一种装配式墙板吊装定位装置及施工方法与流程
- 国知局
- 2024-07-10 18:22:12
本发明涉及建筑施工领域,尤其涉及一种装配式墙板吊装定位装置及施工方法。
背景技术:
1、装配式建筑中的预制墙板占据很大的装配比重,上下层墙板之间通过套筒灌浆连接是最为广泛应用的连接方式。预制墙板的具体吊装流程是:由塔吊或汽车吊从地面吊起预制墙板,吊升到指定位置后由工人配合就位安装及位置校正,保证下层墙板预留伸出钢筋和上层预制墙板中的套筒对接,并通过临时支撑进行固定。
2、然而,由于塔吊和汽车吊的调整精度较低,需要人力配合辅助调整到墙板的精确位置,这个反复调整的过程需要占据竖向起重机构吊装每块墙板中近一半的时间,导致竖向起重机构的使用效率不高,使得安装时间和施工成本增加。此外,墙板安装易出现预留伸出钢筋垂直度不足及墙体位置偏差的情况,影响墙板安装精度和效率。
3、因此,如何提供一种能够提高墙板安装效率,保证墙板安装质量的装配式墙板吊装定位装置及施工方法是本领域技术人员亟待解决的一个技术问题。
技术实现思路
1、本发明提供一种装配式墙板吊装定位装置及施工方法,以解决上述技术问题。
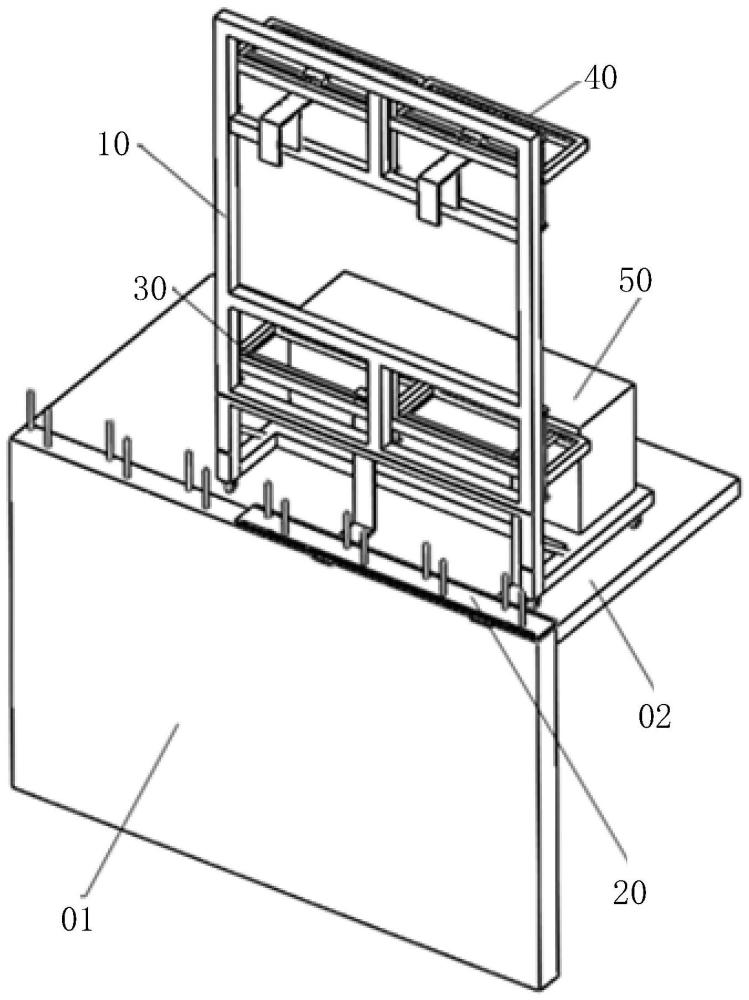
2、为解决上述技术问题,本发明提供一种装配式墙板吊装定位装置,包括架体和安装于所述架体上的定位板、抬臂系统、夹臂系统以及动力控制系统,
3、所述定位板上设有与下层墙体的伸出钢筋相对应的洞口,所述定位板的两面上分别设有第一滑槽和第二滑槽,所述架体的侧面设有与所述第一滑槽匹配的预留轨道;
4、所述抬臂系统包括第一三向位移模块和抬臂本体,所述第一三向位移模块安装于所述架体上,并能够带动所述抬臂本体相对于所述架体进行xyz向移动;所述抬臂本体包括承托板,所述承托板上设有与所述定位板上的第二滑槽匹配的凹槽;
5、所述夹臂系统包括第二三向位移模块和夹臂本体,所述第二三向位移模块安装于所述架体上,并能够带动所述夹臂本体相对于所述架体进行xyz向移动;所述夹臂本体包括用于夹持在上层墙体两侧的前夹臂和后夹臂;
6、所述动力控制系统至少与所述抬臂系统和夹臂系统分别信号连接。
7、较佳地,所述抬臂系统和夹臂系统分别为两组,两组所述抬臂系统位于上层墙体的下方,两组所述夹臂系统位于上层墙体的上方。
8、较佳地,所述架体的底部设有万向轮。
9、较佳地,所述定位板上设有激光测距仪。
10、较佳地,所述定位板的一个侧面为圆轴部,所述架体上设有与所述圆轴部匹配的转动槽口,所述圆轴部能够在所述转动槽口内翻转,将所述第一滑槽送入所述预留轨道内。
11、较佳地,所述第一三向位移模块包括第一z轴轨道、第一xy平面轨道盘和第一连接轴,所述第一z轴轨道沿所述架体的垂向设置,所述第一xy平面轨道盘内设有第一x轴滑竿和第一y轴滑竿,所述第一连接轴安装于所述第一x轴滑竿和第一y轴滑竿上,所述抬臂本体安装于所述第一连接轴上。
12、较佳地,所述第二三向位移模块包括第二z轴轨道、第二xy平面轨道盘和第二连接轴,所述第二z轴轨道沿所述架体的垂向设置,所述第二xy平面轨道盘内设有第二x轴滑竿和第二y轴滑竿,所述第二连接轴安装于所述第二x轴滑竿和第二y轴滑竿上,所述夹臂本体安装于所述第二连接轴上。
13、较佳地,所述夹臂本体上安装有垂直度监测仪。
14、较佳地,所述前夹臂和/或后夹臂通过伸缩调整轴连接。
15、本发明还提供了一种如上所述的装配式墙板吊装定位装置的施工方法,包括如下步骤:
16、步骤1:通过所述定位板对下层墙体的伸出钢筋进行垂直度校正,并测量上层墙体不同落位处的底部标高配置所需垫块;
17、步骤2:将所述定位板套住伸出钢筋进行位置确定并锁死,然后将所述定位板翻转固定于所述架体上的预留轨道内,作为上层墙体落位的对齐参照;将所述夹臂本体和抬臂本体调节至初始位置,完成装置接受墙体准备;
18、步骤3:采用起重机构将上层墙体吊升到安装位置,并放置于所述抬臂本体上,所述夹臂本体伸出下滑至夹住上层墙体,起重机构脱钩;
19、步骤4:利用所述抬臂系统和夹臂系统进行墙体垂直度及位置调节,控制所述抬臂本体和夹臂本体共同下降,落位至垫块上;
20、步骤5:使用临时支撑对上层墙体进行固定,所述夹臂本体抬升高于上层墙体后,抽回架体,完成墙体安装。
21、与现有技术相比,本发明提供的装配式墙板吊装定位装置及施工方法具有如下优点:
22、1、通过塔吊或汽车吊将上层墙体落位到本发明提供的吊装定位装置中,通过该装置提供提前定位以及墙体位置精细化自动调整功能,从而达到提高墙体的安装质量、安装效率,以及竖向起重机构的使用效率,降低施工成本;
23、2、本发明将装配式墙板的安装落位过程通过自动化工具实现,减少安装过程中伸出钢筋校核、墙体位置调整等步骤对于人力的需要,进一步提高了墙板安装全流程的效率。
技术特征:1.一种装配式墙板吊装定位装置,其特征在于,包括架体和安装于所述架体上的定位板、抬臂系统、夹臂系统以及动力控制系统,
2.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述抬臂系统和夹臂系统分别为两组,两组所述抬臂系统位于上层墙体的下方,两组所述夹臂系统位于上层墙体的上方。
3.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述架体的底部设有万向轮。
4.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述定位板上设有激光测距仪。
5.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述定位板的一个侧面为圆轴部,所述架体上设有与所述圆轴部匹配的转动槽口,所述圆轴部能够在所述转动槽口内翻转,将所述第一滑槽送入所述预留轨道内。
6.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述第一三向位移模块包括第一z轴轨道、第一xy平面轨道盘和第一连接轴,所述第一z轴轨道沿所述架体的垂向设置,所述第一xy平面轨道盘内设有第一x轴滑竿和第一y轴滑竿,所述第一连接轴安装于所述第一x轴滑竿和第一y轴滑竿上,所述抬臂本体安装于所述第一连接轴上。
7.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述第二三向位移模块包括第二z轴轨道、第二xy平面轨道盘和第二连接轴,所述第二z轴轨道沿所述架体的垂向设置,所述第二xy平面轨道盘内设有第二x轴滑竿和第二y轴滑竿,所述第二连接轴安装于所述第二x轴滑竿和第二y轴滑竿上,所述夹臂本体安装于所述第二连接轴上。
8.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述夹臂本体上安装有垂直度监测仪。
9.如权利要求1所述的装配式墙板吊装定位装置,其特征在于,所述前夹臂和/或后夹臂通过伸缩调整轴连接。
10.一种如权利要求1至9中任一项所述的装配式墙板吊装定位装置的施工方法,其特征在于,包括如下步骤:
技术总结本发明涉及一种装配式墙板吊装定位装置及施工方法,该装置包括架体、定位板、抬臂系统、夹臂系统及动力控制系统,定位板上设有与下层墙体的伸出钢筋相对应的洞口,定位板的两面上分别设有第一滑槽和第二滑槽,架体的侧面设有与第一滑槽匹配的预留轨道;抬臂系统包括第一三向位移模块和抬臂本体,第一三向位移模块能够带动抬臂本体相对于架体进行XYZ向移动;抬臂本体上设有与定位板上的第二滑槽匹配的凹槽;夹臂系统包括第二三向位移模块和夹臂本体,第二三向位移模块能够带动夹臂本体相对于架体进行XYZ向移动;夹臂本体用于夹持墙体;动力控制系统至少与抬臂系统和夹臂系统分别信号连接。本发明可实现墙体的自动化快速落位,提高了安装质量和效率。技术研发人员:袁龙飞,徐大为,潘峰,黄泽志,杨磊受保护的技术使用者:上海建工五建集团有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240615/67901.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表