一种牵引支撑装置及其工作方法与流程
- 国知局
- 2024-07-11 17:38:04
本发明涉及医疗器械,具体是涉及一种牵引支撑装置及其工作方法。
背景技术:
1、肱骨近端骨折是临床上常见一种上肢骨折类型,其定义是发生于肱骨大结节基底部往近端的骨折,最常见于老年骨质疏松的患者,常由低能量损伤所致,发病率呈逐年增加现象。在发生肱骨近端骨折后,肱骨头及大结节产生移位,由于各骨折块肌腱的牵拉,使得骨折复位操作复杂而又难以保证复位效果,目前通常需要借助牵引设备对患肢进行闭合复位牵引后进行固定,使用牵引设备牵引患肢时无论是牵引力度、牵引角度均需要进行调整,整个牵引调整过程难度高、耗时长。
2、现有技术中的牵引设备,例如中国发明专利申请公开号为cn110840580a的专利申请提供了一种肩关节镜侧卧位牵引装置,包括:牵引机构、调节机构以及滑轮组件;所述牵引机构与调节机构连接;所述调节机构安装在滑轮组件上;所述牵引机构包括:可伸缩悬臂、支撑支架以及第一齿轮调节组件;所述可伸缩悬臂与支撑支架连接;所述第一齿轮调节组件安装在支撑支架上。该本发明通过旋转手柄、丝杆、丝杆连接装置、丝杆与可伸缩悬臂连接结构等配合带动可伸缩悬臂前端向下,进而仰角角度变小,实现悬臂仰角大小的调节,虽然适合肩关节镜手术,但是并不适用于肱骨近端骨折闭合复位,而且该设备结构较为复杂,无法精准调节牵引力大小,牵引调整过程难度高、耗时长。
技术实现思路
1、本发明的主要目的在于克服上述背景技术存在的缺陷,提供一种牵引支撑装置其工作方法。
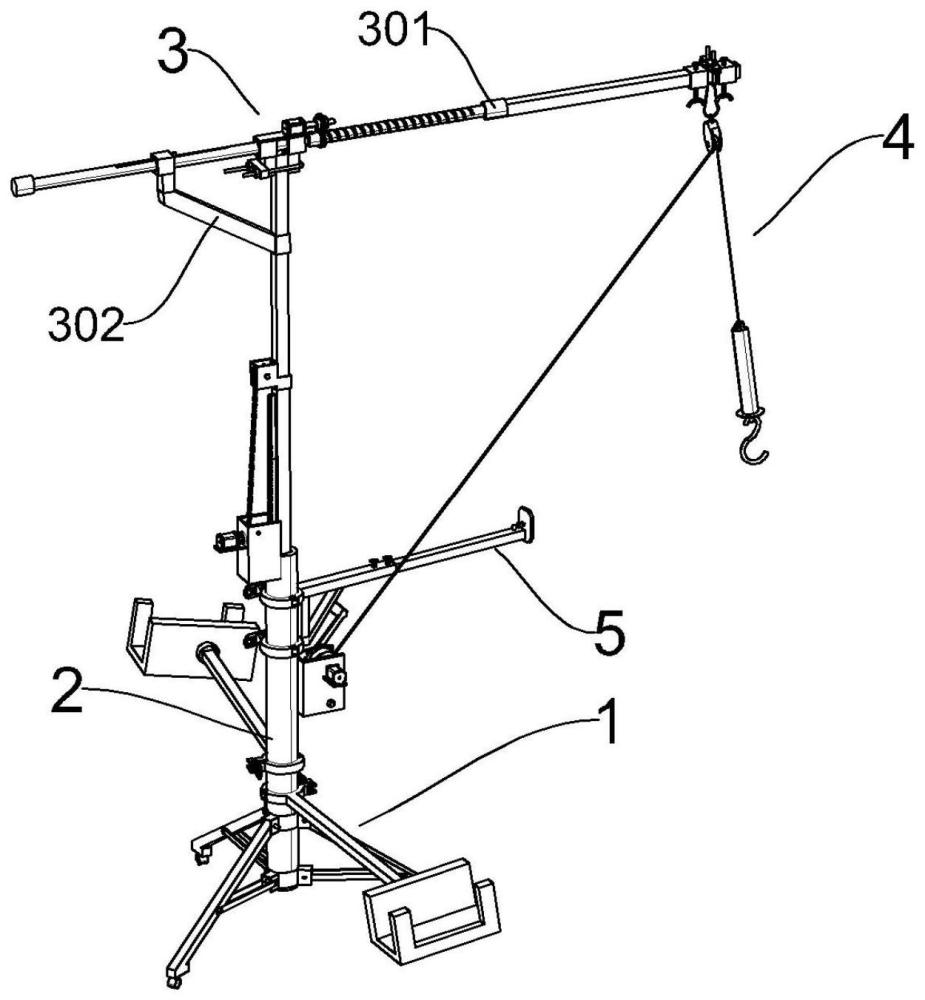
2、为实现上述目的,本发明提出的牵引支撑装置包括支撑架、立柱组件、横杆组件和牵引机构,所述支撑架与所述立柱组件连接,所述横杆组件设置在所述立柱组件的顶部,所述牵引机构包括绞盘、牵引绳、定滑轮组件和牵引力检测仪,所述绞盘设在所述立柱组件上,所述定滑轮组件设在所述横杆组件上,所述牵引绳的一端绕卷在所述绞盘上,另一端绕过所述定滑轮组件后与所述牵引力检测仪连接,所述牵引力检测仪的伸出端设有挂钩。通过将患肢捆绑到挂钩上,然后绞盘转动收卷或放卷牵引绳,牵引绳牵拉或下放患者的患肢调整到所需的角度,牵引过程通过牵引力检测仪能够便于医护人员了解当前的牵引拉力大小并转动绞盘进行调节至适当的拉力,避免过度牵引导致并发症出现。
3、进一步地,所述立柱组件包括固定段和第一升降段,所述固定段的底部与所述支撑架连接,所述固定段设为中空结构并套设于所述第一升降段上,所述第一升降段上设有齿条,所述固定段上设有第一齿轮,所述第一齿轮与所述齿条啮合连接,所述第一齿轮连接有第一驱动件,所述第一驱动件用于驱动所述第一齿轮旋转进而带动所述第一升降段从所述固定段内伸出或缩回。通过第一驱动件带动第一齿轮正传或反转,从而带动第一升降段从固定段伸出或缩回,以改变横杆组件和定滑轮组件的水平高度,调节牵引绳的牵拉角度。
4、进一步地,所述立柱组件还包括第二升降段,所述第一升降段设为中空结构并套设于所述第二升降段上,所述第一升降段的顶部设有链轮,所述链轮上设有链条,所述链条的一端与所述第二升降段的底部固定连接,所述链条的另一端绕过所述链轮后与所述固定段固定连接,当所述第一驱动件驱动所述第一齿轮旋转,所述第一升降段从所述固定段内伸出时带动所述链轮同步向上移动,所述链轮向上移动时抵着所述链条带动所述第二升降段从第一升降段内伸出,实现二级伸缩。在第一升降段从固定段的内部伸出的同时,通过链轮顶着链条上升,链条拉着第二升降段从第一升降段内伸出,进一步加快上肢牵引角度的调节。
5、所述第一升降段和所述第二升降段均采用方矩管,所述固定段的中空截面呈凸形口形状。通过采用方矩管,避免第一升降段、第二升降段和固定段之间相对转动。
6、进一步地,还包括前臂,所述前臂一端与所述固定段连接,所述前臂的自由端设有承托板。通过前臂对患者手部起到一定支撑作用。所述前臂的主体采用套管伸缩结构,所述前臂上设有定位螺栓。
7、进一步地,所述横杆组件包括活动杆、辅助支撑杆、导套和第二驱动件,所述活动杆通过安装件安装在所述第二升降段的顶端,所述辅助支撑杆一端与所述第二升降段连接,另一端与所述活动杆套接形成三角支撑结构,所述活动杆上从左到右依次为直线导槽段、螺纹导槽段和支撑段,所述导套套在所述螺纹导槽段上,所述导套外圆周面设有第二齿轮,所述导套径向设有伸入所述螺纹导槽段上的螺纹导槽内的第一导块,所述第二驱动件的输出端设有第三齿轮,所述第二齿轮与所述第三齿轮啮合连接,所述辅助支撑杆的上端设有与所述直线导槽段相对应的第二导块,所述定滑轮组件安装在所述支撑段的一端。
8、进一步地,所述定滑轮组件包括滑轮座和滑轮,所述滑轮可转动设在所述滑轮座上,所述滑轮座上设有挂环,所述挂环上连接有u型扣,所述u型扣与所述支撑段套接,所述u型扣两侧设有卡环,所述卡环套接在所述支撑段上,所述卡环上设有锁紧螺钉。通过两侧的卡环可限制u型扣的移动位置,进而限制滑轮组件在支撑段上相对的位置进行调整,便于对牵引角度的调节。
9、进一步地,所述支撑架包括三角架和固定臂,所述三角架与所述立柱组件的底部连接,所述固定臂通过卡箍与所述立柱组件连接,所述固定臂的自由端设有卡止件。通过卡止件与手术床的边缘进行固定卡接,增加整个的牵引支撑装置的稳定性。
10、进一步地,所述三角架的底部设有万向轮。通过万向轮方便移动整个的牵引支撑装置到不同的地点使用,增加便捷性。
11、进一步地,所述固定臂的自由端设有万向接头,所述卡止件通过所述万向接头与所述固定臂连接。通过万向接头增加卡止件的活动角度,以方便卡止件与手术床的床边固定连接。
12、进一步地,还包括控制单元,所述绞盘、所述牵引力检测仪、所述第一驱动件和所述第二驱动件均与所述控制单元电连接,用于控制整个所述牵引支撑装置的工作,所述控制单元电连接有用于检测牵引角度的传感器,所述牵引角度包括患肢外展角度、前移角度和后移角度。
13、本发明提出的牵引支撑装置的工作方法,包括以下步骤:s1、患者侧卧于手术床上,手术床位于c型臂机工作位,推动牵引支撑装置移动到手术床边并通过固定臂与手术床的床沿进行固定,使牵引支撑装置的位置与患者身高相匹配;s2、使用绑带缠绕患肢的尺桡骨,然后将牵引力检测仪上的挂钩与绑带连接;s3、通过绞盘的转动收卷牵引绳,使牵引绳牵拉患肢向上抬起外展;s4、基于c型臂机采集患者骨折部位医学影像数据,并建立骨折部位三维模型;s5、跟据三维模型中骨折处的边缘曲线进行拟合,并计算骨折闭合复位所需的移动轨迹;s6、根据移动轨迹计算出骨折闭合复位所需牵引力、外展角度、前移或后移角度参数;s7、将步骤s6得到的参数输入控制单元,控制单元控制牵引支撑装置的对骨折部位进行自动牵引复位的调整;控制单元根据输入的牵引力、外展角度、前移或后移角度数据,通过控制绞盘收卷或放卷牵引绳对牵引力大小进行调整,牵引时牵引力检测仪实时检测牵引力的大小并反馈至控制单元,通过第一驱动件带动第一齿轮旋转进而带动第一升降段和第二升降段的伸出或缩回对外展角度进行调整;通过第二驱动件带动导套旋转,导套上的第一导块推动活动杆前移或后移对前移或后移角度进行调整了。s8、牵引闭合复位后移动前臂并带动承托板伸至患肢尺桡骨处,使用绑带将患者尺桡骨与承托板进行固定。
14、本发明的有益效果包括:通过将患者的尺桡骨捆绑到挂钩上,然后驱动绞盘转动收卷或放卷牵引绳,牵引绳牵拉使患肢外展调整到所需的角度,然后通过牵引力检测仪能够便于医护人员了解当前的牵引拉力大小并通过绞盘的旋转进行调节至适当的拉力,以拉开骨折错位处进行闭合复位同时避免过度牵引。
本文地址:https://www.jishuxx.com/zhuanli/20240615/85179.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表