一种巡检式双光智能检测的鸟类驱散系统及方法与流程
- 国知局
- 2024-07-12 13:16:10
本发明属于机械电子工程与电力电网,具体地说是一种巡检式双光智能检测的鸟类驱散系统及方法。
背景技术:
1、电站作为电力系统中对电压和电流进行变换的场所,包含了生产输送、分配、使用电能的设备,主要包括变压器、高压断路器、隔离开关、母线、避雷器、电容器、电抗器等。这些一次设备大多都是开放性的。变电站选址一般都是选于郊区或山区,远离城市中心,因为自然条件好,鸟类容易聚集。在繁殖季节,鸟类喜欢在变电站内铁架上筑巢。鸟巢可能会导致一次设备的绝缘安全距离缩短,或者鸟类的粪便排放到绝缘瓷瓶上会降低瓷瓶串的绝缘强度,在特殊情况下可能造成接地故障,导致事故跳闸,因此变电站必须定期开展清除鸟巢的工作。近几年来因自然环境的改善,鸟害引起的跳闸呈上升趋势,由此造成的损失也越来越大,所以线路的防鸟害工作刻不容缓。
2、根据统计,鸟类活动引起的线路故障与雷害和外力破坏并列,成为导致电网系统产生严重危害的条件之一。十年之间华中地区电网220kv以上线路共发生鸟害造成的线路跳闸35次,占周期各类障碍跳闸总数的68.63%。与航空运输业一样,飞鸟有时会对电力设施的安全带来威胁,会引起及其严重的后果。
3、为解决变电站鸟害问题,确保电力设备稳定运行。目前电力公司采用了很多防治鸟害的措施,比如涂刷红油漆、安装风铃、使用转动的风车、安装防鸟罩或防鸟刺、人工驱鸟等。但这些驱鸟手段或者材质容易老化,或者防鸟范围有限,或者需要大量人力、物力,均不具备良好的防鸟效果;且鸟类很容易适应,一段时间后驱鸟效果不佳。因此,如何治理变电站鸟害问题已刻不容缓。而目前变电站使用的传统防鸟装置技术性和经济性较差,严重影响防鸟效果。
4、随着机器人技术的提高,工业化的进步,电网电力系统智能化、先进化的运行理念深入人心。能够研制出一款技术先进、性能优越、智能且覆盖范围广的变电站驱鸟装置成为当前智能电网建设过程中迫切需要解决的难题。面对电力系统智能化升级的需求,巡检式变电站驱鸟机器人产业化前景广阔。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种巡检式双光智能检测的鸟类驱散系统及方法,该装置识别范围广、工作速度快、安装方便、驱鸟效果好。
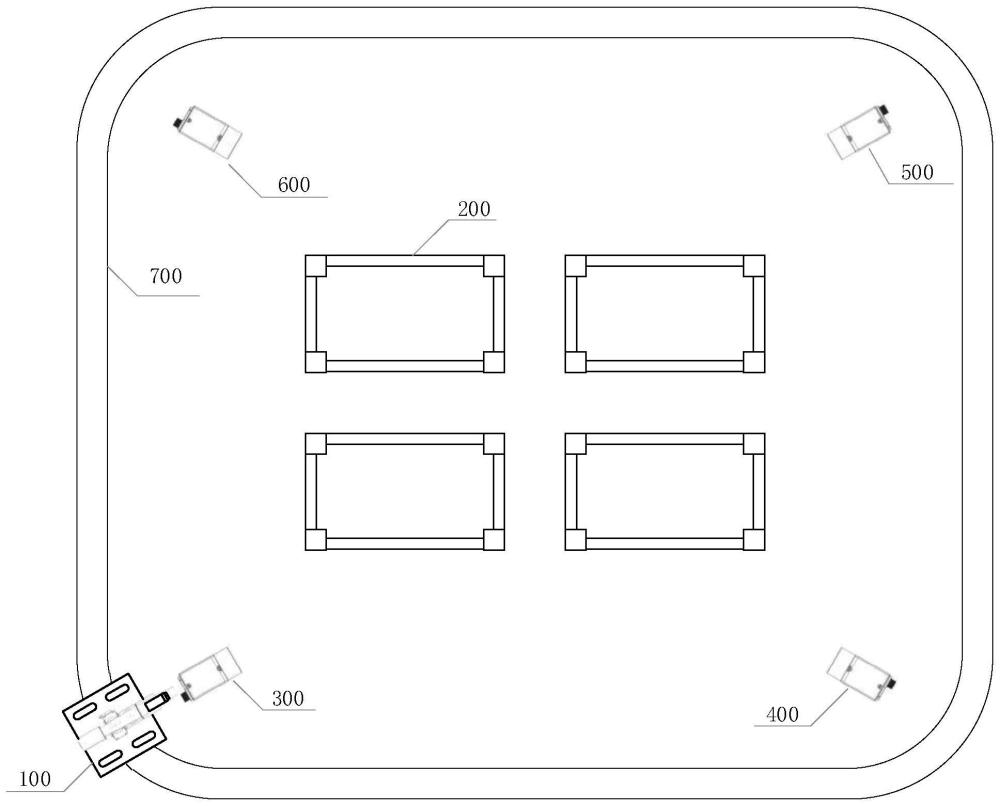
2、本发明为实现上述目的所采用的技术方案是:一种巡检式双光智能检测的鸟类驱散系统,包括:主控制器以及与其相连的可见光相机组件、导轨以及声波驱鸟炮组件;
3、其中,所述声波驱鸟炮组件设置在导轨上,所述导轨围绕电力设备一圈呈正方形设置,且电力设备任意一侧的导轨与电力设备的距离相等,且正方形的导轨的四个转角为圆弧形,供声波驱鸟炮组件实现转弯操作;
4、所述可见光相机组件有四个,设置于正方形的导轨的四个转角处;用于将捕捉到的图像中鸟类目标位置信息发送至主控制器;
5、所述主控制器,与声波驱鸟炮组件连接,用于接收可见光相机组件捕捉的图像中鸟类目标位置信息,并发送至声波驱鸟炮组件,以驱动导轨上的声波驱鸟炮组件到达发现鸟类目标的可见光相机组件转角处,使声波驱鸟炮组件执行对准动作。
6、所述声波驱鸟炮组件包括:驱鸟炮底座、二维电动转台、驱鸟炮底座安装板、控制点火器、接口气管、炮筒、炮筒双光相机以及导轨滚轮;
7、所述驱鸟炮底座下设有多个导轨滚轮以使声波驱鸟炮组件可沿导轨运动;所述二维电动转台的底座通过支柱安装在驱鸟炮底座上,二维电动转台上设有驱鸟炮底座安装板;所述驱鸟炮底座安装板上通过连接件与炮筒外壁上的衔铁连接,实现二维电动转台带动炮筒进行周向、俯仰转动;
8、所述接口气管设置在炮筒上,用于为炮筒内注入煤气;
9、所述控制点火器与炮筒连接,用于激发点火,引爆炮筒内煤气,发出声波进行驱鸟;
10、所述炮筒双光相机设于炮筒上,用于使炮筒双光相机的对准方向与可见光相机组件捕捉鸟类目标方向相重合,以实现双目视觉定位。
11、炮筒双光相机为红外与可见光相机。
12、所述可见光相机组件包括:相机底座、位姿调整器和可见光相机;所述位姿调整器通过支柱固定在相机底座上,相机底座通过多个螺钉与地面固连,所述位姿调整器与可见光相机的外壁固连,控制可见光相机进行周向、俯仰转动并捕捉鸟类图像。
13、所述接口气管连接煤气输入源,接口气管上设有煤气电磁阀,所述煤气电磁阀与主控制器电气连接,通过主控制器控制煤气电磁阀打开,使气体进入驱鸟炮炮膛。
14、一种基于双光相机智能检测的鸟类驱散方法,包括以下步骤:
15、1)在电力设备及声波驱鸟炮组件上安装标志靶点,对可见光相机组件及声波驱鸟炮组件上的相机进行标定,确定声波驱鸟炮组件上炮筒双光相机及声波驱鸟炮组件之间的相对位置关系;
16、2)鸟类目标进入可见光相机组件的视场范围内,可见光相机组件锁定鸟类目标,并获得可见光相机组件相对于鸟类目标的射线方向ob;
17、3)声波驱鸟炮组件判断移动至某一个可见光相机组件;
18、4)声波驱鸟炮组件在导轨上移动,使固定在声波驱鸟炮组件上的炮筒双光相机的光轴与ob平行,炮筒双光相机再次确定更新后的鸟类方向;
19、5)炮筒双光相机实时反馈鸟类目标当前方向信息至主控制器,同时主控制器根据鸟类目标当前方向信息调解声波驱鸟炮组件的位姿;
20、6)对准动作完成时,主控制器发出指令至声波驱鸟炮组件,调节二维电动转台,根据鸟类目标方向对鸟类目标进行对准,同时煤气电磁阀打开阀门,并触发声波驱鸟炮的控制点火器进行点火,引爆炮筒内煤气并发出声波进行驱鸟。
21、步骤2)获得可见光相机组件相对于鸟类目标的射线方向ob,具体为:
22、其观测坐标系为o3-x3y3z3,对应的可见光相机组件中射线方向ob为:
23、
24、上式中(xb,yb,zb)为鸟类目标与可见光相机组件三维坐标轴原点构成的射线ob方向向量,fx fy cx cy为相机的内参系数由相机标定得到,(u,v)分别为鸟类目标点在相机所形成图像中的坐标。
25、步骤3)具体为:
26、当只有一台可见光相机组件捕捉到一个鸟类目标时,主控制器驱动声波驱鸟炮组件至该可见光相机组件处;
27、当运行时有多台固定相机同时捕获到同一鸟类动态目标,此时由主控制器判定距离鸟类目标最近的相机数据为有效数据;
28、若运行时同时出现了多个鸟类动态目标,由主控制器判定鸟类动态目标距离设备的远近,将鸟类目标由远及近逐次驱离。
29、步骤4)中,所述炮筒双光相机再次确定鸟类方向,具体为:
30、固定在驱鸟炮上的炮筒双光相机再次确定更新后的鸟类目标方向,即:
31、
32、其中,λ为比例因子。
33、本发明具有以下有益效果及优点:
34、1.本发明采用移动双光相机进行识别。其识别范围大、运算速度快,能够自动识别并且准确率高。本方案采用红外信息确认动物目标,尤其是对鸟害主要群体中大型鸟类如东方白鹳、黑鹳、老鹰及秃鹫等识别率高。
35、2.本发明将识别的鸟类位置返回导轨系统,导轨系统移动驱鸟炮到指定位置采用高爆声波驱鸟炮定向完成鸟类驱散,采用这种移动而非固定的声波,扩大了驱鸟范围。
36、3.本发明采用多单元模块化设计,全方位智能驱鸟机器人通过多单元配合发挥作用,使得系统针对不同的变电站适用性大大加强。各个单元可以根据实际需要进行位置调整。并且每个单元结构简单,方便安装与调整。
37、4.本发明采用高爆声波方式进行驱鸟作业,不仅可以有效驱逐鸟害,同时对鸟儿不会造成任何损伤,保护自然生态环境平衡。
本文地址:https://www.jishuxx.com/zhuanli/20240614/104033.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表