一种高通过性、高稳定性的伐树电力机器人的制作方法
- 国知局
- 2024-07-12 13:13:44
本发明涉及树枝清理,特别是一种高通过性、高稳定性的伐树电力机器人。
背景技术:
1、在南方,由于自然环境的原因树木生长很快,高压线路上经常会有树枝搭接或驾其上生长,这样就会严重威胁电力系统的安全运行,对其必须进行安全处理,如果有大树长在了干扰电线的位置,则需要将树木砍伐掉,同时,在野外的电网环境也很复杂,尤其地面路况不同,针对这些状况的处理,需要设计一款适应性强的有效的带电伐树装备。
2、现在带电作业修剪树枝砍伐树木的机器人,在城市内都还可以,但是在城市外,野外环境下,尤其是在山区,就很难行进了,主要是对路况的适应能力很差,而且清理下来的树枝直接掉落在道路地面上时,会给交通流动带来障碍,并且对于后续的清理工作也会带来困难,进一步影响伐树机器人的通过性。
3、现有伐树机器人不能及时处理清理下来的树枝,树枝如果直接掉落在道路上,会对伐树机器人的行进造成阻碍,影响伐树机器人的通过性,但是如果直接对树枝进行收集,树枝体积太大,机器人上并不能装载很多树枝。
技术实现思路
1、鉴于现有技术中所存在的问题,提出了本发明。
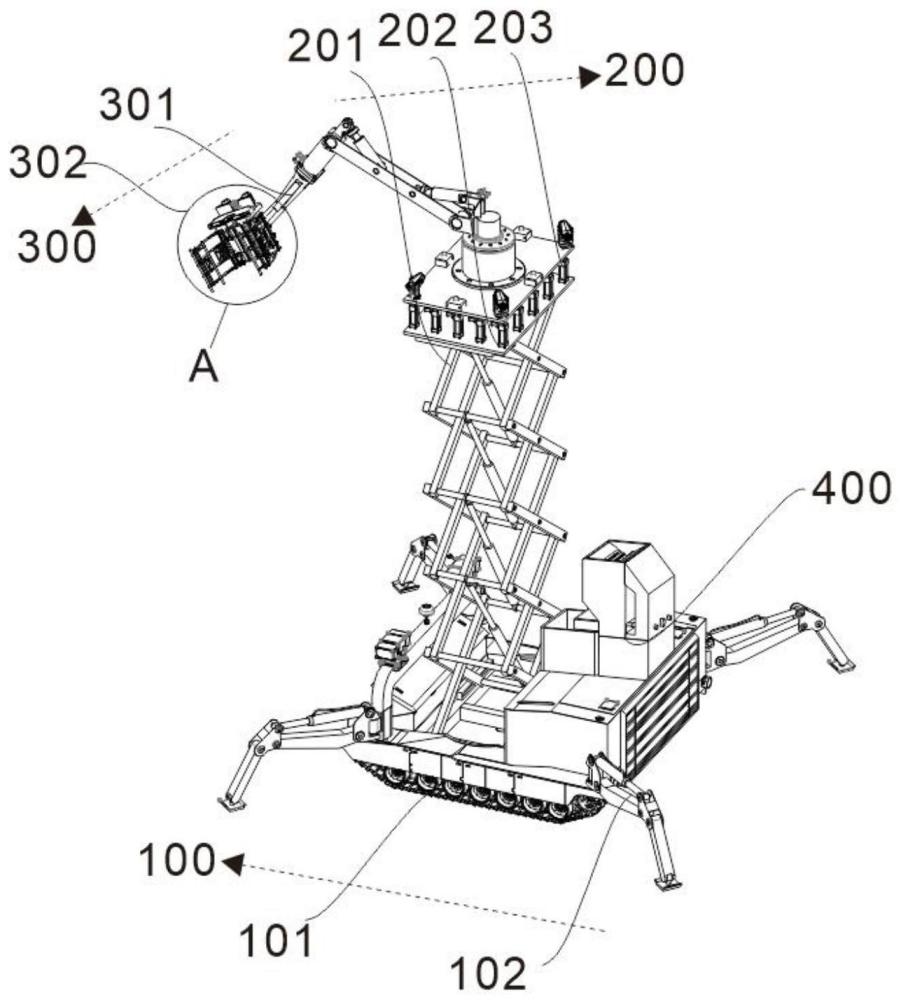
2、为解决上述技术问题,本发明提供如下技术方案:一种高通过性、高稳定性的伐树电力机器人,包括行走机构,所述行走机构的顶部设置有升降机构,所述升降机构的顶部设置有夹爪机构,所述升降机构的侧面设置有打包机构,所述打包机构设置于行走机构的顶部。
3、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述行走机构包括履带式底盘,所述履带式底盘的侧面设置有支撑杆。
4、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述升降机构包括设置于所述履带式底盘顶部的升降架,所述升降架的顶部设置有升降板,所述升降板的顶部设置液压杆组。
5、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述夹爪机构包括设置于液压杆组顶部的伸缩臂,所述伸缩臂的底部设置有夹持结构。
6、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述夹持结构包括设置于伸缩臂一端的连接板,所述连接板的侧面设置有夹持爪,所述连接板的顶部设置有圆锯。
7、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述打包机构包括外壳,所述外壳的侧面设置有电机,所述电机的输出轴设置有主动剪辊,所述主动剪辊远离电机的一端设置有主动齿轮,所述主动齿轮的侧面啮合有从动齿轮,所述从动齿轮的侧面设置有从动剪辊。
8、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述主动剪辊包括辊体,所述辊体的外壁设置有剪齿,所述剪齿有长有短,长剪齿和短剪齿间隔布置。
9、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述从动齿轮的侧面设置有摇杆,所述摇杆的底部设置有压块,所述压块的侧面设置有卡柱,所述卡柱的侧面设置有曲杆,所述曲杆的侧面与所述外壳连接,所述外壳的内壁设置有转板,所述转板设置于所述曲杆的顶部。
10、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述压块的底部设置有伸缩杆,所述伸缩杆设置于所述外壳的内壁,所述伸缩杆远离外壳的一端设置有方形框。
11、作为本发明所述高通过性、高稳定性的伐树电力机器人的一种优选方案,其中:所述外壳的底部设置有底座,所述底座的底部设置于履带式底盘的顶部,所述底座的侧面设置有打包框。
12、本发明的有益效果:本装置设置打包机构,当夹爪机构清理下来影响高压线路的树枝后,打包机构会将树枝剪成细小的短枝并进行压缩,压缩成块状后收集起来,防止树枝直接掉落在地上干扰机器人的行进,同时方便后续对树枝的收集,增多收集树枝的量。
技术特征:1.一种高通过性、高稳定性的伐树电力机器人,其特征在于:包括,
2.如权利要求1所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述行走机构(100)包括履带式底盘(101),所述履带式底盘(101)的侧面设置有支撑杆(102)。
3.如权利要求2所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述升降机构(200)包括设置于所述履带式底盘(101)顶部的升降架(201),所述升降架(201)的顶部设置有升降板(202),所述升降板(202)的顶部设置液压杆组(203)。
4.如权利要求3所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述夹爪机构(300)包括设置于液压杆组(203)顶部的伸缩臂(301),所述伸缩臂(301)的底部设置有夹持结构(302)。
5.如权利要求4所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述夹持结构(302)包括设置于伸缩臂(301)一端的连接板(302a),所述连接板(302a)的侧面设置有夹持爪(302b),所述连接板(302a)的顶部设置有圆锯(302c)。
6.如权利要求1所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述打包机构(400)包括外壳(401),所述外壳(401)的侧面设置有电机(402),所述电机(402)的输出轴设置有主动剪辊(403),所述主动剪辊(403)远离电机(402)的一端设置有主动齿轮(404),所述主动齿轮(404)的侧面啮合有从动齿轮(405),所述从动齿轮(405)的侧面设置有从动剪辊(406)。
7.如权利要求6所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述主动剪辊(403)包括辊体(403a),所述辊体(403a)的外壁设置有剪齿(403b),所述剪齿(403b)有长有短,长剪齿和短剪齿间隔布置。
8.如权利要求6所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述从动齿轮(405)的侧面设置有摇杆(407),所述摇杆(407)的底部设置有压块(408),所述压块(408)的侧面设置有卡柱(409),所述卡柱(409)的侧面设置有曲杆(410),所述曲杆(410)的侧面与所述外壳(401)连接,所述外壳(401)的内壁设置有转板(411),所述转板(411)设置于所述曲杆(410)的顶部。
9.如权利要求8所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述压块(408)的底部设置有伸缩杆(412),所述伸缩杆(412)设置于所述外壳(401)的内壁,所述伸缩杆(412)远离外壳(401)的一端设置有方形框(413)。
10.如权利要求9所述的高通过性、高稳定性的伐树电力机器人,其特征在于:所述外壳(401)的底部设置有底座(414),所述底座(414)的底部设置于履带式底盘(101)的顶部,所述底座(414)的侧面设置有打包框(415)。
技术总结本发明涉及树枝清理技术领域,特别是一种高通过性、高稳定性的伐树电力机器人,包括行走机构,所述行走机构的顶部设置有升降机构,所述升降机构的顶部设置有夹爪机构,所述升降机构的侧面设置有打包机构,所述打包机构设置于行走机构的顶部,所述打包机构包括外壳,所述外壳的侧面设置有电机,所述电机的输出轴设置有主动剪辊,所述主动剪辊远离电机的一端设置有主动齿轮,所述主动齿轮的侧面啮合有从动齿轮,所述从动齿轮的侧面设置有从动剪辊,当夹爪机构清理下来影响高压线路的树枝后,打包机构会将树枝剪成细小的短枝并进行压缩,压缩成块状后收集起来,防止树枝掉落在地上干扰机器人的行进,同时方便后续对树枝的收集。技术研发人员:陈钦柱,周言,吴良受保护的技术使用者:海南电网有限责任公司电力科学研究院技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240614/103746.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表