角膜曲率与屈光度测量方法、系统、设备及介质与流程
- 国知局
- 2024-07-12 10:40:47
本发明涉及医疗设备领域,特别涉及一种角膜曲率与屈光度测量方法、系统、设备及介质。
背景技术:
1、对于眼科检查,验光仪是重要的辅助检测医疗手段。验光仪可以用来检测人眼的屈光度,主要是过固视灯发射测量光源,穿过眼角膜、晶状体、房水、视网膜等眼球器官,最后投射到眼球视网膜,再反射回仪器的相应光学系统中,然后由ccd接收,将光信号转换成电信号,进而完成屈光度测量。
2、但现有的电脑验光仪仅能检测中心凹视网膜的屈光度,检测项目比较单一,导致眼科检查不够全面。
技术实现思路
1、因此,本发明所要解决的技术问题是如何准确地同时测量出角膜曲率和屈光度,提高眼科检查的全面性和可靠性。
2、为解决上述技术问题,本发明提供一种角膜曲率与屈光度测量方法,所述方法包括:
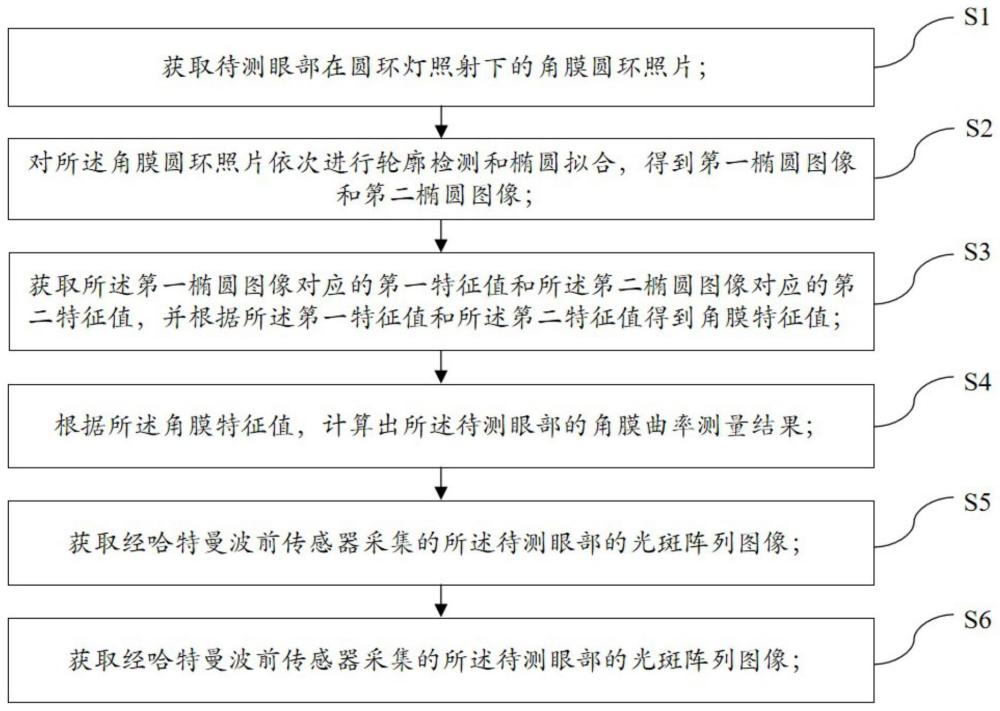
3、获取待测眼部在圆环灯照射下的角膜圆环照片;
4、对所述角膜圆环照片依次进行轮廓检测和椭圆拟合,得到第一椭圆图像和第二椭圆图像;
5、获取所述第一椭圆图像对应的第一特征值和所述第二椭圆图像对应的第二特征值,并根据所述第一特征值和所述第二特征值得到角膜特征值;
6、根据所述角膜特征值,计算出所述待测眼部的角膜曲率测量结果;
7、获取经哈特曼波前传感器采集的所述待测眼部的光斑阵列图像;
8、根据所述光斑阵列图像进行波前重构,得到所述待测眼部的屈光度测量结果。
9、可选地,所述第一特征值包括所述第一椭圆图像对应的第一长轴长度、第一短轴长度和第一角度,所述第二特征值包括所述第二椭圆图像对应的第二长轴长度、第二短轴长度和第二角度;
10、其中,所述第一角度指所述第一椭圆图像中椭圆的长轴与水平方向之间的夹角,所述第二角度指所述第二椭圆图像中椭圆的长轴与水平方向之间的夹角。
11、可选地,所述角膜特征值包括所述第一长轴长度与所述第二长轴长度之间的平均长轴长度、所述第一短轴长度与所述第二短轴长度之间的平均短轴长度以及所述第一角度与所述第二角度之间的平均角度。
12、可选地,所述角膜曲率测量结果包括所述待测眼部的第一角膜曲率半径、第二角膜曲率半径和角膜轴位;
13、所述根据所述角膜特征值,计算出所述待测眼部的角膜曲率测量结果,包括:
14、将所述平均角度确定为所述角膜轴位;
15、根据相机成像公式,将所述平均长轴长度转换为实际长轴长度,并将所述平均短轴长度转换为实际短轴长度;
16、根据角膜成像公式,根据所述实际长轴长度计算出第一角膜焦距,并根据所述实际短轴长度计算出第二角膜焦距;
17、基于折射公式,根据所述第一角膜焦距计算得到所述待测眼部的所述第一角膜曲率半径,根据所述第二角膜焦距计算得到所述待测眼部的所述第二角膜曲率半径;
18、所述折射公式具体为:
19、r1=(n-1)×f1,r2=(n-1)×f2;
20、其中,r1和r2分别为所述第一角膜曲率半径和所述第二角膜曲率半径,n为角膜近似折射率,f1和f2分别为所述第一角膜焦距和所述第二角膜焦距。
21、可选地,所述相机成像公式具体为:
22、
23、其中,l1和l2分别为所述实际长轴长度和所述实际短轴长度,z为设备预设工作距离,f0为角膜相机焦距,p1和p2分别为所述平均长轴长度和所述平均长轴长度;
24、和/或,所述角膜成像公式具体为:
25、
26、
27、
28、其中,分别为长轴所对应的长轴像距和短轴所对应的短轴像距,q为所述待测眼部与所述圆环灯之间的物距,r为所述圆环灯的半径。
29、可选地,在对所述角膜圆环照片依次进行轮廓检测和椭圆拟合之前,所述方法还包括:
30、依次对所述角膜圆环照片进行高斯滤波处理、灰度直方图处理和二值化处理。
31、可选地,所述根据所述光斑阵列图像进行波前重构,得到所述待测眼部的屈光度测量结果,包括:
32、根据所述光斑阵列图像得到波前像差信息;
33、利用泽尼克多项式,根据所述波前像差信息进行波前重构,得到屈光度测量结果。
34、此外,本发明还提出一种角膜曲率与屈光度测量系统,应用于前述的角膜曲率与屈光度测量方法中,所述系统包括:
35、第一图像获取模块,用于获取待测眼部在圆环灯照射下的角膜圆环照片;
36、图像拟合模块,用于对所述角膜圆环照片依次进行轮廓检测和椭圆拟合,得到第一椭圆图像和第二椭圆图像;
37、特征获取模块,用于获取所述第一椭圆图像对应的第一特征值和所述第二椭圆图像对应的第二特征值,并根据所述第一特征值和所述第二特征值得到角膜特征值;
38、角膜曲率计算模块,用于根据所述角膜特征值,计算出所述待测眼部的角膜曲率测量结果;
39、第二图像获取模块,用于获取经哈特曼波前传感器采集的所述待测眼部的光斑阵列图像;
40、屈光度计算模块,用于根据所述光斑阵列图像进行波前重构,得到所述待测眼部的屈光度测量结果。
41、此外,本发明还提出一种眼科检查设备,所述设备包括:
42、设备本体;
43、圆环灯,设于所述设备本体上,用于向待测眼部发出圆环光;
44、图像传感器,设于所述设备本体上,用于采集所述待测眼部在所述圆环灯照射下的角膜圆环照片;
45、哈特曼波前传感器,设于所述设备本体上,用于采集所述待测眼部的光斑阵列图像;以及
46、前述的角膜曲率与屈光度测量系统,设于所述设备本体上,与所述图像传感器和所述哈特曼波前传感器均通信连接,用于:
47、获取待测眼部在圆环灯照射下的角膜圆环照片;
48、对所述角膜圆环照片依次进行轮廓检测和椭圆拟合,得到第一椭圆图像和第二椭圆图像;
49、获取所述第一椭圆图像对应的第一特征值和所述第二椭圆图像对应的第二特征值,并根据所述第一特征值和所述第二特征值得到角膜特征值;
50、根据所述角膜特征值,计算出所述待测眼部的角膜曲率测量结果;
51、获取经哈特曼波前传感器采集的所述待测眼部的光斑阵列图像;
52、根据所述光斑阵列图像进行波前重构,得到所述待测眼部的屈光度测量结果。
53、此外,本发明还提出一种计算机存储介质,所述计算机存储介质包括:至少一个指令,在所述指令被执行时实现前述的角膜曲率与屈光度测量方法的方法步骤。
54、本发明提供的角膜曲率与屈光度测量方法、系统、设备及介质中,获取待测眼部在圆环灯照射下的角膜圆环照片,该角膜圆环照片中包含圆环灯在角膜上所成的上下两半部分的圆环像;通过轮廓检测和椭圆拟合,可以基于上下两部分的圆环像拟合出两个完整的椭圆图像,即第一椭圆图像和第二椭圆图像;基于图像知识和数学几何知识,根据该两个椭圆图像可以分别获取对应的椭圆特征,即第一特征值和第二特征值,进一步得到更接近真实角膜的特征,即角膜特征值;最后基于成像相关知识,根据角膜特征值即可计算出准确的角膜曲率测量结果;同时,获取经哈特曼波前传感器所采集的光斑阵列图像,基于该光斑阵列图像可准确实现波前复原,进而通过波前重构得到准确的屈光度测量结果;
55、本发明的角膜曲率与屈光度测量方法、系统、设备及介质,能同时准确地测量出角膜曲率和屈光度,眼科检查更加全面,可靠性更高。
本文地址:https://www.jishuxx.com/zhuanli/20240614/88480.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表