基于Arduino的全自动智能种树小车
- 国知局
- 2024-07-12 13:12:04
本技术涉及种树,特别的涉及基于arduino的全自动智能种树小车。
背景技术:
1、arduino的全自动智能种树小车是指基于arduino主控板的一个项目,旨在利用自动化技术和智能控制实现树木种植的自动化过程。
2、中国专利“一种沙地自动种树机”授权公告号“cn217546877 u”通过分树机构上的舵机转动带动压杆下压压条,压条带动压板下移使得压板和长条形水平通孔上侧边之间产生空隙,一棵树苗从间隙内滚出,掉落在正下方的导树槽上,并由导树槽滑落到挖好的树坑中,进而使自动种树操作简单。
3、树苗通过自身重力下落至导树槽内,再通过自上而下倾斜的导树槽滑入至树坑中,受到重力因素下树苗的根部会受到一定压缩和变形,导致树苗的根部受损,进而影响树苗的生长。
4、因此,提出基于arduino的全自动智能种树小车以解决上述问题。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供基于arduino的全自动智能种树小车,改善了树苗掉落至导树槽内,在通过导树槽滑入至坑内过程中,受到重力因素下树苗根部会受到一定压缩和变形的问题。
2、本实用新型通过以下技术方案来实现上述目的,基于arduino的全自动智能种树小车,包括:自动智能车,所述自动智能车的顶部设置有防护机构;其中,所述防护机构包括设置于自动智能车顶部的第一丝杆,所述第一丝杆的表面螺纹连接有工作框,所述工作框的内侧固定连接有第一电机,所述工作框的内壁转动连接有滑框,所述滑框的一端固定连接于第一电机的输出轴,所述滑框的一侧固定连接有第一夹块,所述滑框的内壁滑动连接有第二夹块,所述自动智能车的顶部设置有防护组件。
3、优选的,所述防护组件包括转动连接于滑框内壁的第二丝杆,所述第二夹块的内壁螺纹连接于第二丝杆的表面,所述第二丝杆的顶端固定连接有第二电机,所述第一丝杆的顶端固定连接有第三电机,所述自动智能车的顶部固定连接有放置框,所述第一丝杆的一端转动连接于放置框的内壁,第二电机的输出轴转动通过第二丝杆带动第二夹块下移,使第二夹块对树苗进行夹持固定,第一电机的输出轴转动带动滑框与树苗进行90度旋转,进而使树苗与树坑呈同一竖直水平线上,此时第三电机的输出轴转动通过第一丝杆带动树苗下移至树坑内,保证树苗在进入树坑内中,不会对树苗根部产生损伤,提高树苗的生长率。
4、优选的,所述第二夹块的底部固定连接有弹簧,所述弹簧的底端固定连接于滑框的内底壁,弹簧的弹性力用于增大第二夹块下移的阻力,避免第二夹块下移冲击力过大,进而对树苗产生损伤。
5、优选的,所述滑框的表面固定连接有从动块,所述工作框的一侧固定连接有阻挡块,阻挡块用于对从动块旋转的角度进行限位,使从动块只能旋转90度,保证树苗与树坑能够处于同一竖直水平线上。
6、优选的,所述第一夹块的一侧固定连接有限位块,限位块用于阻隔树苗滑出第一夹块上。
7、优选的,所述滑框的内壁固定连接有滑杆,所述第二夹块的内壁滑动连接于滑杆的表面,滑杆对移动中的第二夹块进行限位,避免第二夹块在移动中产生偏移。
8、优选的,所述放置框的内壁固定连接有导杆,所述工作框的内壁滑动连接于导杆的表面,所述导杆的表面固定连接有阻拦盘,所述阻拦盘的直径大于导杆的直径,导杆对移动中的工作框进行限位,避免工作框在移动中产生偏移,阻拦盘对上移的工作框进行限位,保证第一夹块上移的高度能够准确接收到滑落的树苗。
9、本实用新型的有益效果是:
10、1、第二电机的输出轴转动通过第一丝杆带动第二夹块下移,第二夹块下移中挤压弹簧,弹簧的作用下,使第二夹块缓慢下移并对第一夹块上的树苗进行夹持固定,启动第一电机,第一电机的输出轴转动带动滑框与树苗转动至90度,使树苗与树坑呈同一竖直水平线上,此时第三电机的输出轴转动通过第一丝杆带动工作框、滑框与树苗下移至树坑内,即可使树苗根部进入树坑内,保证树苗在进入树坑内中,不会对树苗根部产生损伤,提高树苗根部在进入树坑过程中的安全性,提高树苗的生长率;
11、2、导杆对移动中的工作框进行限位,避免工作框在移动中产生偏移,阻拦盘对上移的工作框进行限位,保证第一夹块上移的高度能够准确接收到滑落的树苗。
技术特征:1.基于arduino的全自动智能种树小车,其特征在于,包括:
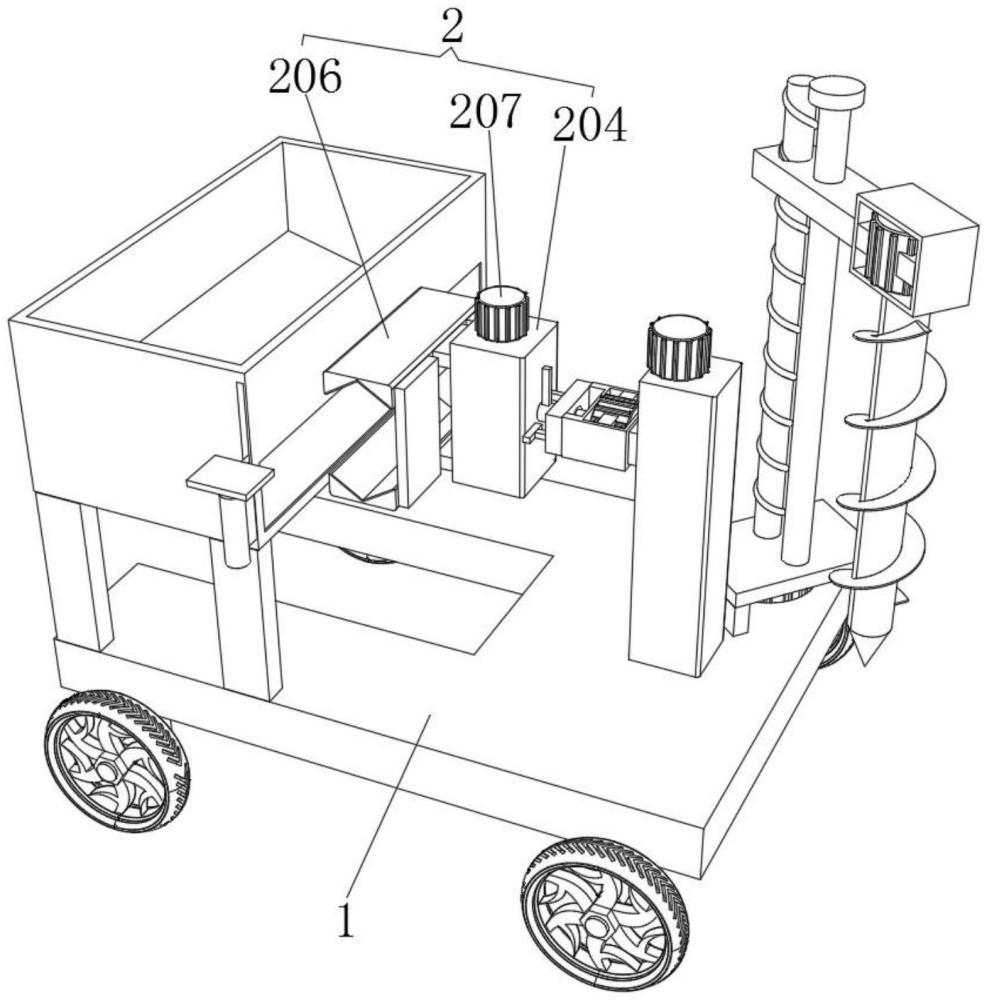
2.根据权利要求1所述的基于arduino的全自动智能种树小车,其特征在于:所述防护组件(207)包括转动连接于滑框(204)内壁的第二丝杆(2071),所述第二夹块(206)的内壁螺纹连接于第二丝杆(2071)的表面,所述第二丝杆(2071)的顶端固定连接有第二电机(2072),所述第一丝杆(201)的顶端固定连接有第三电机(2073),所述自动智能车(1)的顶部固定连接有放置框(2074),所述第一丝杆(201)的一端转动连接于放置框(2074)的内壁。
3.根据权利要求1所述的基于arduino的全自动智能种树小车,其特征在于:所述第二夹块(206)的底部固定连接有弹簧(2075),所述弹簧(2075)的底端固定连接于滑框(204)的内底壁。
4.根据权利要求1所述的基于arduino的全自动智能种树小车,其特征在于:所述滑框(204)的表面固定连接有从动块(2077),所述工作框(202)的一侧固定连接有阻挡块(2078)。
5.根据权利要求1所述的基于arduino的全自动智能种树小车,其特征在于:所述第一夹块(205)的一侧固定连接有限位块(2076)。
6.根据权利要求1所述的基于arduino的全自动智能种树小车,其特征在于:所述滑框(204)的内壁固定连接有滑杆(2079),所述第二夹块(206)的内壁滑动连接于滑杆(2079)的表面。
7.根据权利要求2所述的基于arduino的全自动智能种树小车,其特征在于:所述放置框(2074)的内壁固定连接有导杆(20710),所述工作框(202)的内壁滑动连接于导杆(20710)的表面。
8.根据权利要求7所述的基于arduino的全自动智能种树小车,其特征在于:所述导杆(20710)的表面固定连接有阻拦盘(20711),所述阻拦盘(20711)的直径大于导杆(20710)的直径。
技术总结本技术涉及种树技术领域,具体的说是基于Arduino的全自动智能种树小车,包括:自动智能车,所述自动智能车的顶部设置有防护机构;该装置中第二电机的输出轴转动通过第一丝杆带动第二夹块下移,第二夹块下移中挤压弹簧,弹簧的作用下,使第二夹块缓慢下移并对第一夹块上的树苗进行夹持固定,启动第一电机,第一电机的输出轴转动带动滑框与树苗转动至90度,使树苗与树坑呈同一竖直水平线上,此时第三电机的输出轴转动通过第一丝杆带动工作框、滑框与树苗下移至树坑内,即可使树苗根部进入树坑内,保证树苗在进入树坑内中,不会对树苗根部产生损伤,提高树苗根部在进入树坑过程中的安全性,提高树苗的生长率。技术研发人员:张海,姚博远,韩欣芸,姜小标,乔博伟,黄睿佳,李昭,毛艳鹏受保护的技术使用者:新疆大学技术研发日:20231129技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240614/103549.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表