一种石榴花萼去除机的制作方法
- 国知局
- 2024-07-12 12:23:09
本技术涉及果蔬采后深加工,特别涉及一种石榴花萼去除机。
背景技术:
1、石榴作为一种药食同源的果品深受消费者的喜爱,石榴从结构方面主要包括石榴皮、石榴籽和花萼,其中石榴皮可以作为中药可以进行内外服用,而占据石榴的主体部分,石榴籽可以直接食用或者经过深加工做成果汁引用,当小规模的使用时一般采用人工去皮取籽的方法。效率低下,在批量处理和规模化采购深加工时需要采用机械去除的方法提高去皮取籽效率,而在取籽的工艺中第一步是去除石榴花萼部分,才能为后续取籽工艺提供有力支撑,国内外对石榴去皮取籽过程进行一定的研究取得了阶段性成果,但在石榴去皮取籽过程的第一道工序-去除花萼部分还存在一些技术问题需要亟待解决,主要问题在于工作效率和工作效果方面,本实用新型不同于目前现有的石榴去皮取籽工艺中采用的原理和工艺方法,充分分析了去除石榴花萼的工序、动作和工艺,结合机械和自动控制技术,充分利用气动技术,步进和伺服电机控制技术,能够有效解决利用机械替代人工去除花萼的技术问题。
技术实现思路
1、本实用新型的目的在于提供一种石榴花萼去除机,以机电自动化技术解决石榴花萼去除工艺的自动化处理过程。
2、为实现上述目的本实用新型公开了如下的技术方案
3、一种石榴花萼去除机,其特征在于,主要部件包括伺服转盘组件、去萼步进丝杆电机组件、同步轮输送带、收集仓包括去萼后的石榴和花萼;
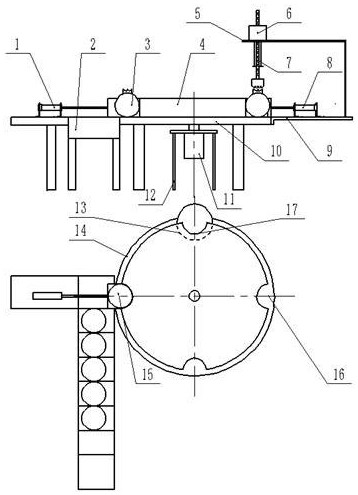
4、所述的伺服转盘组件包括伺服电机11、电机支架12、分度转盘4、转盘支撑10、转盘护板14;分度转盘4在转盘支撑10的正上方,伺服电机11输出轴与转盘相连,转盘护板14连接在转盘支撑10上;
5、所述的去萼步进丝杆电机组件包括:去萼丝杆电机总成6、去萼丝杆电机与机架5通过螺栓连接,丝杆前端装有圆柱状去萼刀,萼片剔除柱7安装在机架上并与丝杆同轴,去萼限位气缸8与气缸支架9 通过螺栓连接,气缸支架9在转盘支撑10右侧通过螺栓连接,进料限位气缸1在同步轮输送带2左侧通过螺栓连接在机架上,气缸活塞杆前端装有仿形推块,其主要作用是推送石榴并保证石榴顺利进入转盘上石榴进料工位;
6、所述的同步轮输送带放置于伺服转盘组件的左侧,输送带上具有盛装石榴的分格槽,其出口与石榴进料口15连接,以确保石榴能正确进入到分度转盘4的石榴进料口15;输送带采用同步轮输送带目的是便于准确控制电机运动位置的精确性和减少普通皮带传动的张紧机构;
7、所述的收集仓包括收集仓18,可正反转的转动料斗19通过焊接方法连接在步进驱动总成20上,其目的是通过步进电机控制总成的正反旋转90度实现去萼后的石榴和花萼分别进入收集仓的右侧和左侧分隔仓,步进驱动总成20主要有步进电机和输出轴轴套组成,转动料斗19焊接在输出轴轴套上,滑板21通过螺栓连接在收集仓18的侧壁上,滑板因有45°倾斜角度能够缓冲石榴和花萼垂直降落速度,使得花萼和石榴顺利进入收集仓。
8、本实用新型进一步公开了石榴花萼去除机的使用方法,其内容如下:
9、同步轮输送带2上的石榴有序排列在输送带的分格槽上,花萼朝上,分格槽立板和输送带作用下沿输送带运动方向前行,当控制系统检测到有第一个石榴到达分度转盘4的石榴进口时,输送带停止运动,进料气缸活塞杆伸出,其前端仿形推块将石榴推入分度转盘的石榴进料口15中,在伺服电机11的驱动下在转盘支撑10的上方做逆时针旋转180°到达去除萼片剔除工位16,此时分度转盘停止运动,石榴去萼限位气缸8的活塞杆伸出,因前端有石榴限位块,使得石榴被夹持在去除萼片剔除工位16,此时正上方的去萼丝杆电机组总成6的丝杆在步进电机的驱动下,带动下端带齿的圆柱状去萼刀,做向下的直线运动和旋转运动,去萼刀接触到石榴萼片时在步进电机的控制下旋入石榴一定深度,萼片在切割力和旋转力的共同作用下挤入去萼刀中间中空部分,此时步进电机进行反转,带动已切取萼片的去萼刀向上运动;同时分度继续逆时针转盘旋转90°将去除萼片的石榴带入去萼后的石榴收集工位17,在支撑盘上有一圆孔,石榴由此圆孔落入石榴收集仓18,由于工艺节拍的配合,去萼后的石榴落入收集仓中的转动料斗19里,在步进电机的驱动下顺时针转动,将石榴倒入右侧仓的滑板上,石榴滑入右侧仓底部,完成石榴收集工作;此时去萼步进电机进行反转,带动已切取萼片的去萼刀向上运动,当萼片剔除柱与萼片接触时,由于萼片在去萼刀的带动下是向上运动的,因此萼片剔除柱将萼片推出,落在萼片去除工位16处,分度转盘再逆时针旋转90°将去除的萼片带入处理后的石榴和萼片收集工位17的圆孔处,由此处石榴收集仓的转动料斗里,在步进电机的驱动下逆时针转动,将萼片倒入左侧仓的滑板上,萼片滑入左侧仓底部,完成萼片收集工作;由此完成第一个石榴的去萼全部过程,之后分度转盘继续逆时针旋转90°,同步轮输送带启动将第二个石榴送入石榴进料口,重复第一个石榴的去萼工艺,如此往复循环,完成石榴的连续去除花萼工作过程。
10、本实用新型更加详细的描述:
11、本实用新型提供一种石榴花萼去除机,主要零部件包括伺服转盘组件、去萼步进丝杆电机组件和同步轮输送带,收集仓(分别收集去萼后的石榴和花萼)。
12、进一步的,所述伺服转盘组件包括:伺服电机11、伺服电机支架12、分度转盘4、转盘支撑10和转盘护板14,所述分度转盘4在转盘支撑10的正上方,伺服电机11输出轴与转盘相连;转盘护板14连接在转盘支撑10上;所述去萼步进丝杆电机组件包括:去萼丝杆电机总成6、去萼丝杆电机与机架5通过螺栓连接,丝杆前端装有圆柱状去萼刀,萼片剔除柱7安装在机架上并与丝杆同轴;所述去萼限位气缸8与气缸支架9 通过螺栓连接,所述气缸支架9在转盘支撑10右侧通过螺栓连接。
13、所述进料限位气缸1在同步轮输送带2左侧通过螺栓连接在机架上,气缸活塞杆前端装有仿形推块,其主要作用是推送石榴并保证石榴顺利进入转盘上石榴进料工位。同步轮输送带放置于伺服转盘组件的左侧,输送带上具有盛装石榴的分格槽,其出口与石榴进料口15连接,以确保石榴能正确进入到分度转盘4的石榴进料口15;所述同步轮输送带放置于伺服转盘组件的左侧,其出口与石榴进料口15连接,以确保石榴能正确进入到分度转盘4的石榴进料口15。进一步的,输送带采用同步轮输送带目的是便于准确控制电机运动位置的精确性和减少普通皮带传动的张紧机构;收集仓包括:收集仓18,可正反转的转动料斗19通过焊接方法连接在步进驱动总成20上,其目的是通过步进电机控制总成的正反旋转90度实现去萼后的石榴和花萼分别进入收集仓的右侧和左侧分隔仓,步进驱动总成20主要有步进电机和输出轴轴套组成,转动料斗19焊接在输出轴轴套上,滑板21通过螺栓连接在收集仓18的侧壁上,滑板因有45°倾斜角度能够缓冲石榴和花萼垂直降落速度,使得花萼和石榴顺利进入收集仓。
14、本实用新型主要解决了石榴去皮取籽过程自动化去除花萼问题,重点考察了花萼去除过程通过机构实现输送、去除和分离和收集过程,主要的难点在于石榴花萼的去除、分离的实现过程。
15、本实用新型公开的石榴花萼去除机与现有技术相比所具有的有益效果在于:
16、(1)本实用新型提供的一种石榴花萼去除机,可通过控制系统的上位机触摸屏和下位机可编程控制器plc进行控制,通过控制同步轮输送带的运动速度和精确停止位置保证与后续工艺中的伺服转盘组件、去萼步进丝杆电机组件的工序协调配合,确保去萼整个工艺的顺利实施和工作效率,石榴花萼去除机由于采用了伺服电机驱动分度转盘在转速和位置精度控制上更具有可操作性,而去萼步进丝杆电机组件能够精确实现去萼深度,减少对石榴籽粒的损伤,综上所述结合伺服控制技术、步进电机控制技术和同步带传动技术能有效提高设备工作精度、可靠性和通用性。
17、(2)去除石榴花萼部分的效果可以有效去除石榴花萼部分,能够有效提高工作效率和做到去除花萼的效果一致性。
18、(3)对于后续工艺中取籽部分的有益效果因为采取了机械和自动控制技术可以有效去除石榴的花萼部分并且花萼和石榴进行了分离,在后续取籽工艺中降低了石榴皮部分的分离难度,可以提高石榴籽的获取率。
本文地址:https://www.jishuxx.com/zhuanli/20240614/98546.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表