一种蛇形机械臂香榧果采摘收集装置
- 国知局
- 2024-07-12 13:16:49
本发明涉及无人机采摘,具体为一种蛇形机械臂香榧果采摘收集装置。
背景技术:
1、香榧是中国特有的经济树种,也是全球稀有的树种之一。其主要生长在中国南方较为湿润的地区,生长环境包括海拔1400米以下的地区,这些地方温暖多雨,土壤多为黄壤或红壤。香榧果营养丰富,风味香醇,含有乙酸芳樟脂和玫瑰香油,是提炼多种高级芳香油的珍贵原料。此外,香榧果仁还具有多种营养成分,具有极高的营养价值和药用价值。
2、目前,采摘香榧果仍是依靠人工采摘,如利用娱蚣梯爬到树上采摘,作业位置高且空间移动不便,因此采摘效率不高。且由于香框树湿滑、树枝容易断裂经常发生坠人事故,采摘代价十分高昂。因此,为了降低香榧果的采摘成本,自动采摘香榧果机器的开发与研究是非常有意义的。
3、现有技术中,申请专利号为cn102577754b的专利文献公开了一种自动香榧采摘机,包括车轮、底座、升降装置、托板、采摘装置、柔性收集装置。其中:车轮与驱动电机连接,升降装置由三组剪叉机构组成,柔性收集装置安装于托板上。该装置从一定程度上解决了现有技术中由于香榧果生长区域较高,人工采摘不便,以及由于香榧果实分离力大,香榧枝条韧性强等恶劣的自然条件而导致香榧果采摘过程中出现采摘失败的问题。但使用该方式采摘香榧仍需要人工操作机器,容易出现操作不当造成果实掉落丢失,甚至出现损伤香榧树等情况,而且对于操纵机器人员的技术要求很高,大大增加了采摘的难度。
4、此外,使用该自动香榧采摘机进行采摘作业时,需不断调整机器的位置,使其位于采摘位置的正下方。对于某些地面崎岖的情况,无法保证机器的平衡,从而无法进行作业。此外,由于升降机构的限制,也会造成无法采摘高处香榧果的情况。
技术实现思路
1、针对现有技术的缺陷,本发明提供了一种蛇形机械臂香榧果采摘收集装置,该装置主要基于蛇形机械臂进行设计。该装置以无人机为移动平台,搭载采摘末端执行器,能够在高空环境下灵活高效地完成采摘任务,相比于传统的地面采摘机器人,该装置在三维空间中具有更高的自由度和灵活性,能够更好地适应各种复杂环境;
2、对这种采摘无人机装置进行深入研究,不仅可以有效拓宽采摘机器人的应用范围,还能够帮助实现对长势较高的果树以及山间果园的采摘。这将极大地降低采摘成本,并降低人工采摘的风险。因此,这种基于具有蛇形机械臂的无人机的香榧果采摘收集装置具有很高的发明价值和广阔的应用前景。
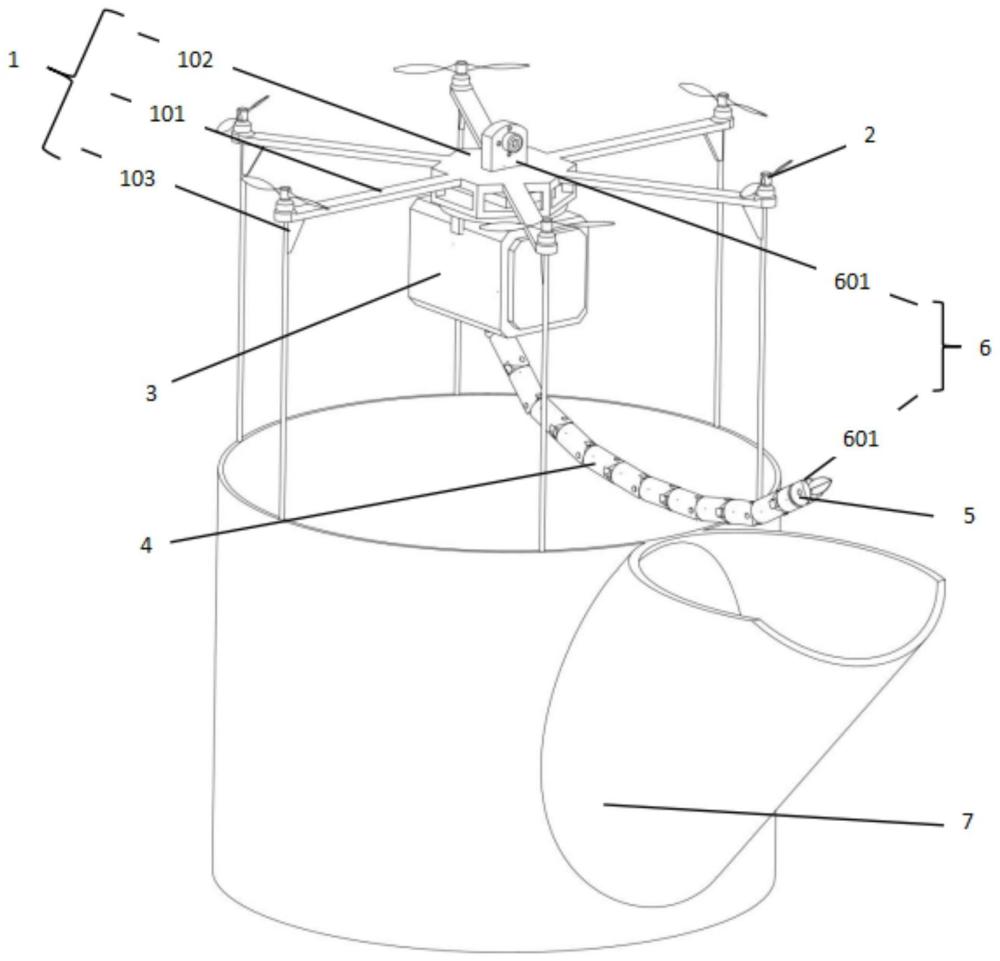
3、为实现上述目的,本发明提供如下技术方案:一种蛇形机械臂香榧果采摘收集装置,包括采摘无人机机身、无人机螺旋桨、智能控制主体机箱、蛇形机械臂、树枝剪切机构、摄像头组和香榧果存储箱,所述采摘无人机机身是由螺旋桨支撑杆、无人机主体和绳索连接端组合而成,无人机主机外侧等距离设置有多个螺旋桨支撑杆,且螺旋桨支撑杆远离无人机主机的一侧下方设置有绳索连接端,所述绳索连接端下方挂设有绳索,采集无人机机身通过绳索连接端活动连接有香榧果存储箱,所述采摘无人机机身通过螺旋桨支撑杆固定连接有无人机螺旋桨,且采摘无人机机身下方设置有智能控制主体机箱,所述智能控制主体机箱下方设置有蛇形机械臂,且蛇形机械臂远离智能控制主体机箱的一侧设置有树枝剪切机构。
4、优选的,所述智能控制主体机箱是由电源系统、无人机飞控系统、智能感知系统、香榧果识别定位模块、碰撞检测模块、压力传感器模块和蛇形机械臂执行模块集合而成;
5、香榧果识别定位模块搭载rgb-d传感器及gps,用于分析摄像头组采摘收集的图像;
6、碰撞检测模块安装于无人机机身四周,智能感知系统用于检测碰撞检测模块传输的信号;
7、蛇形机械臂执行模块用于控制蛇形机械臂和树枝剪切机构动作;
8、无人机飞控系统用于控制无人机的飞行;
9、压力传感器模块用于检测到香榧果存储箱内收集的果实重量达到预设的重量阈值时,会触发相应的控制程序;
10、香榧果识别定位模块、碰撞检测模块、智能感知系统、蛇形机械臂执行模块和无人机飞控系统均与内部电源系统电源连接。
11、优选的,所述蛇形机械臂包括蛇形机械臂关节、关节连接孔和圆盘结构,所述蛇形机械臂由多个蛇形机械臂关节组合而成,且蛇形机械臂关节首尾处均开设有关节连接孔,多个所述蛇形机械臂关节通过关节连接孔和转动轴转动连接,且尾部转动轴与首部关节连接孔之间呈同心轴连接,且每个蛇形机械臂关节内均设置有伺服电机,伺服电机输出端固定连接有转动轴,所述蛇形机械臂关节远离智慧控制主体机箱的一侧设置有伺服电机,伺服电机的输出端固定连接有圆盘结构,且圆盘结构上设置有树枝剪切机构。
12、优选的,所述树枝剪切机构是由旋转电机和剪刀刀头组合而成,所述圆盘结构上同轴转动连接有剪刀刀头,且圆盘结构上固定连接有固定刀片,固定刀片与剪刀刀头之间位置相互配合,所述圆盘结构上设置有旋转电机,旋转电机与剪刀刀头的转轴同轴相连。
13、优选的,所述摄像头组由两个摄像头组合而成,且摄像头分别固定连接有在无人机主体和圆盘结构上侧,且摄像头采集端处环形设置有多个白光灯。
14、优选的,所述无人机螺旋桨包括无刷电机和螺旋桨叶片,所述螺旋桨支撑杆上侧设置有无刷电机,无刷电机的输出端固定连接有螺旋桨叶片。
15、优选的,所述香榧果存储箱由存储箱箱体、存储箱滑道组成,所述存储箱箱体外壁设置有存储箱滑道,且存储箱箱体开设有凹槽,且存储箱滑道与凹槽之间相互配合。
16、与现有技术相比,本发明的有益效果是:
17、1、当需要进行树枝剪切时,系统通过智能感知系统确定剪切位置,并计算出各个关节的旋转角度,蛇形机械臂执行模块发送指令给各个伺服电机,使它们按照预先设定的角度旋转,从而使整个蛇形机械臂达到所需的形态,圆盘结构随着伺服电机的旋转,将树枝剪切机构移动到需要剪切的位置,树枝剪切机构经过调节后,执行剪切动作,完成对树枝的剪切,剪切完成后,系统可以继续控制蛇形机械臂的伺服电机使其恢复到初始状态,准备进行下一次的操作。
18、2、旋转电机位于圆盘结构上,与剪刀刀头的转轴同轴相连,当系统发送指令给旋转电机时,剪刀刀头也跟随旋转,实现对树枝的剪切操作,圆盘结构上固定连接有固定刀片,这些刀片与剪刀刀头位置相互配合,在剪刀刀头旋转的过程中,固定刀片起到固定树枝的作用,确保树枝被准确地剪切而不会出现偏移或错位,当旋转电机带动剪刀刀头旋转到合适位置后,树枝就会被夹持在固定刀片和剪刀刀头之间,然后剪刀刀头的设计会确保树枝在正确的位置被剪断,树枝剪切机构能够准确、高效地完成树枝的剪切任务,提高了整个系统的采摘效率和精度。
19、3、无人机利用智能感知系统规避障碍,飞至指定位置,摄像头开始运作,采集图像并实时传输至香榧果识别定位模块,香榧果识别定位模块分析图像数据,判断是否为香榧果,并将位置信号传送至飞控系统,引导无人机移动至合适的剪切位置,蛇形机械臂开始工作,摄像头采集树枝剪切机构的位置信息,传输至执行模块,驱动机械臂使树枝剪切机构移动到需要剪切的位置,树枝剪切机构调节剪刀刀头角度,并执行剪切动作,将香榧果收集并存入存储箱,压力传感器模块实时监测果实重量,达到预设阈值时,gps发送信息,无人机自动返回回收地点,使得香榧果采摘机器人能够高效自动地进行采摘和收集工作,提高了生产效率和准确性,同时也考虑到了回收和再利用的环节,实现了自动化的香榧果采摘系统。
本文地址:https://www.jishuxx.com/zhuanli/20240614/104125.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表