泳池清洁机器人的制作方法
- 国知局
- 2024-07-10 18:04:11
本技术涉及清洁设备领域,尤其涉及一种泳池清洁机器人。
背景技术:
1、随着人们对健康的愈加重视,游泳作为一种非常好的健身锻炼方式受到了年轻人的追捧,为此越来越多的游泳池被建造了出来,但由于游泳池内的水储量比较大,若是经常对其进行更换所需成本太高,所以人们往往采用沉淀法对其进行杂质处理,这种方法使杂质形成沉淀积攒在游泳池底部,后续需要人工或者机器对游泳池底部沉淀进行清理,为此泳池清洁机器人被造就了出来,传统泳池清洁机器人大大节省了人工成本,其经过的地方碎屑沉淀被很好地清理干净,而且泳池清洁机器人可以在游泳池内进行持续性作业。
2、然而,现有的泳池清洁机器人仅仅具备有前后移动的功能,也即是说,泳池清洁机器人不具备有转向功能,如此,在泳池清洁机器人清洁泳池的情况下,泳池清洁机器人不能够通过转动来快速对池底进行清洁,如此大大增加了泳池清洁机器人的清洁时间,耗时较长,降低了用户的体验度,不利于用户使用泳池清洁机器人。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种泳池清洁机器人,以解决现有技术中的泳池清洁机器人存在不能转向的问题。
2、一种泳池清洁机器人,所述泳池清洁机器人包括:
3、机体;和
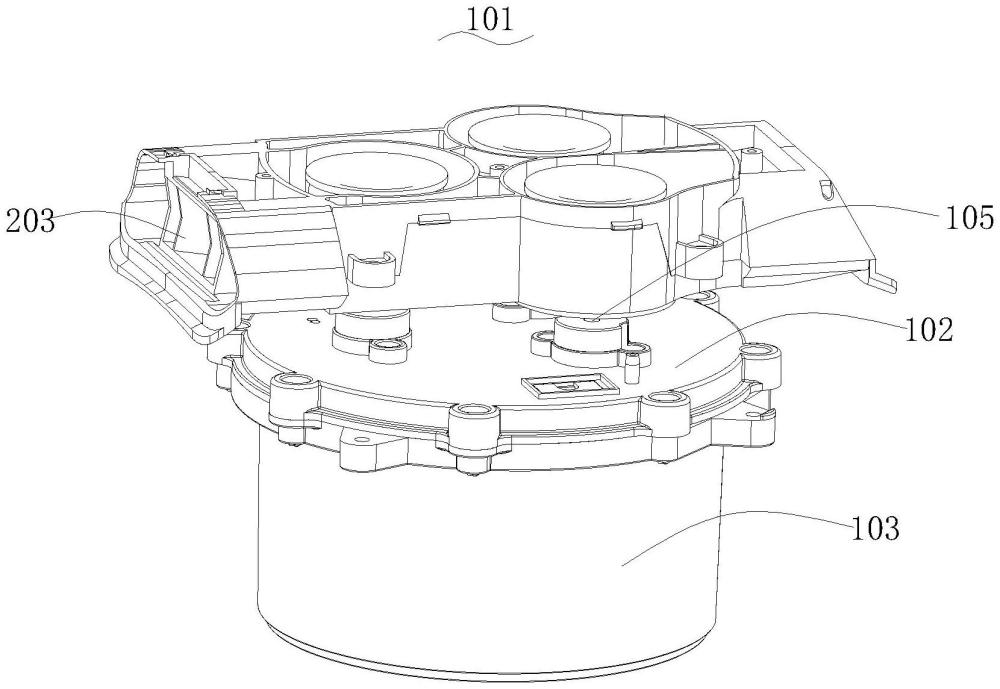
4、动力箱,所述动力箱安装于所述机体内,所述动力箱用于驱动所述机体移动,所述动力箱内设置有三个驱动电机;
5、流道,所述流道包括三个子流道,每个所述子流道内分别设置有一个叶轮,每个所述叶轮与一个所述驱动电机连接,所述驱动电机工作带动一个所述叶轮转动以使得对应的所述子流道内的水从每个所述子流道对应的排水口流出。
6、本实用新型的泳池清洁机器人,三个驱动电机分别对应驱动一个子流道内的叶轮转动,通过叶轮的转动将子流道内的水排出以通过水流的作用力来带动机体移动,也即是说,驱动电机工作带动一个叶轮转动以使得水流会被叶轮的桨叶甩进对应的子流道内,以使叶轮持续将泳池中的水从进水口抽出至对应的子流道,抽出的水流会使泳池清洁机器人的内部产生负压,以达到吸取垃圾的目的;同时叶轮抽出的水能够通过对应子流道的排水口喷出,对泳池清洁机器人产生一个反向的推力,在推力的作用下即可使泳池清洁机器人开始行走,通过设置三个驱动电机、三个叶轮以及三个子流道,在改变叶轮的转速的情况下,能够改变抽至子流道内的水量,从而使得从排水口出来的水量不同,进而导致反向的推力不同,以实现转向的效果,如此,本实用新型的泳池清洁机器人不仅能够直线移动也能够转向移动,以使得泳池清洁机器人能够在较短的时间内对池底进行全面的清洁,结构简单,易于实现。
7、进一步地,所述动力箱包括:
8、下壳体;
9、上壳体,所述下壳体内设置有容置空间,三个所述驱动电机安装于所述容置空间内,所述上壳体上设置有三个过孔,每个过孔对应一个所述驱动电机的电机轴设置,所述电机轴穿过所述过孔与对应的所述叶轮连接,所述电机轴与所述过孔活动密封。
10、进一步地,所述下壳体与所述上壳体可拆卸连接,所述下壳体的靠近所述上壳体的一侧设置有o型圈,所述上壳体和所述下壳体通过所述o型圈实现密封。
11、进一步地,所述泳池清洁机器人包括可充电式锂离子电池,所述可充电式锂离子电池可拆卸的安装于所述容置空间。
12、进一步地,所述泳池清洁机器人包括控制电路板,所述控制电路板可拆卸的安装于所述容置空间。
13、进一步地,所述机体上设置有手柄,所述手柄的表面设置有防滑结构。
14、进一步地,所述防滑结构包括橡胶或者是防滑凸起。
15、进一步地,所述机体远离所述手柄的一侧设置有移动轮,所述移动轮用于带动机体移动。
16、进一步地,所述移动轮的数量为4个,4个所述移动轮呈“十字”型排布。
17、进一步地,所述机体内设置有配重块,所述配重块可拆卸的安装于所述机体内。
技术特征:1.一种泳池清洁机器人,其特征在于,所述泳池清洁机器人包括:
2.如权利要求1所述的泳池清洁机器人,其特征在于,所述动力箱包括:
3.如权利要求2所述的泳池清洁机器人,其特征在于,所述下壳体与所述上壳体可拆卸连接,所述下壳体的靠近所述上壳体的一侧设置有o型圈,所述上壳体和所述下壳体通过所述o型圈实现密封。
4.如权利要求2所述的泳池清洁机器人,其特征在于,所述泳池清洁机器人包括可充电式锂离子电池,所述可充电式锂离子电池可拆卸的安装于所述容置空间。
5.如权利要求2所述的泳池清洁机器人,其特征在于,所述泳池清洁机器人包括控制电路板,所述控制电路板可拆卸的安装于所述容置空间。
6.如权利要求1所述的泳池清洁机器人,其特征在于,所述机体上设置有手柄,所述手柄的表面设置有防滑结构。
7.如权利要求6所述的泳池清洁机器人,其特征在于,所述防滑结构包括橡胶或者是防滑凸起。
8.如权利要求7所述的泳池清洁机器人,其特征在于,所述机体远离所述手柄的一侧设置有移动轮,所述移动轮用于带动机体移动。
9.如权利要求8所述的泳池清洁机器人,其特征在于,所述移动轮的数量为4个,4个所述移动轮呈“十字”型排布。
10.如权利要求1所述的泳池清洁机器人,其特征在于,所述机体内设置有配重块,所述配重块可拆卸的安装于所述机体内。
技术总结本技术公开了一种泳池清洁机器人。泳池清洁机器人包括机体、动力箱和流道,动力箱安装于机体内,动力箱用于驱动机体移动,动力箱内设置有三个驱动电机。流道包括三个子流道,每个子流道内分别设置有一个叶轮,每个叶轮与一个驱动电机连接,驱动电机工作带动一个叶轮转动以使得对应的子流道内的水从每个子流道对应的排水口流出。通过设置三个驱动电机、三个叶轮以及三个子流道,在改变叶轮的转速的情况下,能够改变抽至子流道内的水量,从而使得从排水口出来的水量不同,进而导致反向的推力不同,以实现转向的效果,以使得泳池清洁机器人能够在较短的时间内对池底进行全面的清洁,结构简单,易于实现。技术研发人员:张玲涛,钟宏东,赵传涛受保护的技术使用者:深圳市普森斯科技有限公司技术研发日:20231017技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240615/66126.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表