一种轨道式莲蓬采摘机器人
- 国知局
- 2024-07-12 13:18:42
本发明涉及一种农业采摘机械,尤其涉及一种轨道式莲蓬采摘机器人。
背景技术:
1、莲蓬采摘是莲蓬农业生产中的重要环节,传统的莲蓬采摘方式主要依靠人工操作,存在劳动强度大、效率低下、成本高等问题。为了解决这些问题,近年来提出了一些莲蓬半自动化、自动化的采摘机构。然而,这些采摘机构在实际应用中仍然存在一些不足,难以适应自动化莲蓬采摘的完整需求。首先,采摘机构的操作范围受限;其次末端执行器难以灵活适应不同形状和大小的莲蓬;最后,采摘机器人在移动过程中容易受到地形和环境的影响,导致采摘效率低下。因此,目前亟需一种新型的移动平台式莲蓬采摘机器人,能够满足目前自动化莲蓬采摘的完整需求,提高采摘效率和地形自适应性。
技术实现思路
1、本发明的目的是克服上述背景技术的不足,提供一种轨道式莲蓬采摘机器人,该机器人应能适应不同形状的莲蓬采摘,地形适应性好,并且具有工作效率高的特点。
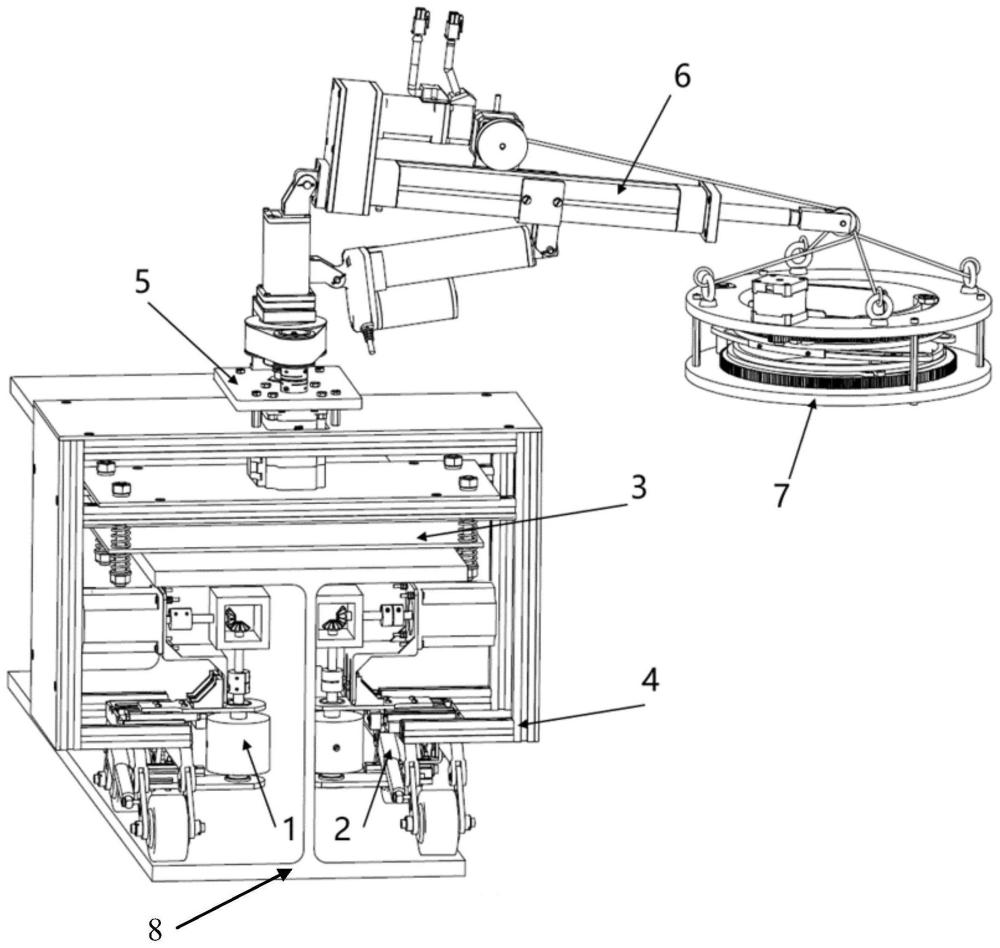
2、本发明提供的技术方案是:一种轨道式莲蓬采摘机器人,其特征在于:该采摘机器人包括框架、通过回转底座安装在框架顶部且携带末端执行器的机械臂、安装在框架上部的减震机构、左右对称布置在框架中下部且分别由驱动机构与调节机构组成的两个装配体;
3、驱动机构安装在调节机构的两个气动滑台上;所述驱动机构包括由一对锥齿轮且由步进电机驱动的换向器以及由所述换向器驱动且竖直安装的摩擦轮;
4、所述调节机构包括相互平行且通过滑台连接台连接的两个轮架支架,所述滑台连接台上安装有上气动滑台;所述两个轮架支架的左右两侧分别铰接着安装有从动轮的脚轮连接板),并且安装有控制脚轮连接板摆动角度用的电动推杆,两个轮架支架下侧还通过连接件与c型支架安装着下气动滑台;
5、所述减震机构包括相互平行且通过若干螺柱轴上下布置且连接框架的上面板与接触板,所述螺柱轴上套设有上支撑弹簧与下支撑弹簧;
6、所述回转底座包括安装在机械臂连接板上的底座、安装在底座上的同步轮驱动轴和同步轮从动轴、通过所述同步轮驱动轴驱动免键小同步轮的步进电机以及通过同步带与免键小同步轮进行动力传递的免键大同步轮;
7、所述机械臂包括安装在机械臂底座上的立臂、与所述立臂铰接的伺服电缸,安装在所述伺服电缸的伸出杆上用于吊绳移动的滑轮、设置在所述立臂与伺服电缸伸出支座之间的电动推杆、安装在伺服电缸侧面的步进电机以及安装在步进电机输出轴上用于缠绕所述吊绳的卷绕轮盘。
8、所述框架包括若干型材组成的矩形框、竖直布置在矩形框左右两侧的左面板和右面板以及水平安装在两个面板顶部的机械臂连接板;两根横梁相互平行且水平固定在框架的上部,框架底端的左右两侧分别水平固定着悬架,两侧悬架的一端与框架固定,另一端则相互往对方悬伸。
9、所述两个轮架支架包括轮架外侧支架和轮架内侧支架。
10、所述驱动轴的中部安装有所述的摩擦轮;所述驱动轴的上部与下部分别可转动地定位在水平布置的上支架与下支架上;上支架与下支架还分别与上气动滑台以及下气动滑台固定连接。
11、所述驱动机构与调节机构上下连接后形成一驱动链,两个驱动链左右对称地安装在所述框架两侧的悬架上,并且分别位于h型轨道中立板两侧的上下翼板之间;每一侧的悬架通过螺栓与所述两个轮架支架固定连接并且悬架轴线与轮架支架的长度方向垂直。
12、进一步地,两个电动推杆的头部分别铰接在所述轮架外侧支架以及轮架内侧支架上,两个电动推杆的尾部分别横向贯穿有销轴,两个销轴一一穿插在左右两侧的脚板连接件的滑槽后再用开口销固定。
13、进一步地,所述末端执行器包括圆环形、同轴布置并且分别安装有步进电机的两个底座,所述两个底座内环上的筒状座环相向布置,两个座环上分别安装着与主动小齿轮啮合的从动大齿轮,两个主动小齿轮分别与穿过底座端面的步进电机输出轴连接;带有刀片的两个月牙型刀片支架安装在两个底座之间,并且一端可转动地定位在支架旋转轴上;两个阶梯轴平行于两个底座的轴线布置并且分别可滑动地嵌入在两个底座的月牙型轨道中,两个阶梯轴上分别穿套着可与从动大齿轮啮合的齿轮连接件,两个阶梯轴底端则分别连接有与所述月牙型刀片支架中弧形轨道滑动配合的滑块,从而在工作时驱动所述两个月牙型刀片支架相向转动。
14、进一步地,所述支架旋转轴平行于两个底座的轴线布置并且上下两端分别固定在两个底座上。
15、进一步地,所述上底座外侧安装有若干连接吊绳用的吊环。
16、进一步地,所述月牙型刀片支架外侧安装有防漏圈。
17、本发明的有益效果是:
18、本发明通过设计“垂钓”式末端执行器,调整线的收放和俯仰角度精确定位末端执行器的位置,能够实现莲蓬果实的精准定位,提高采摘效率;同时,“垂钓”式莲蓬采摘末端执行器可以适应不同高度与位置以及不同形状与大小的莲蓬;此外,使用“垂钓”式设计简单方便,无需复杂的机械结构和控制系统;最后,从上而下式穿越莲蓬果实,进而切割莲蓬茎秆的这种采摘方式可以减少对莲蓬的损伤。
19、鉴于未来标准化农田建设是大势所趋,基于标准化农田的轨道式农业机器人也将是热点应用,同时基于莲蓬恶劣的生长环境,本发明提供轨道式莲蓬采摘机器人,能够为提高莲蓬采摘效率和降低劳动强度提供一种解决方案,同时具有良好的市场应用前景。
技术特征:1.一种轨道式莲蓬采摘机器人,其特征在于:该采摘机器人包括框架(4)、通过回转底座(5)安装在框架顶部且携带末端执行器(7)的机械臂(6)、安装在框架上部的减震机构(3)、左右对称布置在框架中下部且分别由驱动机构(1)与调节机构(2)组成的两个装配体;
2.根据权利要求1所述的轨道式莲蓬采摘机器人,其特征在于:所述框架(4)包括若干型材组成的矩形框、竖直布置在矩形框左右两侧的左面板(401)和右面板(402)以及水平安装在两个面板顶部的机械臂连接板(404);两根横梁(405)相互平行且水平固定在框架的上部,框架底端的左右两侧分别水平固定着悬架(403),两侧悬架的一端与框架固定,另一端则相互往对方悬伸。
3.根据权利要求2所述的轨道式莲蓬采摘机器人,其特征在于:所述两个轮架支架包括轮架外侧支架(202)和轮架内侧支架(203)。
4.根据权利要求3所述的轨道式莲蓬采摘机器人,其特征在于:所述驱动轴的中部安装有所述的摩擦轮(105);所述驱动轴的上部与下部分别可转动地定位在水平布置的上支架(103)与下支架(104)上;上支架与下支架还分别与上气动滑台以及下气动滑台固定连接。
5.根据权利要求4所述的轨道式莲蓬采摘机器人,其特征在于:所述驱动机构与调节机构上下连接后形成一驱动链,两个驱动链左右对称地安装在所述框架两侧的悬架上,并且分别位于h型轨道中立板两侧的上下翼板之间;每一侧的悬架通过螺栓与所述两个轮架支架固定连接并且悬架轴线与轮架支架的长度方向垂直。
6.根据权利要求5所述的轨道式莲蓬采摘机器人,其特征在于:两个所述电动推杆的头部分别铰接在所述轮架外侧支架以及轮架内侧支架上,两个电动推杆的尾部分别横向贯穿有销轴(209),两个销轴一一穿插在左右两侧的脚板连接件的滑槽后再用开口销固定。
7.根据权利要求6所述的轨道式莲蓬采摘机器人,其特征在于:所述末端执行器包括圆环形、同轴布置并且分别安装有步进电机的两个底座,所述两个底座内环上的筒状座环相向布置,两个座环上分别安装着与主动小齿轮(709)啮合的从动大齿轮(708),两个主动小齿轮分别与穿过底座端面的步进电机输出轴连接;带有刀片(710)的两个月牙型刀片支架(711)安装在两个底座之间,并且一端可转动地定位在支架旋转轴(707)上;两个阶梯轴(702)平行于两个底座的轴线布置并且分别可滑动地嵌入在两个底座的月牙型轨道中,两个阶梯轴上分别穿套着可与从动大齿轮啮合的齿轮连接件(703),两个阶梯轴底端则分别连接有与所述月牙型刀片支架中弧形轨道滑动配合的滑块(704),从而在工作时驱动所述两个月牙型刀片支架相向转动。
8.根据权利要求7所述的轨道式莲蓬采摘机器人,其特征在于:所述支架旋转轴平行于两个底座的轴线布置并且上下两端分别固定在两个底座上。
9.根据权利要求8所述的轨道式莲蓬采摘机器人,其特征在于:所述上底座外侧安装有若干连接吊绳用的吊环。
10.根据权利要求9所述的轨道式莲蓬采摘机器人,其特征在于:所述月牙型刀片支架(707)外侧安装有防漏圈(705)。
技术总结本发明涉及一种农业采摘机械,目的是提供一种轨道式莲蓬采摘机器人,该机器人应能适应不同形状的莲蓬采摘,地形适应性好,并且具有工作效率高的特点。技术方案是一种轨道式莲蓬采摘机器人,其特征在于:该采摘机器人包括框架、通过回转底座安装在框架顶部且携带末端执行器的机械臂、安装在框架上部的减震机构、左右对称布置在框架中下部且分别由驱动机构与调节机构组成的两个装配体。技术研发人员:严昊,张雷,姚岚,叶秉良受保护的技术使用者:浙江理工大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/104373.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表