一种预制墙板支撑装置、方法及其存储介质与流程
- 国知局
- 2024-07-10 18:20:18
本申请涉及建筑施工的领域,尤其是涉及一种预制墙板支撑装置、方法及其存储介质。
背景技术:
1、在建筑施工过程中,浇筑形成墙面或柱体前,需要通过预制墙板围合形成浇筑腔,然后将混凝土浇筑入浇筑腔内以形成墙面或柱体,而预制墙板围合形成浇筑腔时,常通过支撑杆、支撑架、螺栓等支撑件来对预制墙板进行固定。
2、而固定后,若是预制墙板的角度并不垂直,即出现倾斜,此时若是继续浇筑,将会导致浇筑出来的墙面或柱体歪斜,使得建筑质量无法达标,故而需要拆除支撑件,对预制墙板调整后重新安装支撑件,操作繁琐。
技术实现思路
1、为了改善调整预制墙板角度的操作繁琐的问题,本申请提供一种预制墙板支撑装置、方法及其存储介质。
2、本申请提供的一种预制墙板支撑装置,采用如下的技术方案:
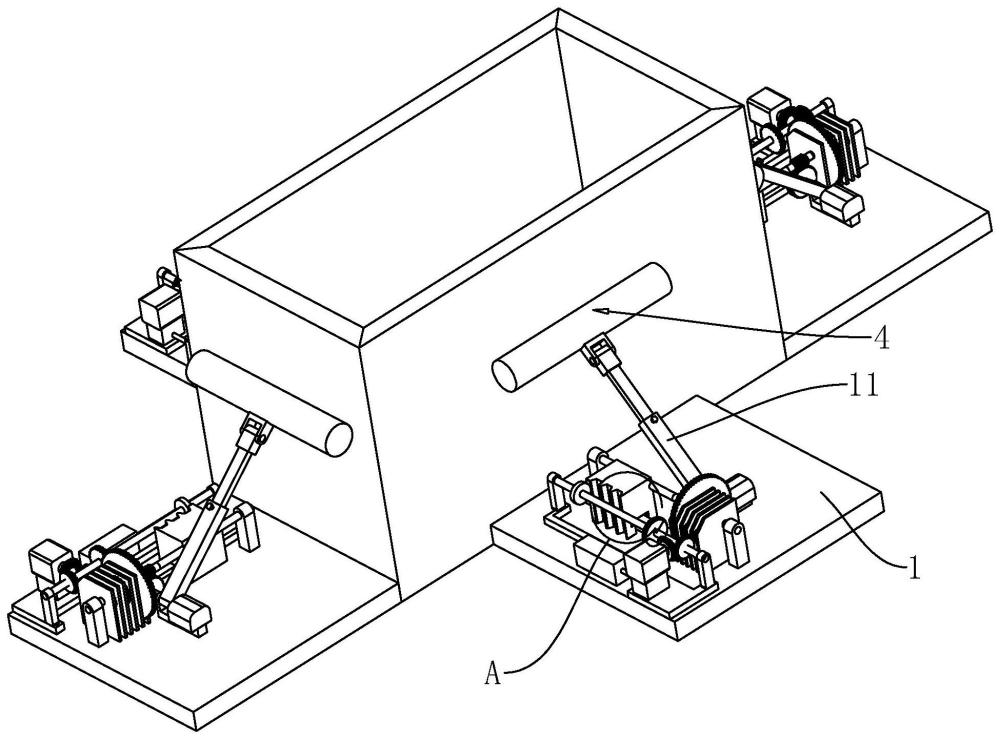
3、一种预制墙板支撑装置,包括底座,所述底座上转动设置有顶杆,所述底座与所述顶杆用于抵触在预制墙板上,所述顶杆转动轴上设置有蜗轮齿,所述底座上转动设置有用于所述蜗轮齿啮合转动的蜗轮杆,所述底座上设置有用于控制所述蜗轮杆转动的控制组件,所述底座上还设置有用于固定所述蜗轮杆状态的稳定组件。
4、通过采用上述技术方案,通过稳定组件对蜗轮杆进行转动限位,通过控制组件对蜗轮杆进行转动控制,从而控制顶杆的转动,控制对预制墙板的抵触,并调整预制墙板的角度,方便快捷,且可实时对预制墙板进行角度调节,角度调节完毕后无需拆卸,可直接起到支撑作用,方便快捷。
5、可选的,所述控制组件包括转动设置在所述底座上的控制杆,所述控制杆还滑动在所述底座上,所述控制杆上设置有控制齿轮,所述蜗轮杆上设置有多个直径不同的被动齿轮,所述底座上转动设置有多个换向齿轮,所述控制齿轮与尺寸最大的所述被动齿轮啮合,所述控制齿轮通过所述换向齿轮与其他所述被动齿轮啮合。
6、通过采用上述技术方案,通过控制杆滑动,来使控制齿轮啮合在不同的被动齿轮上,而通过换向齿轮填补了直径不同的被动齿轮的直径变化导致的与控制齿轮难以适配的问题,使得控制齿轮转动时,所带的被动齿轮不同,使得蜗轮杆的转速不同,使得顶杆在未接触到预制墙板时,可通过控制齿轮啮合在直径小的被动齿轮上,使控制杆相同的转速,带动蜗轮杆更快的转动,而当顶杆在接触到预制墙板时,可通过控制齿轮啮合在直径大的被动齿轮上,使控制杆相同的转速,带动蜗轮杆更慢的转动,使顶杆预制墙板的角度控制更加精准。
7、可选的,所述控制组件还包括转动驱动件以及滑动驱动件,所述转动驱动件转动轴连接在所述控制杆上以控制所述控制杆转动,所述滑动驱动件的输出轴连接在所述转动驱动件上以控制所述控制杆滑动。
8、通过采用上述技术方案,通过转动驱动件以及滑动驱动件实现了自动控制,方便快捷且精准。
9、可选的,所述控制齿轮的齿牙上开设有引导斜面,所述引导斜面用于与所述被动齿轮的齿牙抵触并引导所述控制齿轮转动啮合。
10、通过采用上述技术方案,通过引导斜面使得被动齿轮与控制齿轮更好的啮合,降低了控制杆滑动时,由于控制齿轮的齿牙与被动齿轮的齿牙未对齐而相撞,导致难以啮合的概率,使得啮合的过程更加顺畅。
11、可选的,所述稳定组件包括滑动设置在所述底座上的摩擦块,所述控制杆上设置有抵触环,所述抵触环用于将所述摩擦块抵触在所述蜗轮杆上,所述摩擦块上开设有若干用于供所述抵触环进入让位的让位槽,所述摩擦块上还安装有用于将所述摩擦块朝远离所述蜗轮杆的方向复位的复位弹性件。
12、通过采用上述技术方案,当控制杆滑动,使控制齿轮的齿牙从一个被动齿轮的齿牙中滑出,朝另一个被动齿轮的齿牙中滑动时,抵触环从让位槽内滑出,此时抵触环将顶动摩擦块抵紧在蜗轮杆上,降低蜗轮杆出现误转的概率,提高顶杆的稳定性。
13、可选的,所述顶杆转动轴与所述底座上均设置有检测件,所述检测件用于检测受到的预制墙板的压力得到检测压力值,并根据所述检测压力值控制所述转动驱动件以及所述滑动驱动件以调整预制墙板的角度。
14、通过采用上述技术方案,通过检测件检测得到检测压力值,根据检测压力值可更加直观的观察预制墙板的角度,也减少了垂直度测量的过程,而是通过压力进行代替,更加方便,且提高自动化程度。
15、本申请提供的一种预制墙板支撑方法,采用如下的技术方案:
16、一种预制墙板支撑方法,包括:
17、获取所述检测压力值;
18、通过所述检测压力值与预设的压力阈值进行对比判断,并输出相应的控制信号以对所述检测压力值进行调整;
19、通过多个所述检测压力值确定墙板角度值;
20、通过所述墙板角度值与预设的角度阈值确定角度差值;
21、通过所述角度差值输出相应的控制信号以对所述检测压力值进行调整。
22、通过采用上述技术方案,通过顶杆与座体受到的压力,自动化计算预制墙板的角度,方便快捷且精准。
23、可选的,通过多个所述检测压力值确定墙板角度值包括:
24、至少两个所述检测压力值对应一个预制墙板,通过同一个预制墙板的多个所述检测压力值与预设的墙板参数确定单板角度值;
25、通过多个所述单板角度值确定所述墙板角度值。
26、通过采用上述技术方案,在多个预制墙板之间进行固定时,通过单板角度值进行角度的矫正辅助,在多个预制墙板之间固定完成后,通过墙板角度值对整体进行角度的矫正,适用性更强。
27、本申请提供的一种计算机存储介质,采用如下的技术方案:
28、一种计算机存储介质,存储有能够被处理器加载并执行预制墙板支撑方法的计算机程序。
29、通过采用上述技术方案,通过计算机存储介质对计算机程序进行存储。
30、综上所述,本申请包括以下至少一种有益技术效果:
31、1.方便快捷,且可实时对预制墙板进行角度调节,角度调节完毕后无需拆卸,可直接起到支撑作用,方便快捷。
32、2.通过顶杆与座体受到的压力,自动化计算预制墙板的角度,方便快捷且精准。
技术特征:1.一种预制墙板支撑装置,其特征在于:包括底座(1),所述底座(1)上转动设置有顶杆(11),所述底座(1)与所述顶杆(11)用于抵触在预制墙板上,所述顶杆(11)转动轴上设置有蜗轮齿(12),所述底座(1)上转动设置有用于所述蜗轮齿(12)啮合转动的蜗轮杆(13),所述底座(1)上设置有用于控制所述蜗轮杆(13)转动的控制组件(2),所述底座(1)上还设置有用于固定所述蜗轮杆(13)状态的稳定组件(3)。
2.根据权利要求1所述的一种预制墙板支撑装置,其特征在于:所述控制组件(2)包括转动设置在所述底座(1)上的控制杆(21),所述控制杆(21)还滑动在所述底座(1)上,所述控制杆(21)上设置有控制齿轮(22),所述蜗轮杆(13)上设置有多个直径不同的被动齿轮(131),所述底座(1)上转动设置有多个换向齿轮(132),所述控制齿轮(22)与尺寸最大的所述被动齿轮(131)啮合,所述控制齿轮(22)通过所述换向齿轮(132)与其他所述被动齿轮(131)啮合。
3.根据权利要求2所述的一种预制墙板支撑装置,其特征在于:所述控制组件(2)还包括转动驱动件(23)以及滑动驱动件(24),所述转动驱动件(23)转动轴连接在所述控制杆(21)上以控制所述控制杆(21)转动,所述滑动驱动件(24)的输出轴连接在所述转动驱动件(23)上以控制所述控制杆(21)滑动。
4.根据权利要求2所述的一种预制墙板支撑装置,其特征在于:所述控制齿轮(22)的齿牙上开设有引导斜面(25),所述引导斜面(25)用于与所述被动齿轮(131)的齿牙抵触并引导所述控制齿轮(22)转动啮合。
5.根据权利要求2所述的一种预制墙板支撑装置,其特征在于:所述稳定组件(3)包括滑动设置在所述底座(1)上的摩擦块(31),所述控制杆(21)上设置有抵触环(26),所述抵触环(26)用于将所述摩擦块(31)抵触在所述蜗轮杆(13)上,所述摩擦块(31)上开设有若干用于供所述抵触环(26)进入让位的让位槽(32),所述摩擦块(31)上还安装有用于将所述摩擦块(31)朝远离所述蜗轮杆(13)的方向复位的复位弹性件(33)。
6.根据权利要求3所述的一种预制墙板支撑装置,其特征在于:所述顶杆(11)转动轴与所述底座(1)上均设置有检测件(4),所述检测件(4)用于检测受到的预制墙板的压力得到检测压力值,并根据所述检测压力值控制所述转动驱动件(23)以及所述滑动驱动件(24)以调整预制墙板的角度。
7.一种预制墙板支撑方法,根据权利要求6所述的一种预制墙板支撑装置,其特征在于,包括:
8.根据权利要求7所述的一种预制墙板支撑方法,其特征在于,通过多个所述检测压力值确定墙板角度值包括:
9.一种计算机存储介质,其特征在于,存储有能够被处理器加载并执行如权利要求7至8任一种预制墙板支撑方法的计算机程序。
技术总结本申请涉及建筑施工的领域,尤其是涉及一种预制墙板支撑装置、方法及其存储介质,其包括底座,所述底座上转动设置有顶杆,所述底座与所述顶杆用于抵触在预制墙板上,所述顶杆转动轴上设置有蜗轮齿,所述底座上转动设置有用于所述蜗轮齿啮合转动的蜗轮杆,所述底座上设置有用于控制所述蜗轮杆转动的控制组件,所述底座上还设置有用于固定所述蜗轮杆状态的稳定组件。本申请具有简化预制墙板调整角度的操作,并使预制墙板的角度更加精准的效果。技术研发人员:吴以添,张建军,伍晓峰,程宗隆,林茂帛受保护的技术使用者:温州市东风建筑工程公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240615/67656.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表