摘作业的长时间续航,有必要设计一种功耗低并且采摘效率高的莲蓬自动采收装置。
技术实现思路
1、本发明在于提供一种基于双无人机协作的莲蓬自动收获系统及方法,通过设计引航无人机对采收无人机的采收作业飞行路径提前进行规划,并通过采收无人机上的双目视觉以及多方位采摘模块结合作业,对莲蓬进行进一步识别定位后进行采摘,可显著缩短采收无人机搜寻待收获莲蓬的时间,起到节省能源消耗并提高收获作业效率的作用。
2、为达到上述目的,本发明是采用下述技术方案实现的。
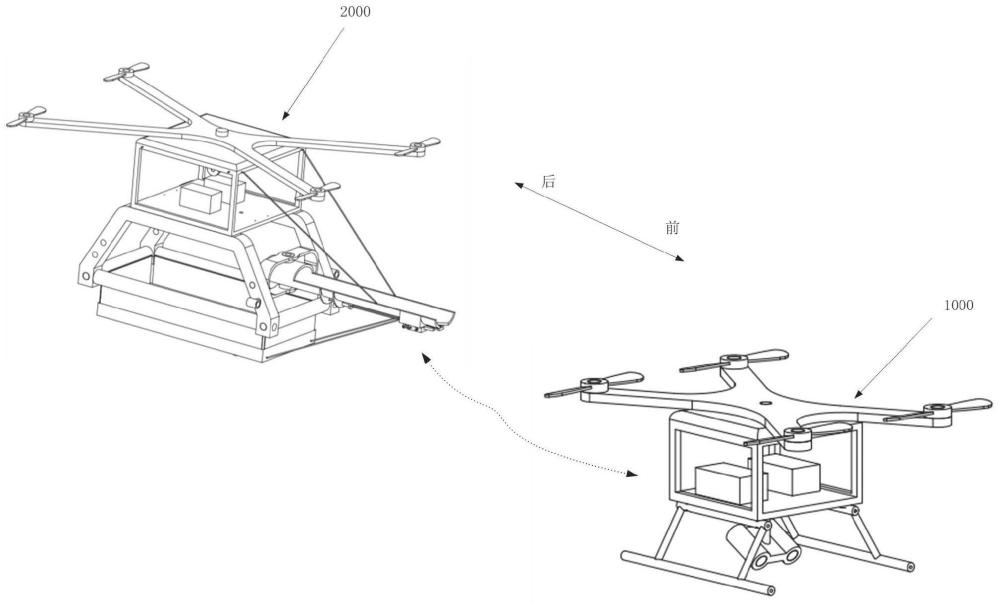
3、第一方面,本发明提供一种基于双无人机协作的莲蓬自动收获系统,包括载有粗识别定位模块和轨迹规划模块的引航无人机以及载有精识别定位模块和多方位采摘模块的采收无人机;
4、所述粗识别定位模块包括第一双目视觉,所述第一双目视觉转动吊装在所述引航无人机底部,用于捕捉莲蓬聚集处;
5、所述轨迹规划模块用于根据所述第一双目视觉的识别定位结果规划所述采收无人机在采收作业空间内的作业飞行路径;
6、所述精识别定位模块包括设置在所述采收无人机两侧的第二双目视觉,所述第二双目视觉用于捕捉待采摘的单支莲蓬;
7、所述多方位采摘模块包括采摘终端以及带动所述采摘终端多角度转动的调姿机构,所述调姿机构包括转动设置在所述采收无人机的飞行朝向端的摆臂,所述采摘终端包括安装在所述摆臂空接端底部的压切组件,所述压切组件具有大小可调的茎秆夹持空间。
8、可选地,所述采收无人机还包括暂存箱,所述暂存箱安装在所述采收无人机机体底部,用于存放所述采摘终端作业后的莲蓬。
9、可选地,所述调姿机构还包括摆座以及绳驱模组;
10、所述摆座悬空转动安装在所述采收无人机飞行朝向端的两侧支架之间,所述摆座中空设置并且其顶壁和底壁的对应位置上分别开设有供所述摆臂转动安装的安装孔;
11、所述绳驱模组包括设置于采收无人机机体顶端的第一放绳组、第二放绳组以及设置于所述暂存箱底端的第三放绳组、第四放绳组;
12、所述第一放绳组与第二放绳组的收放绳末端分别连接所述摆臂空接端顶部两侧,所述第三放绳组与第四放绳组的收放绳末端分别连接所述摆臂空接端底部两侧。
13、可选地,所述摆臂具有相互连接的u型槽体段以及柱型腔体段,所述柱型腔体段的下半部为u型槽体段的延伸;
14、所述柱型腔体段顶壁和底壁的对应位置上分别连接有安装轴,所述安装轴适应于结合所述摆座上的安装孔;
15、所述u型槽体段空接端开设有两侧边分别朝向所述u型槽体中心处聚拢的梯形缺口,所述梯形缺口的两侧边分别形成茎秆修正部,用于将待采摘莲蓬茎秆导向至所述摆臂空接端的中心处,所述梯形缺口的末端形成有矩形缺口状的茎秆容纳部,所述茎秆容纳部用于容纳导向至摆臂空接端中心处的莲蓬茎秆。
16、可选地,所述压切组件包括左指,右指,门型前杆架以及门型后杆架;
17、所述左指与右指分别具有调节端以及夹持端;
18、所述左指调节端与右指调节端均滑动套装在所述门型前杆架以及门型后杆架上,所述左指与右指之间的门型前杆架以及门型后杆架上分别套设有复位弹簧,所述左指和右指与所述门型前杆架以及门型后杆架的连接处外侧均设置有限位件;
19、所述右指夹持端形成有挤压部,所述左指夹持端形成有夹持切削部,所述挤压部与所述夹持切削部之间的夹持空间与所述茎秆容纳部位置对应,所述夹持空间大小可调。
20、可选地,所述夹持切削部包括连接所述左指调节端的固定板,安装在固定板内侧壁底端并朝向所述右指夹持端的切割刀以及滑动设置在所述切割刀顶部的可调节压块,所述可调节压块与所述右指挤压部位置相对;
21、所述固定板内侧壁上连接有沿所述切割刀延伸方向延伸的导向杆,所述可调节压块对应位置上开设有供所述导向杆穿过的通孔,所述导向杆上套设有避让弹簧。
22、可选地,所述采摘终端还包括调节组件;
23、所述调节组件包括驱动电机,传动组件,改向滑轮组件以及拉绳组件;
24、所述驱动电机设置在所述摆臂底部,所述传动组件包括丝杆以及与丝杆输出端螺纹孔相连的滑杆,所述丝杆输入端连接所述驱动电机的输出轴;
25、所述改向滑轮组件包括左侧改向滑轮组件以及右侧改向滑轮组件;
26、所述拉绳组件包括左侧拉绳以及右侧拉绳,所述左侧拉绳以及右侧拉绳的输入端分别连接所述丝杆输出端的左侧以及右侧;
27、所述左侧拉绳输出端通过所述左侧改向滑轮组件连接所述右指内侧壁,所述右侧拉绳输出端通过所述右侧改向滑轮组件连接所述左指内侧壁。
28、可选地,所述引航无人机还包括引航飞行控制模块以及图像处理模块;
29、所述引航飞行控制模块设置于所述引航无人机内部,其被配置用于根据所述第一双目视觉的识别定位结果控制所述引航无人机的飞行路线;
30、所述图像处理模块用于根据所述第一双目视觉捕捉到的图像信息测算该处待采摘莲蓬的坐标。
31、可选地,所述采收无人机还包括采摘飞行模块;
32、所述采摘飞行模块设置于所述采收无人机内部,其被配置用于根据所述引航无人机轨迹规划模块规划的飞行路线控制所述采收无人机的飞行路线,并根据所述第二双目视觉的识别定位结果控制所述调姿机构以及所述采摘终端协同配合对莲蓬进行采摘。
33、第二方面,本发明提供一种基于双无人机协作的莲蓬自动收获方法,应用如第一方面任一步所述的基于双无人机协作的莲蓬自动收获系统,包括:
34、采收作业前,所述引航无人机通过所述第一双目视觉捕捉荷塘中莲蓬的图像信息并通过所述轨迹规划模块规划采收无人机采收作业时的飞行路径;
35、采收作业时,所述采收无人机沿着所述引航无人机轨迹规划模块规划的飞行路线飞行,并根据所述第二双目视觉的识别定位结果,由所述调姿机构带动所述采摘终端对莲蓬进行采摘。
36、与现有技术相比,本发明所达到的有益效果:本发明针对莲蓬离散型生长特性,通过引航无人机给采收无人机提供有效的飞行轨迹,可有效缩短后者搜寻莲蓬的时间,节省能源消耗,延长续航时间,进而提高莲蓬收获效率;本发明针对莲蓬的自动生长环境,设计了一种轻型的调姿机构,通过绳驱模组控制摆臂动作并带动采摘终端对莲蓬进行收割,既有助降低采收无人机的功耗,也实现了对压切式采集终端在较大范围内的灵活调姿,能够进一步提高莲蓬收获效率;本发明通过设置茎秆修正部,在采摘莲蓬时便于将莲蓬茎秆导向至便于切割的位置,无需对莲蓬果柄进行十分精确的定位,降低了对第二双目视觉识别定位精度的要求,以简单的结构设计实现了对莲蓬的高效采摘。
本文地址:https://www.jishuxx.com/zhuanli/20240614/103354.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表