智能运动评测设备及获取运动数据的方法与流程
- 国知局
- 2024-07-11 16:42:28
本发明涉及智能体测,特别涉及一种智能运动评测设备及获取运动数据的方法。
背景技术:
1、在国家倡导全民健身的大环境下,健身市场的需求日益增多。但是,健身房的体测设备都只能在专业教练的指导下进行,对用户不友好不便利。
2、同时,现在的体测设备都只能进行一些简单的力量、体重、体脂等简单的静态数据,但无法测得用户的骨骼关节健康程度,而且,现在的体测设备无法和用户实现双向交互,用户体验很一般。
3、现有技术中,有的智能运动器械,采用深度摄像头采集用户的运动数据和用户进行交互,深度摄像头是通用传感器部件,可以返回带有深度信息的彩色图像,合理利用这些信息,可以高效,准确的得到人的点云信息。现有的人体识别通常是基于人脸识别,例如让人走到机器人面前,机器人根据人脸识别算法判断出这个人是谁。
4、但是,要实现高效、准确地人体识别,在技术上主要如下几个问题:1、人体检测,目标是在环境中准确的将人的点云与周围环境的点云分离出来;2、特征提取,目标是选择合适的特征,使得人体识别的准确率较高。由于光线,角度等一系列的变化,需要找出对光线变化以及角度变化不敏感的特征;3、特征学习,得到了上述特征数据,还需要对上述特征进行学习,得到一个合适的判别式,使得同一个人特征值差别要比不同人的特征值差别要小。
5、因此,虽然基于深度摄像头的人体识别技术越来越火,但在很多场合下,尤其是人体识别的场合,深度摄像头存在很多误差。
技术实现思路
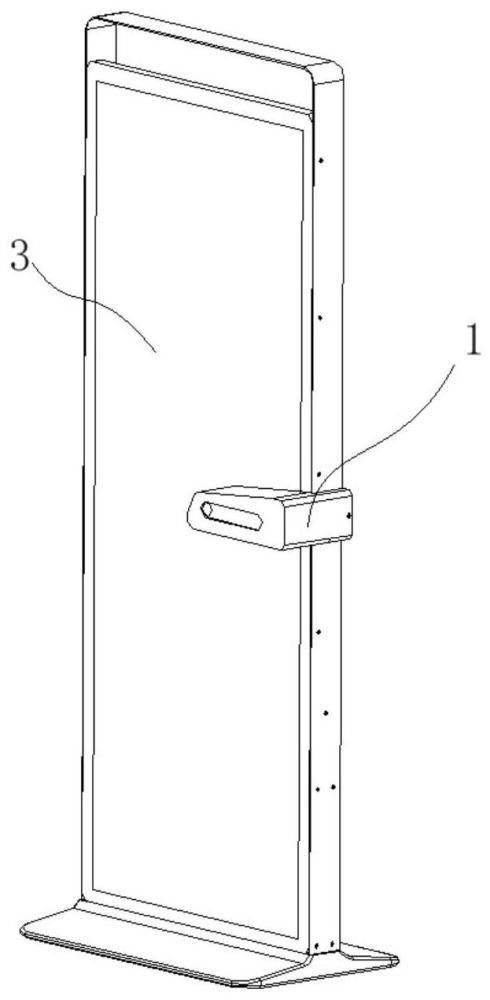
1、根据本发明实施例,提供了一种智能运动评测设备,包含:
2、动作捕捉模块,动作捕捉模块实时采集用户的运动数据;
3、交互模块,交互模块用于引导用户做出运动动作;
4、镜面,镜面覆盖在交互模块表面,动作捕捉模块设置在镜面表面,用户可通过镜面观察自身动作的同时透过镜面与交互模块进行交互;
5、控制模块,控制模块用于处理运动数据,控制动作捕捉模块和交互模块。
6、进一步,动作捕捉模块包含:深度摄像头和摄像头调节模组;
7、深度摄像头用于采集运动数据;
8、摄像头调节模组与深度摄像头相连,用于调节深度摄像头的姿态。
9、进一步,摄像头调节模组包含:三个电机,三个电机分别调节深度摄像头的俯仰角、偏航角和翻滚角。
10、进一步,动作捕捉模块还包含:若干惯性传感器,若干惯性传感器分别穿戴于用户的骨骼关节处,惯性传感器将采集到的运动数据传输至控制模块。
11、进一步,运动数据为用户骨骼关节处的实时位置,用户的骨骼关节处包含但不限于:头部、左肩、右肩、胸锁关节、左手肘、右手肘、左手腕、右手腕、骨盆、左髋、右髋、左膝、右膝、左脚踝、右脚踝。
12、进一步,镜面为单面反射镜。
13、进一步,用户可选地指令交互模块将运动数据附着在用户的对应的骨骼关节处。
14、根据本发明又一实施例,提供了一种智能运动评测设备的获取运动数据的方法,包含如下步骤:
15、s1:深度摄像头获取用户多个骨骼关节处在空间中的第一位置坐标数据以及对应的可信度;
16、s2:控制模块分析各个骨骼关节处的第一位置坐标数据,确定需要优化的第一位置坐标数据所对应的骨骼关节;
17、s3:在需要优化位置坐标数据的骨骼关节处分别配置惯性传感器;
18、s4:定义惯性传感器的自身坐标系;
19、s5:惯性传感器获取自身坐标系中的用户骨骼关节处的第二位置数据,以及,各个骨骼关节点的速度和加速度;
20、s6:控制模块将第二位置数据转换为世界坐标系下的第三位置数据;
21、s7:基于关于第三位置数据、各个骨骼关节点的速度和加速度的离散的非线性微分方程;
22、s8:基于第一位置坐标数据和可信度,建立预测方程,获取运动数据;预测方程中包含基于可信度获得的预测噪声协方差。
23、进一步,在步骤s7中,非线性微分方程中,还包含过程噪声,骨骼关节的运动距离越大,过程噪声的协方差越大。
24、进一步,还包含步骤s9,基于扩展卡尔曼滤波器和惯性传感器数据,将预测方程线性化,更新预测方程和预测噪声协方差,并根据深度摄像头采集的数据获得卡尔曼增益,反复更新预测方程和预测噪声协方差,即更新运动数据。
25、根据本发明实施例的智能运动评测设备及获取运动数据的方法,通过与设备交互、传感器融合算法,直接获得专业的训练和评估,且能获得更标准、更精准、更全面的数据,从而得到更准确的评测结果。
26、要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并且意图在于提供要求保护的技术的进一步说明。
技术特征:1.一种智能运动评测设备,其特征在于:包含:
2.如权利要求1所述智能运动评测设备,其特征在于,所述动作捕捉模块包含:深度摄像头和摄像头调节模组;
3.如权利要求2所述智能运动评测设备,其特征在于,所述摄像头调节模组包含:三个电机,所述三个电机分别调节所述深度摄像头的俯仰角、偏航角和翻滚角。
4.如权利要求2任一项所述智能运动评测设备,其特征在于,所述动作捕捉模块还包含:若干惯性传感器,所述若干惯性传感器分别穿戴于用户的骨骼关节处,所述惯性传感器将采集到的运动数据传输至所述控制模块。
5.如权利要求1或2或4任一项所述智能运动评测设备,其特征在于,所述运动数据为用户骨骼关节处的实时位置,所述用户的骨骼关节处包含但不限于:头部、左肩、右肩、胸锁关节、左手肘、右手肘、左手腕、右手腕、骨盆、左髋、右髋、左膝、右膝、左脚踝、右脚踝。
6.如权利要求1所述智能运动评测设备,其特征在于,所述镜面为单面反射镜。
7.如权利要求1所述智能运动评测设备,其特征在于,用户可选地指令所述交互模块将所述运动数据附着在用户的对应的骨骼关节处。
8.一种智能运动评测设备获取运动数据的方法,其特征在于,包含如下步骤:
9.如权利要求8所述智能运动评测设备获取运动数据的方法,其特征在于,在所述步骤s7中,所述非线性微分方程中,还包含过程噪声,所述骨骼关节的运动距离越大,所述过程噪声的协方差越大。
10.如权利要求8或9所述智能运动评测设备获取运动数据的方法,其特征在于,还包含步骤s9,基于扩展卡尔曼滤波器和惯性传感器数据,将所述预测方程线性化,更新预测方程和所述预测噪声协方差,并根据所述深度摄像头采集的数据获得卡尔曼增益,反复更新预测方程和所述预测噪声协方差,即更新运动数据。
技术总结本发明公开了一种智能运动评测设备及获取运动数据的方法。本发明公开的一种智能运动评测设备,包含:动作捕捉模块,动作捕捉模块实时采集用户的运动数据;交互模块,交互模块用于引导用户做出运动动作;镜面,镜面覆盖在交互模块表面,动作捕捉模块设置在镜面表面,用户可通过所述镜面观察自身动作的同时透过镜面与交互模块进行交互;控制模块,控制模块用于处理运动数据,控制动作捕捉模块和交互模块。本发明通过与设备交互、传感器融合算法,直接获得专业的训练和评估,且能获得更标准、更精准、更全面的数据,从而得到更准确的评测结果。技术研发人员:应俊,徐一凡,顾少骋受保护的技术使用者:江苏启玥智能科技有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240615/80761.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表