一种避障转向的泳池机器人的制作方法
- 国知局
- 2024-07-10 18:28:10
本技术涉及泳池清洁,特别涉及一种避障转向的泳池机器人。
背景技术:
1、随着人们对健康的愈加重视,游泳作为一种非常好的健身锻炼方式受到了年轻人的追捧,为此越来越多的游泳池被建造了出来,但由于游泳池内的水储量比较大,若是经常对其进行更换所需成本太高,所以人们往往采用沉淀法对其进行杂质处理,这种方法使杂质形成沉淀积攒在游泳池底部,后续需要人工或者机器对游泳池底部沉淀进行清理,为此泳池清洁机器人被造就了出来,传统泳池清洁机器人大大节省了人工成本,其经过的地方碎屑沉淀被很好地清理干净,而且泳池清洁机器人可以在游泳池内进行持续性作业。
2、现有公告号为cn219491852u的中国专利,公开了一种泳池清洁机器人,包括机身主体、动力驱动模块、检测模块、控制系统和显示模块;所述动力驱动模块提供动力使得泳池清洁机器人行驶和转向;所述检测模块识别检测水池中水体的水质和温度,并将获取的水体信息传输给所述控制系统;所述控制系统控制所述动力驱动模块,从而控制泳池清洁机器人移动;所述控制系统处理所述水体信息并传输给所述显示模块,其底部设有万向轮或电驱动轮用以与控制系统控制配合实现转向。
3、但上述的泳池清洁机器人存在以下缺点:该泳池清洁机器人采用动力驱动模块提供动力,使得清洁机器人前行和转向,涉及的程序控制较为复杂,导致投入的研发及生产成本较高。
技术实现思路
1、本实用新型的目的是提供一种避障转向的泳池机器人,具有有效降低生产研发成本的效果。
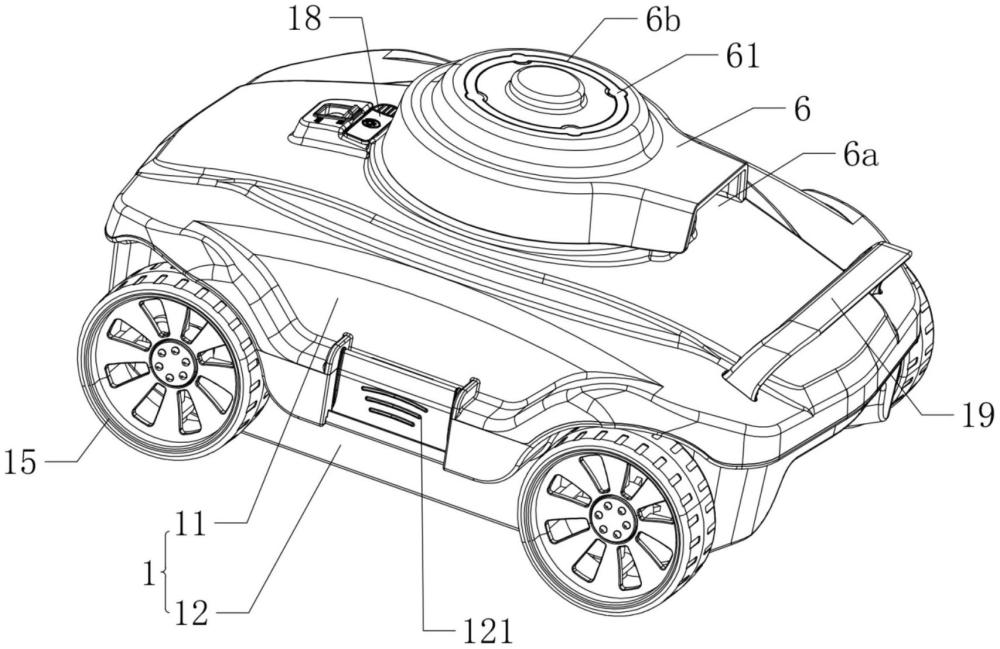
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:一种避障转向的泳池机器人,包括有清洁主体、驱动组件和蜗壳,所述清洁主体设有流道和进水口,所述蜗壳设有喷水口,所述驱动组件驱使水流从所述进水口吸入所述清洁主体中,并经过所述流道后从所述喷水口排出,所述蜗壳浮动设于所述清洁主体上且两者转动连接,所述蜗壳的材料密度小于水的密度;
3、所述蜗壳与所述清洁主体之间设有定位结构,当所述蜗壳下沉并转动至使喷水口的出水方向与所述清洁主体长度方向相平行时,所述蜗壳通过所述定位结构与所述清洁主体定位配合;
4、所述清洁主体设有感应控制组件和若干滚轮,所述感应控制组件通过感应所述滚轮的转动控制所述驱动组件的启停。
5、通过采用上述技术方案,当本泳池机器人沉入水底后,驱动组件将水流从进水口吸入清洁主体内并经过流道从蜗壳的喷水口甩出,在伯努利原理的作用下,喷水口附近的水压相对其周围的水压较低,位于蜗壳上端的水压将蜗壳向下压紧在清洁主体上,此时清洁主体受到水流的反作用力利用滚轮向前移动;当清洁主体碰壁后,滚轮停止转动,感应控制组件感应到滚轮止转的信号并控制驱动组件停止运行,此时喷水口无水流喷出,蜗壳附近的水压处于平衡状态,利用蜗壳自身密度比水轻的特性,蜗壳向上浮起并使定位结构解除定位,当定位结构解除定位后,感应控制组件在程序控制下控制驱动组件自启,驱动组件驱使水流从蜗壳的喷水口甩出,由于驱动组件导致的水流离心力,该离心力驱使蜗壳相对清洁主体发生自转,同时由于喷水口再次出水,喷水口附近的水压再次降低,位于蜗壳上方的水压再次下压蜗壳使其快速下沉直至抵紧于清洁主体上,当蜗壳相对清洁主体转动180°后,蜗壳通过定位结构与清洁主体定位止转,如此,实现本泳池机器人的反推,区别于市场上完全通过程序算法控制泳池机器人换向的方式,本实用新型采用机械与程序控制相结合的方式,区别于采用单一的复杂程序算法控制滚轮换向的方式,可以有效降低生产研发成本,且设备运行过程中巧妙利用了水的浮力和压力对蜗壳进行配合控制,具有结构设计巧妙、有效降低生产研发成本的效果。
6、本实用新型的进一步设置为:所述定位结构包括第一定位凸起和第二定位凸起,所述第二定位凸起设于所述蜗壳上,所述第一定位凸起对应所述第二定位凸起设于所述清洁主体上,所述第一定位凸起与所述第二定位凸起定位止转配合。
7、通过采用上述技术方案,当清洁主体正常前行时,由于离心力的作用使得蜗壳有旋转的趋势,此时第一定位凸起与第二定位凸起相抵,使第一蜗壳相对清洁主体保持止转状态;清洁主体碰壁后叶轮停止转动,此时蜗壳上浮至使第一定位凸起与第二定位凸起相脱离,然后感应控制组件在程序控制下控制驱动组件自启使得蜗壳再次转动,在伯努利原理的作用下,蜗壳受到向下的水压再次下沉并发生自转,直至蜗壳转动180°后,蜗壳的第二定位凸起与清洁主体上的第一定位凸起再次止转配合实现定位,即可使蜗壳进行180°反转实现反推。
8、本实用新型的进一步设置为:所述第一定位凸起设有导向斜面,当所述蜗壳转动并下沉靠近所述清洁主体时,所述第一定位凸起通过所述导向斜面与第二定位凸起导向配合。
9、通过采用上述技术方案,导向斜面起到导向和平缓的作用,使得蜗壳相对清洁主体从最高点转动下沉的过程中,蜗壳可以利用该导向斜面更加平稳的滑移至与清洁主体相抵的状态,防止蜗壳快速下沉与清洁主体撞击导致偏移产生扰流,影响本实用新型中泳池机器人运行的平稳性。
10、本实用新型的进一步设置为:所述感应控制组件包括霍尔传感器和控制板,所述滚轮设有磁性件,所述霍尔传感器与所述磁性件感应配合,所述控制板与所述霍尔传感器、所述驱动组件电性连接。
11、通过采用上述技术方案,霍尔传感器通过感应磁性件的磁通量变化来判断滚轮是否在滚动,然后将滚轮的运行状态反馈给控制板,再利用控制板控制驱动电机的启停,实现程序控制的过程。
12、本实用新型的进一步设置为:所述蜗壳包括转动连接部,清洁主体开设有安装孔,蜗壳通过转动连接部转动连接于安装孔内,转动连接部固定连接有止挡件,清洁主体上端与蜗壳止挡配合,清洁主体下端与止挡件止挡配合,且清洁主体与止挡件之间形成有浮动间隙。
13、通过采用上述技术方案,转动连接部活动穿设于安装孔内,使清洁主体的安装孔侧壁活动设于蜗壳与止挡件之间,利于蜗壳在清洁主体上的安装,止挡件可有效防止蜗壳相对清洁主体发生脱离。
14、本实用新型的进一步设置为:所述清洁主体固设有防水密封座,所述防水密封座开设有容置腔,所述感应控制组件包括霍尔传感器和控制板,所述驱动组件和所述控制板置于所述容置腔内,所述防水密封座与所述清洁主体之间留有所述流道。
15、通过采用上述技术方案,防水密封座将驱动电机和控制板包裹其内,使驱动电机和控制板处于相对密闭的空间,极大地提高了本实用新型电气元件的防水性能。
16、本实用新型的进一步设置为:所述防水密封座包括上密封件和下密封件,所述上密封件和所述下密封件之间设有密封圈。
17、通过采用上述技术方案,密封圈可以提高上密封件和下密封件之间的密封性,防止上密封件和下密封件之间存在接缝导致进水的情况。
18、本实用新型的进一步设置为:所述蜗壳上固定连接有防护壳,所述防护壳的材料密度小于水的密度,所述防护壳设有与所述喷水口相连通的排水孔。
19、通过采用上述技术方案,当驱动组件停止运行时,防护壳可以与蜗壳一起向上自动浮起,防护壳可以对蜗壳起到保护作用,防止蜗壳在泳池中移动时受到撞击导致损坏的情况。
20、本实用新型的进一步设置为:所述防护壳通过螺钉与所述蜗壳固定连接,所述防护壳可拆卸设有装饰件,所述防护壳对应所述装饰件开设有嵌槽,所述装饰件嵌于所述嵌槽内并与所述螺钉遮挡配合。
21、通过采用上述技术方案,装饰件将螺钉隐藏式连接于防护壳内,提高了本实用新型的美观度。
22、本实用新型的进一步设置为:所述清洁主体设有提手。
23、通过采用上述技术方案,操作者可以利用提手将清洁主体整体提起,方便本泳池机器人的拿持。
24、综上所述,本实用新型具有以下有益效果:
25、1.采用采用在清洁主体上开设安装孔,将蜗壳浮动连接于清洁主体上,同时在清洁主体之间设置定位结构,在本泳池机器人正常前行时或在触壁后蜗壳相对清洁主体旋转180°后,蜗壳与清洁主体均可以通过定位结构止转定位,实现本泳池机器人触壁换向的目的,本实用新型采用机械与程序控制相结合的方式,区别于采用单一的复杂程序算法控制滚轮换向的方式,可以有效降低生产研发成本,且设备运行过程中巧妙利用了水的浮力和压力对蜗壳进行配合控制,具有结构设计巧妙、有效降低生产研发成本的效果。
26、2.采用将控制板和驱动电机密封设置于防水密封座的容置腔内,具有提高本泳池机器人防水密封性的效果。
27、3.采用在蜗壳上端加设防护壳,该防护壳的密度也小于水的密度,将防护壳通过螺钉固定连接于清洁主体上,同时在防护壳上嵌设装饰件,利用装饰件对螺钉进行遮盖,具有提高本实用新型整体美观度的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240615/68664.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表