一种基于无线通信的下肢外骨骼控制系统及方法
- 国知局
- 2024-07-12 10:38:01
本发明涉及下肢外骨骼感知和控制,具体为一种基于无线通信的下肢外骨骼控制系统,更涉及一种基于无线通信的下肢外骨骼控制方法。
背景技术:
1、随着社会老龄化的到来,人们迫切需要可用于辅助老年人行走的智能可穿戴设备。因此应运而生的下肢外骨骼机器人是一种增强下肢运动能力的助力装置,其通过人体运动行为/运动意识,控制其本体达到预期的关节角度/角速度、末端执行装置交互力/力矩,实现与人体协调运动的助力效果。
2、当前现有下肢外骨骼感知与控制模块均通过其本体集成的传感器、可支持机器学习的主控制器、驱动控制器实现感知和控制算法的部署。该方案大幅增加外骨骼本体重量,同时外骨骼主控制器算力具有一定的局限性,导致对算力要求较高的步态识别算法无法移至外骨骼本体、助力规划和控制实时性受限。同时可测量人体姿态的惯性传感器普遍使用有线或者无线蓝牙通信,有线通信存在布线费时、费力问题,且人体运动易导致线缆损坏;目前采用无线通信方案的下肢外骨骼传感稳定性差,存在易断连、传输速度慢等问题,无法满足外骨骼对步态识别算法的技术需求。
技术实现思路
1、根据现有外骨骼感知与控制技术存在的问题,本发明提出了一种基于无线通信的下肢外骨骼控制系统及方法,可以解决外骨骼感知线缆约束问题,减少外骨骼的集成复杂度,减轻外骨骼本体的重量;通过局域网实现惯性传感器到服务器、服务器到外骨骼的无线数据传输,可实现外骨骼的无线步态感知与助力控制。
2、为实现上述目的,本发明提供如下技术方案:
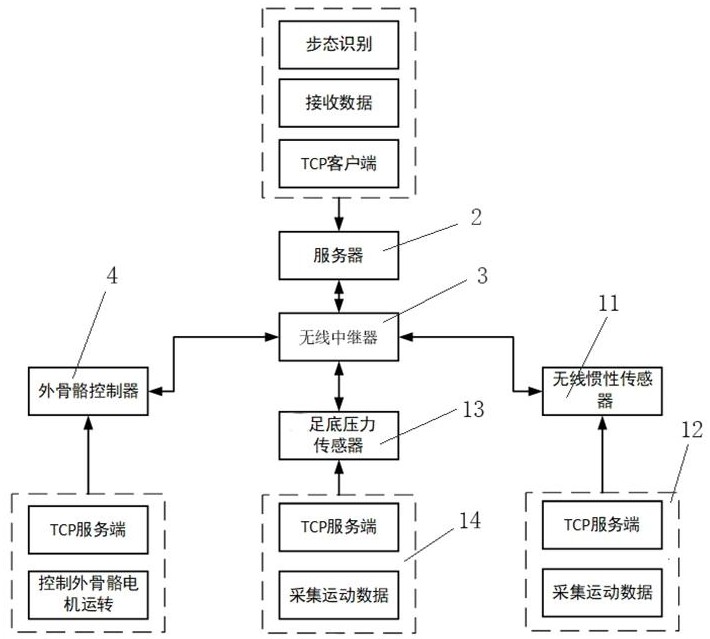
3、一种基于无线通信的下肢外骨骼控制系统,其控制系统包括:包括外骨骼感知模块、服务器、无线中继器以及外骨骼控制器,所述外骨骼感知模块通过无线中继器连接服务器,服务器通过无线中继器连接外骨骼控制器,
4、所述外骨骼感知模块用于将采集到的人体运动数据通过无线中继器发送到服务器,
5、所述服务器用于部署人体步态识别算法,接收来自外骨骼感知模块传来的数据作为算法的输入,再实时输出外骨骼感知模块的识别结果,并将结果转化为外骨骼控制信号通过无线中继器输出给外骨骼控制器。
6、进一步的,所述外骨骼感知模块由多个穿戴式无线惯性传感节点以及多个足底压力节点构成。
7、进一步的,所述无线惯性传感节点由无线惯性传感器和嵌入式第一微控制器组成,所述无线惯性传感器与嵌入式第一微控制器通过串口串联,所述无线惯性传感器用于测量物体运动的三轴加速度、三轴角速度、三轴磁力计。
8、进一步的,所述足底压力节点由足底压力传感器和嵌入式第二微控制器组成,所述足底压力传感器与嵌入式第二微控制器通过串口串联,所述足底压力传感器用于测量足底压力。
9、进一步的,所述无线中继器用于搭建局域网,用于无线惯性传感节点、足底压力节点、服务器以及外骨骼控制器之间的连接和数据传输。
10、进一步的,所述外骨骼控制器接收服务器发送的外骨骼控制信号,通过外骨骼控制信号规划助力曲线来控制电机驱动器驱动外骨骼电机运转。
11、一种基于无线通信的下肢外骨骼控制方法,该方法包括如下步骤:s1:将无线中继器、服务器、外骨骼控制器上电启动,并设置无线参数,完成初始化设置,开启无线中继器的无线功能,构建无线局域网络;
12、s2:通过编译程序,为每一个无线惯性传感节点和足底压力节点的配置嵌入式微控制器,启动无线惯性传感节点和足底压力节点对应的嵌入式第一微控制器和嵌入式第二微控制器,连接无线中继器,搭建tcp服务端,发送从惯性传感器和足底压力传感器采集到的数据;
13、s3:启动所述服务器上位记程序,等待无线惯性传感节点和足底压力节点与外骨骼控制器的连接;
14、s4:在所述外骨骼控制器中编写电机控制程序,电机控制程度通过接收服务器发送的外骨骼控制信号规划的助力曲线来控制外骨骼电机运动,该助力曲线取决于算法输出的姿态信息,不同的踝关节姿态对应不同的外骨骼控制信号。
15、进一步的,所述上位记程序的功能包括tcp/ip客户端的初始化设置、与服务端设备连接,无线惯性传感节点和足底压力节点数据的接收和输入服务器所部署的算法中,以及外骨骼控制信号的发送。
16、进一步的,所述助力曲线根据服务器实时算法以踝关节姿态,提取运动信息,解算出踝关节跖/背屈角度为依据,踝关节的实时跖/背屈角度与目标训练角度对比,根据比较结果,调整助力曲线比例系数,再输出助力曲线,达到控制外骨骼电机的目的。
17、进一步的,输出的所述助力曲线包括:未达到目标训练角度规划比例系数大于一的助力曲线,达到目标训练角度规划比例系数等于一的助力曲线,超过目标训练角度规划比例系数大于一的助力曲线。
18、与现有技术相比,本发明的有益效果是:
19、1、穿戴者在无线中继器搭建的局域网覆盖范围内的训练场所进行步态训练,该方法通过基于无线通信的下肢外骨骼控制系统实现,通过无线惯性传感节点以及足底压力节点对穿戴者的运动数据的采集,将采集得到的原始数据通过无线中继器传输给服务器,服务器实时的将发送来的数据输入在服务器上部署的步态识别算法,通过步态识别算法识别出的结果来给出对应的外骨骼控制信号,服务器将外骨骼控制信号发送给外骨骼控制器,外骨骼控制器规划控制外骨骼电机运动;
20、2、本发明可以有效减少外骨骼机器人的硬件系统复杂程度,方便机器人的结构设计,减轻了外骨骼机器人的重量,进而减少穿戴者的穿戴负担;通过无线传输的方式可以有效实现数据的可靠高速传输,降低外骨骼机器人的控制难度;远端部署的服务器性能相比适用于外骨骼的小体积算法部署模块具备更高的算力,在部署相同复杂度的算法时能够更快的得到结果,从而提高了外骨骼控制系统的鲁棒性。
技术特征:1.一种基于无线通信的下肢外骨骼控制系统,其特征在于:其控制系统包括:包括外骨骼感知模块、服务器、无线中继器以及外骨骼控制器,所述外骨骼感知模块通过无线中继器连接服务器,服务器通过无线中继器连接外骨骼控制器,
2.根据权利要求1所述的一种基于无线通信的下肢外骨骼控制系统,其特征在于:所述外骨骼感知模块由多个穿戴式无线惯性传感节点以及多个足底压力节点构成。
3.根据权利要求2所述的一种基于无线通信的下肢外骨骼控制系统,其特征在于:所述无线惯性传感节点由无线惯性传感器和嵌入式第一微控制器组成,所述无线惯性传感器与嵌入式第一微控制器通过串口串联,所述无线惯性传感器用于测量物体运动的三轴加速度、三轴角速度、三轴磁力计。
4.根据权利要求2所述的一种基于无线通信的下肢外骨骼控制系统,其特征在于:所述足底压力节点由足底压力传感器和嵌入式第二微控制器组成,所述足底压力传感器与嵌入式第二微控制器通过串口串联,所述足底压力传感器用于测量足底压力。
5.根据权利要求1所述的一种基于无线通信的下肢外骨骼控制系统,其特征在于:所述无线中继器用于搭建局域网,用于无线惯性传感节点、足底压力节点、服务器以及外骨骼控制器之间的连接和数据传输。
6.根据权利要求1所述的一种基于无线通信的下肢外骨骼控制系统,其特征在于:所述外骨骼控制器接收服务器发送的外骨骼控制信号,通过外骨骼控制信号规划助力曲线来控制电机驱动器驱动外骨骼电机运转。
7.一种基于无线通信的下肢外骨骼控制方法,其特征在于:该方法包括如下步骤:s1:将无线中继器、服务器、外骨骼控制器上电启动,并设置无线参数,完成初始化设置,开启无线中继器的无线功能,构建无线局域网络;
8.根据权利要求7所述的一种基于无线通信的下肢外骨骼控制方法,其特征在于:所述上位记程序的功能包括tcp/ip客户端的初始化设置、与服务端设备连接,无线惯性传感节点和足底压力节点数据的接收和输入服务器所部署的算法中,以及外骨骼控制信号的发送。
9.根据权利要求7所述的一种基于无线通信的下肢外骨骼控制方法,其特征在于:所述助力曲线根据服务器实时算法以踝关节姿态,提取运动信息,解算出踝关节跖/背屈角度为依据,踝关节的实时跖/背屈角度与目标训练角度对比,根据比较结果,调整助力曲线比例系数,再输出助力曲线,达到控制外骨骼电机的目的。
10.根据权利要求9所述的一种基于无线通信的下肢外骨骼控制方法,其特征在于:输出的所述助力曲线包括:未达到目标训练角度规划比例系数大于一的助力曲线,达到目标训练角度规划比例系数等于一的助力曲线,超过目标训练角度规划比例系数大于一的助力曲线。
技术总结本发明涉及一种基于无线通信的下肢外骨骼控制系统,其控制系统包括:包括外骨骼感知模块、服务器、无线中继器以及外骨骼控制器,外骨骼感知模块通过无线中继器连接服务器,服务器通过无线中继器连接外骨骼控制器,外骨骼感知模块用于将采集到的人体运动数据通过无线中继器发送到服务器,服务器用于部署人体步态识别算法,接收来自外骨骼感知模块传来的数据作为算法的输入,再实时输出外骨骼感知模块的识别结果,并将结果转化为外骨骼控制信号通过无线中继器输出给外骨骼控制器。远端部署的服务器性能相比适用于外骨骼的小体积算法部署模块具备更高的算力,在部署相同复杂度的算法时能够更快的得到结果,从而提高了外骨骼控制系统的鲁棒性。技术研发人员:王佳鑫,王宇龙,邓环宇,郭世杰受保护的技术使用者:河北工业大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/88179.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表